输入饱和的一类切换系统神经网络跟踪控制
2017-09-11司文杰董训德王聪
司文杰 董训德 王聪
输入饱和的一类切换系统神经网络跟踪控制
司文杰1董训德1王聪1
针对单输入单输出系统研究一种在任意切换下的跟踪控制问题,系统包含未知扰动和输入饱和特性.首先,利用高斯误差函数描述一个连续可导的非对称饱和模型.其次,利用径向基神经网络(Radial basis function neural network,RBF NN)逼近未知的系统动态.最后,基于公共的Lyapunov函数构造状态反馈控制器.设计的控制器避免过多参数调节从而减轻计算负荷.结果展示本文给出的状态反馈控制器可以保证闭环系统的所有信号是半全局一致有界的,并且跟踪误差可收敛到零值小的领域内.最后的仿真结果进一步验证提出方法的有效性.
切换非线性系统,公共的Lyapunov函数,非对称饱和,自适应Backstepping
切换控制在化工、机械操作、电力控制等工业生产中被广泛应用[1−2],其构成的系统是由一系列时间连续的子系统和起协调切换作用的规则组成.有两种方法被用来解决切换系统的稳定性问题,第一种是利用公共的Lyapunov函数以保证系统在切换规则下的稳定性;另一种是利用多个Lyapunov函数使切换系统稳定.文献[3]在任意切换的两个子系统中通过公共控制Lyapunov函数解决了其跟踪控制问题.文献[4]考虑一类严格反馈形式的任意切换控制系统,采用Backstepping方法和控制稳定性理论构造控制器.文献[5]在任意切换情况下开展了切换系统的鲁棒H∞跟踪控制研究.文献[6]给出了一种具有很好的跟踪效果和抗扰动能力的切换控制方法.但是这些工作[3−6]的切换控制器设计需要系统模型是已知的.
模糊逻辑系统(Fuzzy logic systems)和神经网络(Neural networks)已经被证明可以逼近任意的非线性函数.因此,出现了基于模糊逻辑或神经网络的切换控制研究.文献[7]针对一类非线性函数完全未知的切换系统提出了一个自适应神经网络控制,但是该方法需要构造切换规则,即切换信号不是随意的.在文献[8]提出了一个新的神经网络控制策略去满足系统的不确定和切换的跳变,但是需要满足一定的驻留时间(Dwell-time).文献[7−8]是针对一类严格反馈的非线性系统.文献[9]针对一类纯反馈的切换系统设计了自适应模糊Backstepping控制器.基于滤波的Backstepping方法和Lyapunov稳定性理论,研究了纯反馈系统的神经网络切换控制问题[10].在一般的自适应神经网络控制中,需要大量神经网络权值的更新,直接导致计算负荷的增加.文献[11]给出了严格反馈形式的直接神经网络跟踪控制.文献[12]考虑了一类严格反馈系统在输入受限(具有饱和特性)下的神经网络控制.文献[13]基于确定学习理论给出了神经网络动态面控制方法.但是文献[11−13]在利用Backstepping技术设计控制器时用到神经网络权值向量的更新,随着神经元数目的增加会导致计算负荷增大.本文在设计控制器时避免了过多自适应更新参数的计算最终减小了运算负担.
实际中,许多系统都可以归为严格反馈系统的结构,例如,四分之一主动悬挂系统(The quarter-car model)、柔性关节机器人 (Flexible joint robots)[14]、连续搅拌釜式反应器(Continuous stirred tank reactor,CSTR)[15]等.因此研究严格反馈系统的控制问题一直是工业应用中的热点.输入非线性特性,如输入饱和(Input saturation)、死区特性(Deadzone)、间隙(Backlash)、磁滞(Hysteresis)等在工业系统中是常见的.压电陶瓷驱动[16]会出现磁滞现象,发动机退喘在磁滞特性线的影响下会导致发动机性能的损失,电机私服系统[17]会出现输入死区特性,机械的运动[18]等不可避免地出现死区现象.其中,输入饱和特性是其中常见的输入限制[19],可能使控制系统性能衰退,常常引起控制效果不理想甚至破坏系统的稳定性;对于作用于能量和幅值的输出控制,需要研究控制器输出的饱和特性.因此针对饱和非线性特性分析和稳定性有大量的研究.文献[20]研究具有输入饱和的一类输出受限的非线性系统,构建了模糊逻辑的输出反馈控制器.针对非平滑输入饱和的一类单输入单输出严格反馈随机系统研究神经网络自适应控制策略[21].文献[22]针对多输入多输出的随机纯反馈系统,设计了具有输入饱和的模糊逻辑输出反馈控制器.
任意切换下自适应控制的研究是一项困难的工作.文献[23]设计了模糊逻辑的切换控制,系统包含了死区特性,虽然是在预设性能的条件下完成跟踪控制任务,但是在仿真例子中仍有一定的跟踪误差和需要固定的切换信号.文献[24]给出了随机系统的切换控制研究,切换需要一定的驻留时间并且在仿真例子中的跟踪信号是大幅值频率很低的正弦信号.文献[25−26]同样是在固定切换信号下完成的自适应控制设计,最终仿真例子中没有达到理想的跟踪效果.文献[27]研究了一类纯反馈的任意切换控制,用到了多个自适应更新率并且最后的仿真结果没有最终稳定.因此在任意切换情况下保证系统的跟踪性能和调整时间是一项困难的工作.本文研究的自适应任意切换控制可以保证较好的跟踪性能和较短的调整时间并且只用到单一的更新率,使得控制器设计更加简单具有工程应用价值,特别对研究输入受限的系统具有一定的价值.
本文针对具有输入饱和的一类严格反馈系统,设计在任意切换下的自适应神经网络跟踪控制器,并且包含完全未知的系统动态.在控制器设计中,利用RBF神经网络去逼近未知的非线性系统动态.提出的自适应控制器可以保证闭环系统的所有信号半全局一致有界(Semi-globally uniformly ultimately bounded,SGUUB),跟踪误差收敛到零值小的范围内.
本文的主要贡献如下:
1)利用高斯误差函数把不对称的饱和非线性表达为连续的可微分形式,以便于应用在Backstepping设计中.
2)利用RBF神经网络去逼近未知的非线性系统函数,提出的控制器可以解决在任意切换系统中的跟踪控制问题.与文献[23−27]相比,本文提出的控制策略可以在任意切换控制的情况下保证较小的跟踪误差并具有较快的调整时间.
3)本文避免大量神经网络径向基函数的运算,并且只包含了单一的自适应更新率.与文献[11−13]设计的神经网络控制方法相比,本文提出的方法减少了更新参数最终减轻了运算负荷.本文系统包含了不对称饱和输入特性和不确定项,这些更符合实际在线运算的要求.
1 问题描述及预备知识
本部分给出系统描述,并且介绍饱和模型和RBF神经网络.
1.1 系统描述
考虑如下的一类严格反馈非线性系统

