基于小波变换的亚像素计算机视觉检测算法*
2017-09-11申宗林李智成李彩红梁皓嶙
申宗林,李智成,李彩红,梁皓嶙,李 锋
(广东交通职业技术学院,广州 510650)
基于小波变换的亚像素计算机视觉检测算法*
申宗林,李智成,李彩红,梁皓嶙,李 锋
(广东交通职业技术学院,广州 510650)
计算机视觉检测作为一种非接触检测手段在工业制造中逐步兴起,传统像素级精度己经不能满足实际检测需求。提出利用小波变换函数改进最小二乘回归直线拟合法方法,先根据一次、二次微分找出其突变点,一次微分的极大值点对应二次微分的零交叉点和平滑后信号的拐点,再结合小波变换模型通过减小尺度的方式精确定位成像边缘,以达到亚像素精度需求。并基于C++编写尺寸检测系统,可以检测大小、完整性等,并找出缺陷产品,联动控制报警机制,从而降低人工视觉检测的复杂度。仿真实验证明,新算法精度可以达到亚像素级别,测试结果稳定,误差很小,具有良好的通用性。
计算机视觉;亚像素;小波变换;检测系统;最小二乘法;拟合算法
1 引言
计算机视觉检测作为一种非接触检测手段在智能制造中逐步兴起。它将被摄取目标转换成图像信号传送到图像处理系统,由计算机根据像素分布和亮度、颜色等信息将其转变成数字化信号,再通过检测算法提取目标特征并与样品参数对比,超出预设阈值即联动报警机制和响应动作,以控制生产流程,保证产品质量。
随着工业检测对精度要求的不断提高,像素级精度己经不能满足实际检测需求,亚像素算法应运而生[1]。机械零件在进行影像采集时,背景光源和物体反射的信号存在差别,造成物体对阶跃边缘响应信号的接收存在一个由暗到明的渐变过程,边缘点亚像素位置存在这一过渡阶段,使得成品图像边缘灰度呈连续性分布[2]。因此,提出在物体成像边缘特征点光强函数斜率最大的地方,利用小波变换函数改进最小二乘回归直线拟合法法,利用一次和二次微分找出突变点,从而判断亚像素位置,确定器件形状。改进算法对检测器件具有一定的通用性和普适性,并可以提高物体边缘检测精度。
2 亚像素边缘检测
亚像素边缘检测算法需要先利用级数获取物体边缘成像精度,并在像素之间补充修正以获取边缘位置。亚像素边缘检测常用的方法有拟合法、矩方法、插值法等[3],其中,最小二乘回归直线拟合算法最为经典,实现步骤如下:
当亚像素获取物体成像边缘时,需分别针对直线和圆形边缘进行拟合。
(1)针对直线边缘的拟合算法:


从而得到极值条件满足关系如下:
通过解式(3)方程求得c0和c1,得到拟合直线表达式,以此把目标图像直线特征检测转化为直线之间距离求解问题,通过多次迭代求精计算亚像素区域位置。
(2)针对圆的边缘拟合算法:
设中心为(a,b),半径为R的圆方程为:


从而计算残差值ei为:

按照最小二乘法逼近规则,计算标准方差值并令其最小,从而转化为以A,B,C为未知量的多元函数极值问题,求出最小二乘法拟合圆心(a,b)和半R。即满足A,B,C解的最小二乘估计值误差为:
解出上述A、B、C值,进行若干次迭代后得出圆心位置精确值,即亚像素区域位置。
3 新算法思想与改进
利用最小二乘回归直线拟合算法定位亚像素边缘方法简单[4-5],迭代次数越多,精度也越高,直到满足亚像素微米级别。但这种通过迭代求精方法效率不高,并需要事先定义边缘图像中像素点分布表达式和各项参数值[6],初始化参数值对定位精确差异较大,造成算法结果差异较大,稳定性不高。
新算法实现思想是:不管是对直线还是圆形边缘拟合,最小二乘回归直线拟合可归结为对平滑曲线的拟合。定义平滑函数f(x),先根据一次、二次微分找出其突变点,一次微分的极大值点对应二次微分的零交叉点和平滑后信号的拐点,再结合小波变换模型通过减小尺度的方式以精确定位成像边缘,以达到亚像素精度需求。
小波变换是80年代后期在傅立叶函数基础上发展起来的算法模型。通过引入小波变换可以将交织在一起的各种图像分解成不同级别的像素点。当小波变换尺度减小时,对图像像素细节更加敏感,直至精确至亚像素级别,此时可以使用拉普拉斯算子二阶求导计算即可判定亚像素位置,确定边缘、形状、角点等信息[7-8],最后将亚像素拐点连线后获得物体边缘成像。
4 基于小波变换的亚像素边缘检测算法
4.1 小波变换与最小二乘法建模


4.2 亚像素点的判定

根据式(13),对于像素点(i,j),其算子差分表达式为:

5 基于C++检测软件
基于C++编写计算机视觉尺寸检测系统,包括图像处理,图像定位,参数设置,结果输出等。先通过标定将以亚像素为单位的尺寸转化为以微米为单位的尺寸,再将亚像平面中拐点连线获得物体边缘位置,输出结果。若输出结果与标准尺寸相差过大则联动报警机制,系统检测流程见图1所示。
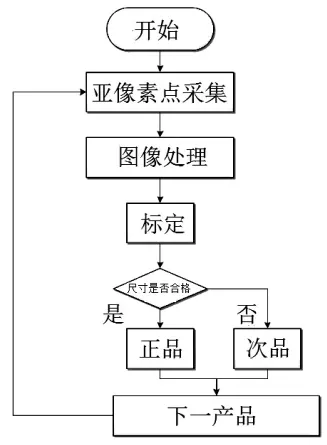
图1 检测流程图
6 实验测试
6.1 物体边缘成像测试
实验选取工件实际尺寸5.265mm*5.265mm,得到像素值3690pix*3690pix,通过亚像素拐点连线后的物体边缘成像见图2所示。
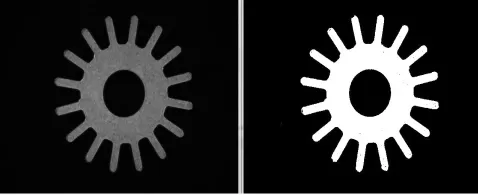
图2 物体边缘成像
6.2 标定测试
标定测试采取多次测量求取均值,转化系数k=0.014mm/pix,测量100次结果见图3所示。从中可以看出,标定精度在0.001mm上测试数据起伏平稳,平均误差小于1微米,已达到亚像素级别。
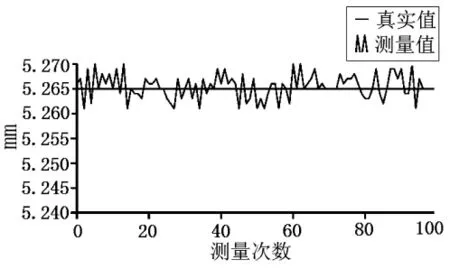
图3 标定测试图
7 结束语
利用小波变换函数改进最小二乘回归直线拟合法提高了物体边缘检测精度。 实验证明,该算法精度可以达到亚像素级别,测试结果稳定,误差很小,具有良好的通用性。
[1]Chung-Chia Kang,Wen-June Wang.A Novel Edge Detection Method Based on the Maximizing Objective Function[J].Pattern Recognition,2007,12(40):609-618.
[2]Mu-Chen Chen.Roundness Measurement for Discontinuous Perimeters via Machine Vision[J].Computer in Industry,2002,26(4):185-197.
[3]Melvyn,Smith,Richard,Stamp.Automated Inspection of Textured Ceramic Tiles[J].Computers in Industry,2000,13(43):73-82.
[4]Dunin-Barkowski I,Yang S H,Kim Y S,Lee S R.Error Compensation Method for a Gantry Robot and a Laser-vision Sensor-based Chassis Module Measurement System[J].The International Journal of Advanced Manufacturing Technology,2005,27(3):329-333.
[5]Mammarella M,Campa G,Napolitano M R.Machine Vision Integration Using EKF for the UAV Aerial Refueling Problem[J].IEEE Trans Systems Man and Cybernetics,2008,38(6):791-801.
[6]H.Golnabi,A.Asadpour.Design and Application of Industrial Machine Vision Systems[J].Robotics and Computer-Integrated Manufacturing,2007,23(8):630-637.
[7]HO-MING LIN.Median Filters with Adaptive Length[J].IEEE Transactions on Circuits and Systems,1988,35(6):675-690.
[8]Yu Qiaoyun,Xing Xiao,Hu Hongzhuan.Application of Straight Line Fitting Method to the Edge Detection Image[J].Opto-Electionic Engineering,2001,28(6):56-68.
Computer Sub-pixel Vision Detection Algorithm Based on Wavelet Transformation
Shen Zonglin,Li Zhicheng,Li Caihong,Liang Haolin,Li Feng
(Guangdong Communication Polytechnic,Guangzhou 510650,China)
Computer vision detection,as a kind of non-contact detection methods,is gradually rising in the industrial manufacture.Traditional pixel level accuracy has been unable to meet the needs of the actual detection.This paper puts forward a improved least squares regression linear fitting model,using wavelet transform function,according to the first order and second order differential,finding the mutation point,the maximum point of the first order differential and corresponding to the zero crossing point of the second differential and inflection point of the signal after smoothing,and combining with wavelet transform model,by the way of reducing scale,to precisely locate the edge of imaging in order to achieve sub-pixel accuracy requirements.And on the basis of C++,size detection system is programmed,which can be used to detect the size and integrity,so as to detect defective product,and coordinately control the alarming mechanism to reduce the complexity of artificial vision detection.The simulation results show that the accuracy of the new algorithm can reach sub-pixel level with stable measure result,less error,and well versatility.
Computer vision;Sub-pixel; Wavelet transform;Detecting system;Least square method;Fitting algorithm
10.3969/j.issn.1002-2279.2017.04.016
TP393
A
1002-2279-(2017)04-0064-03
广东省大学生科技创新培育专项资金项目(项目编号:pdjh2017b0618);全国交通运输职业教育教学指导委员会2015年交通运输职业教育科研项目(项目编号:2015B21);2016广东省高职教育精品在线开放课程(粤教高函【2016】256号);中国交通教育研究会教育科学研究课题(项目编号:1402-136)
申宗林(1997—),男,甘肃省兰州市人,学生,研究方向:网络工程。
2017-03-20