目标是设计神经网络控制器,使得系统(1)在有界的误差内跟踪时变的信号yd(t),并保证闭环系统在任意切换的条件下所有信号都是有界的.
u(v)∈R是系统输入和饱和器的输出,如下描述
其中,u+和u−分别是u(t)的上界和下界.
假设1.对于i=1,2,···,n,gi,σ(¯xi)的符号是已知的.这里存在正的函数gi,min和gi,max使得

注1.条件(3)表示gi,σ()是严格正或者严格负,因此限制了控制系统的应用范围.在过去的十几年里,很多自适应神经网络控制(Adaptive neural network control,ANNC)的研究结论都是基于类似的假设[28].本文也假设gi,σ()符号是正的.本文使用gi,σ()的界限来构造控制器和设计虚拟控制函数.

其中,c和d是正的设计参数.通过两边乘ect,并对其在区间[0,t]进行积分,最终的不等式如下:

这表明V(t)将会收敛到以零为中心d/c为半径的领域内.
1.2 饱和模型
对于式(2)描述的饱和模型,当v(t)=u−和v(t)=u+时,控制的输出u(t)与控制的输入v(t)是不光滑的.这里考虑新的非线性模型去描述饱和特性.给出如下[12]


其中,误差函数erf(·)是连续的微分函数.
图1展示式(6)对平滑输入起到了饱和限制作用.其中,u−=2,u+=2.5,输入为v(t)=5sin(t).对比式(2)和基于误差函数的饱和模型的输出效果.
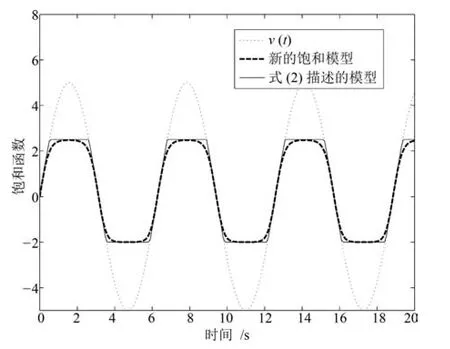
图1 饱和函数Fig.1 Saturation functions
为了便于下面的控制器设计,定义如下函数:

其中c是正常数,u和v是时间的函数.给出的新模型可以表达为

为了控制器设计目的,给出如下假设条件.
1.3 RBF神经网络
RBF神经网络在控制器设计和稳定性证明过程中是一个有用的工具,其被用来逼近未知非线性函数[29].假定存在一个连续函数,在给定的紧集和任意值∈>0,有神经网络,使得∈,其中是神经网络权值,l> 1是神经网络个数.是神经网络输入,是径向基函数,本文选高斯函数,如下:

其中,µi和ηi分别代表神经元中心和高斯函数的宽度.

理想的权重可以表达为

2 神经网络控制器设计及稳定性分析
本部分基于RBF神经网络逼近能力和Lyapunov稳定性理论设计任意切换下的自适应神经网络控制器.
在Backstepping设计过程中,用到虚拟控制函数αi,定义zi=xi−αi,其中α0=yd.
1)考虑z1=x1−yd,z2=x2−α1,及Lyapunov函数

对其求导可得
利用RBF神经网络

式(15)代入到(14)并考虑到z2=x2−α1得
其中,a1,k是常值的设计参数.
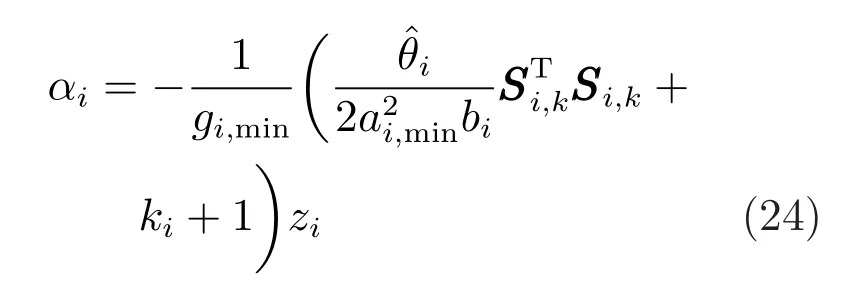
给出如下的虚拟控制
和更新率
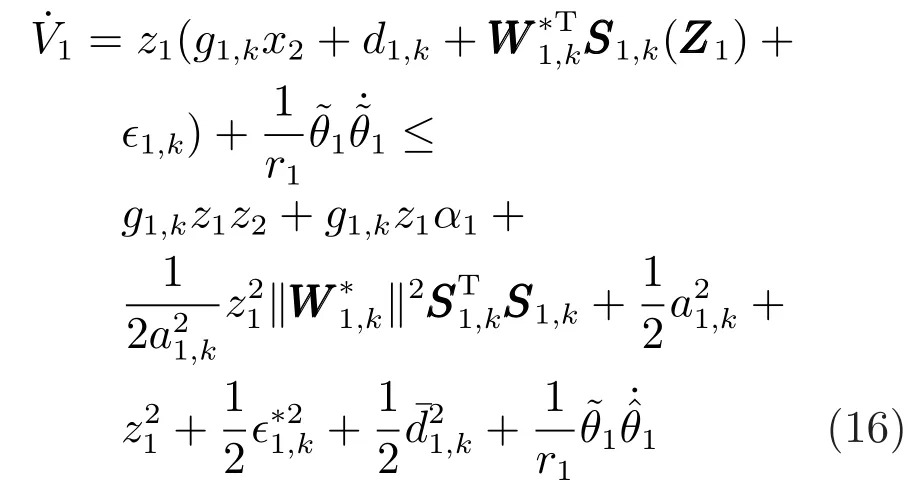
并把式(17)和式(18)代入到式(16)可得

i)假定已经完成了前i−1(2≤i<n)步的计算.参考如下的Lyapunov函数

其中

定义

利用RBF神经网络逼近未知的非线性函数Fi,k

给出如下的虚拟控制
和更新率


最终可得

n)根据如上的演算过程,直接给出Lyapunov函数和控制器设计
更新率

和控制器

对(27)求导并考虑zn=xn−αn−1可得
定义

利用RBF神经网络逼近未知的非线性函数Fn,k

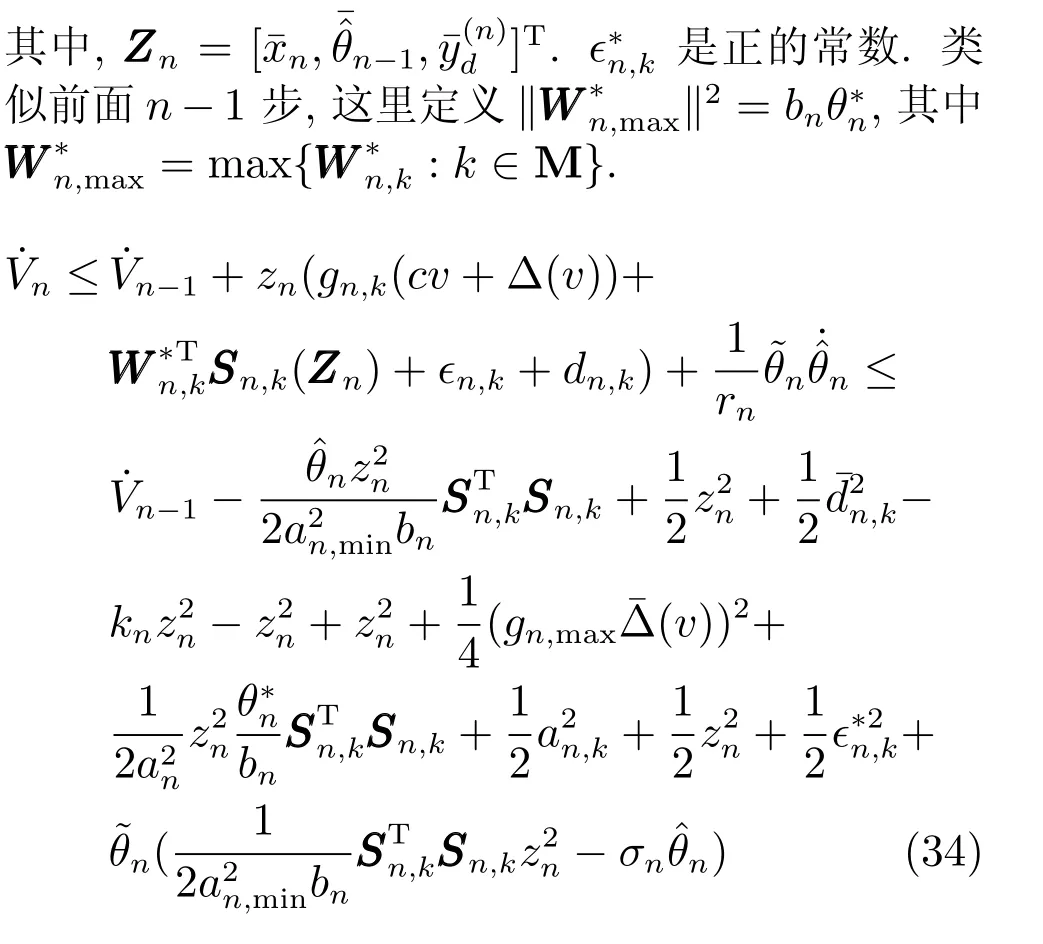
整理可得

利用如下不等式
最终可得

我们有

其中,
为了保证ρ1是正值,需要ki−gi,max> 0,σi> 0,kn−1−gn,max> 0,i=1,2,···,n−1.
定理 1.由被控系统(1),自适应更新率(18),(25)和(28),虚拟控制信号(17)与(24)和控制器(29)构成的闭环系统.对于足够大的紧集,使得对于所有的t≥0,.则对于有界的初始条件,有:
1)对于闭环系统的所有信号都是有界的;2)在有限的时间下,通过选择合适的控制参数,可以保证跟踪误差z1=x1−yd收敛到零的小范围内.
证明. 从式(39)中可以看出

根据不等式(41),表明在闭环系统中的所有信号都是有界的.

即随着t趋近于无穷,有如下的不等式成立
证明过程和上面推导过程类似,这里省略.
3 仿真与验证
这部分利用两个例子验证提出控制器的可行性.
例1. 考虑如下的二阶切换非线性系统
控制输入考虑饱和的非线性特性,参数u−=−9,u+=3.基于设计的控制器,RBF神经网络用来逼近未知的系统动态,RBF神经网络包含53个神经元和包含56个神经元均匀分布在[−2,2]3和[−2,2]6,神经网络间距为1,宽度设为0.95.
虚拟控制函数如下:

其中,g1=1,k1=21.控制器如下:

其中,D=6,k2=3.
仿真结果展示在图2~图7中.图2给出了系统输出y和参考轨迹yd.图3展示了系统输出和参考轨迹的差值,稳定后的跟踪误差在−0.015和0.015之间.图4展示了控制器u的时间轨迹,可以看出饱和特性的输入v在饱和特性下的输出u的效果图.图5和图6显示了自适应控制率的轨迹.图7是用到的随机切换控制信号.仿真结果展示闭环系统中所有信号有界.

图2 跟踪性能Fig.2 Tracking performances
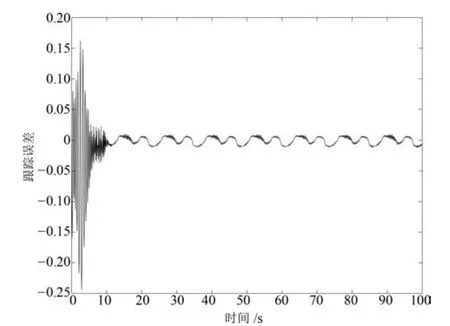
图3 跟踪误差y−ydFig.3 The tracking error y−yd

图4 控制输入Fig.4 Control inputs

图5 自适应更新率Fig.5Response of the adaptive law

图6 自适应更新率Fig.6Response of the adaptive law

图7 切换信号Fig.7 Switching signal
这里主要从更新参数个数、运行时间和跟踪性能方面展示本文提出方法的有效性.借用文献[11−13]控制器设计方法做对比研究,使其跟踪同一参考轨迹yd=sin(t)+sin(0.5t)并且仿真时间统一设定为100s.文献[11]用到了52和33×5的神经元,该方法需要对虚拟控制函数进行微分求解.在本例子中利用设计的控制器可以使得系统跟踪误差收敛到−0.015到0.015之间,而文献[11]的仿真结果显示有大的跟踪误差.文献[12]用到的神经元个数为112和113,文献[13]用到了172和92×17布局的神经网络.而本文是基于输入饱和的任意切换控制,文中设计的控制器只需要两个自适应更新参数ˆθ1,ˆθ2并且最终都收敛到常值附近,最终证明是有界的.而文献[11−13]设计的控制器至少需要l个更新参数(l是神经元个数),因此本文提出的方法避免了过多参数的调节,减轻了运算负荷.与文献[23−27]比较可以看出本文提出的控制器设计可以在有输入受限的条件下实现任意切换控制并保证系统性能.
例2. 考虑带有扰动的双环化学反应器[23]:

控制输入考虑饱和的非线性特性,参数与仿真例1相同,u−=−9,u+=3.其中,r1=5,r2=6,σ1=0.08,σ2=0.1,b1=2,b2=2,a1=1,a2=2.g1=2,k1=25,k1=14.基于设计的控制器,RBF神经网络用来逼近未知的系统动态,RBF神经网络包含53个神经元和包含56个神经元分别均匀分布在[−1.2,1.2]3和 [−1.2,1.2]2× [−1,1]2× [−2,2]2,神经网络间距为1.2,宽度设为1.15.仿真结果展示在图8~图12中.图8给出了系统输出y和参考轨迹yd.图9展示了系统输出和参考轨迹的差值,误差在−0.02到0.02之间并且系统调整时间很短.图10展示了自适应控制率的轨迹.图11给出了饱和特性的输入v和输出u的时间轨迹.图12是随机切换控制信号时间轨迹.从仿真结果可以看出闭环系统所有信号是有界的.

图8 跟踪性能Fig.8 Tracking performance
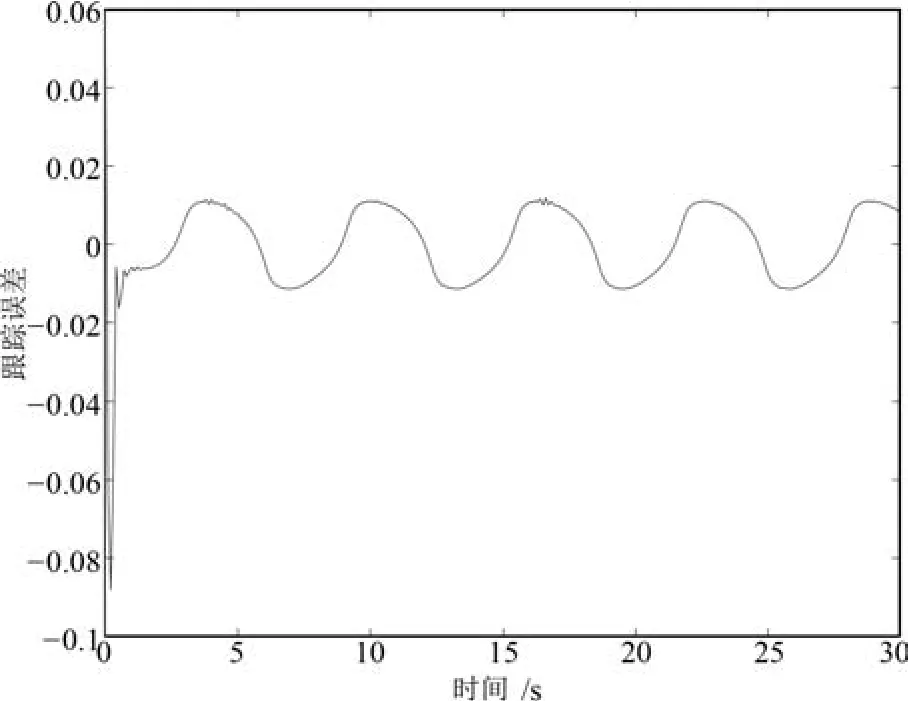
图9 跟踪误差Fig.9 The tracking error
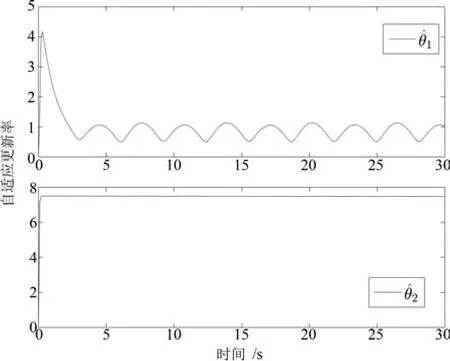
图10 自适应更新率,Fig.10Adaptive laws,
文献[23]采用了相同的双环化学反应器,文献[23]的参考轨迹是以频率为0.0239Hz的正弦信号yd=sin(0.15t),从跟踪效果图可以看出在正弦信号的上下峰值的地方出现比较大的误差并且文献[23]并非采用任意切换信号.本文的参考轨迹频率为的正弦信号,误差在−0.02到0.02之间.
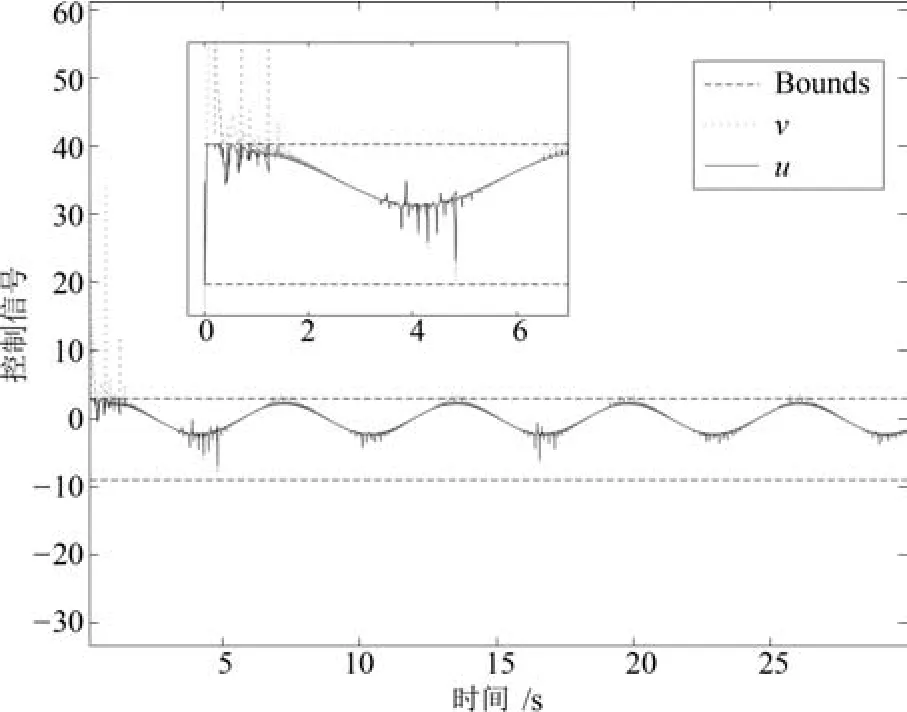
图11 控制输入Fig.11 Control inputs
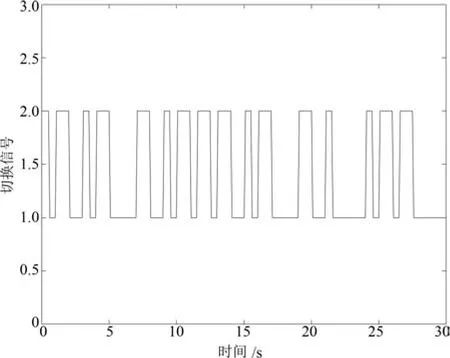
图12 切换信号轨迹σ(t)Fig.12 Trajectory of the switching signal σ(t)
4 结论
本文利用Backstepping方法研究在任意切换情况下的自适应神经网络跟踪控制,系统包含未知扰动和输入不对称饱和,设计了神经网络状态反馈控制器.贡献如下:1)利用高斯误差函数描述一个新的平滑非对称饱和特性,并把Backstepping技术推广应用到一类切换控制问题,涉及到完全未知的系统函数.2)提出的更新率极大减少了计算负担.系统的输入不需要考虑虚拟控制信号的微分形式,减少了计算的复杂度.3)提出的控制器可以使被控制系统在任意切换的情况保证较小的跟踪误差并具有短的调整时间.最终证明设计的神经网络跟踪控制器不仅保证了闭环系统中所有信号有界而且使系统输出误差能收敛到零值小的领域内.下一步工作是开展多输入多输出系统在全状态受限和输出性能约束情况下的任意切换控制.
1 Li Hai-Bo,Chai Tian-You,Zhao Da-Yong.Intelligent switching control of under fl ow slurry concentration and lf owrate intervals in mixed separation thickener.Acta Automatica Sinica,2014,40(9):1967−1975
(李海波,柴天佑,赵大勇.混合选别浓密机底流矿浆浓度和流量区间智能切换控制方法.自动化学报,2014,40(9):1967−1975)
2 Chai Tian-You,Zhang Ya-Jun.Nonlinear adaptive switching control method based on unmodeled dynamics compensation.Acta Automatica Sinica,2011,37(7):773−786
(柴天佑,张亚军.基于未建模动态补偿的非线性自适应切换控制方法.自动化学报,2011,37(7):773−786)
3 Wu J L.Feedback stabilization for multiinput switched nonlinear systems:two subsystems case.IEEE Transactions on Automatic Control,2008,53(4):1037−1042
4 Wu J L.Stabilizing controllers design for switched nonlinear systems in strict-feedback form.Automatica,2009,45(4):1092−1096
5 Ma R C,Dimirovski G M,Zhao J.Backstepping robust H∞control for a class of uncertain switched nonlinear systems under arbitrary switchings.Asian Journal of Control,2013,15(1):41−50
6 Li Jie,Qi Xiao-Hui,Xia Yuan-Qing,Gao Zhi-Qiang.On linear/nonlinear active disturbance rejection switching control.Acta Automatica Sinica,2016,42(2):202−212
(李杰,齐晓慧,夏元清,高志强.线性/非线性自抗扰切换控制方法研究.自动化学报,2016,42(2):202−212)
7 Long F,Fei S M,Fu Z M,Zheng S Y.Adaptive neural network control for switched system with unknown nonlinear part by using backstepping approach:SISO case.Advances in Neural Networks-ISNN 2006.Berlin Heidelberg:Springer-Verlag,2006.842−848
8 Han T T,Ge S S,Lee T H.Adaptive neural control for a class of switched nonlinear systems.Systems&Control Letters,2009,58(2):109−118
9 Li Y M,Tong S C,Li T S.Adaptive fuzzy backstepping control design for a class of pure-feedback switched nonlinear systems.Nonlinear Analysis:Hybrid Systems,2015,16(1):72−80
10 Jiang B,Shen Q K,Shi P.Neural-networked adaptive tracking control for switched nonlinear pure-feedback systems under arbitrary switching.Automatica,2015,61:119−125
11 Ge S S,Wang C.Direct adaptive NN control of a class of nonlinear systems.IEEE Transactions on Neural Networks,2002,13(1):214−221
12 Ma J J,Ge S S,Zheng Z Q,Hu D.Adaptive NN control of a class of nonlinear systems with asymmetric saturation actuators.IEEE Transactions on Neural Networks and Learning Systems,2015,26(7):1532−1538
13 Wang M,Wang C.Learning from adaptive neural dynamic surface control of strict-feedback systems.IEEE Transactions on Neural Networks and Learning Systems,2015,26(6):1247−1259
14 He W,Chen Y H,Yin Z.Adaptive neural network control of an uncertain robot with full-state constraints.IEEE Transactions on Cybernetics,2016,46(3):620−629
15 Li D J.Neural network control for a class of continuous stirred tank reactor process with dead-zone input.Neurocomputing,2014,131:453−459
16 Al Janaideh M,Rakheja S,Su C Y.A generalized Prandtl-Ishlinskii model for characterizing the hysteresis and saturation nonlinearities of smart actuators.Smart Materials and Structures,2009,18(4):045001
17 Zhao W,Ren X M,Gao X H.Synchronization and tracking control for multi-motor driving servo systems with backlash and friction.International Journal of Robust and Nonlinear Control,2016,26(13):2745−2766
18 Liu Z,Chen C,Zhang Y.Decentralized robust fuzzy adaptive control of humanoid robot manipulation with unknown actuator backlash.IEEE Transactions on Fuzzy Systems,2015,23(3):605−616
19 Hu Zhou,Wang Zhi-Sheng,Zhen Zi-Yang.Nonlinear information fusion control for underactuated cranes with input saturation.Acta Automatica Sinica,2014,40(7):1522−1527
(胡洲,王志胜,甄子洋.带输入饱和的欠驱动吊车非线性信息融合控制.自动化学报,2014,40(7):1522−1527)
20 Li Y M,Tong S C,Li T S.Adaptive fuzzy output-feedback control for output constrained nonlinear systems in the presence of input saturation.Fuzzy Sets and Systems,2014,248:138−155
21 Wang H Q,Chen B,Liu X P,Liu K F,Liu C.Adaptive neural tracking control for stochastic nonlinear strict-feedback systems with unknown input saturation.Information Sciences,2014,269:300−315
22 Sui S,Tong S C,Li Y M.Adaptive fuzzy backstepping output feedback tracking control of MIMO stochastic purefeedback nonlinear systems with input saturation.Fuzzy Sets and Systems,2014,254:26−46
23 Zhang L L,Yang G H.Dynamic surface error constrained adaptive fuzzy output feedback control for switched nonlinear systems with unknown dead zone.Neurocomputing,2016,199:128−136
24 Zhao X D,Shi P,Zheng X L,Zhang L X.Adaptive tracking control for switched stochastic nonlinear systems with unknown actuator dead-zone.Automatica,2015,60:193−200
25 Niu B,Li L.Adaptive neural network tracking control for a class of switched strict-feedback nonlinear systems with input delay.Neurocomputing,2016,173:2121−2128
26 Tong S C,Sui S,Li Y M.Observed-based adaptive fuzzy tracking control for switched nonlinear systems with deadzone.IEEE Transactions on Cybernetics,2015,45(12):2816−2826
27 Yin S,Yu H,Shahnazi R,Haghani A.Fuzzy adaptive tracking control of constrained nonlinear switched stochastic pure-feedback systems.IEEE Transactions on Cybernetics,2017,47(3):579−588,DOI:10.1109/TCYB.2016.2521179
28 Wu J,Su B Y,Li J,Zhang X,Ai L F.Global adaptive neural tracking control of nonlinear MIMO systems.Neural Computing and Applications,2016,DOI:10.1007/s00521-016-2268-x
29 Sanner R M,Slotine J J E.Gaussian networks for direct adaptive control.IEEE Transactions on Neural Networks,1992,3(6):837−863
30 Wang H Q,Chen B,Liu K F,et al.Adaptive neural tracking control for a class of nonstrict-feedback stochastic nonlinear systems with unknown backlash-like hysteresis.IEEE Transactions on Neural Networks and Learning Systems,2014,25(5):947−958

司文杰 华南理工大学自动化科学与工程学院博士后.主要研究方向为自适应控制,确定学习和故障诊断.本文通信作者.E-mail:mesiwenjie@scut.edu.cn
(SIWen-Jie Post-doctor at the School of Automation Science and Engineering,South China University of Technology.His research interest covers adaptive control,deterministic learning and fault diagnosis.Corresponding author of this paper.)

董训德 华南理工大学自动化科学与工程学院助理研究员.主要研究方向为系统识别,动态模式辨识和确定学习理论研究.E-mail:audxd@scut.edu.cn
(DONG Xun-De Assistant professor at the School of Automation Science and Engineering,South China University of Technology.His research interest covers system identi fi cation,dynamical pattern recognition and deterministic learning theory.)

王 聪 华南理工大学自动化学院教授.主要研究方向为非线性系统自适应神经网络控制与辨识,确定学习理论,动态模式识别,基于模式的智能控制,振动故障诊断及在航空航天,生物医学工程等领域的应用.
E-mail:wangcong@scut.edu.cn
(WANGCong Professor at the School of Automation,South China University of Technology.His research interest covers adaptive neural network control and identi fi cation of nonlinear systems,deterministic learning theory,dynamical pattern recognition,pattern-based intelligent control,oscillation fault diagnosis,and applications in aerospace and biomedical engineering.)
Adaptive Neural Tracking Control Design for a Class of Uncertain Switched Nonlinear Systems with Input Saturation
SI Wen-Jie1DONG Xun-De1WANG Cong1
This paper deals with tracking control for a class of single input and single output(SISO)uncertain strictfeedback switched nonlinear systems with input asymmetric saturation actuator,unknown external disturbance and arbitrary switchings.Firstly,Gaussian error function is employed to represent a novel continuous di ff erentiable asymmetric saturation model.Secondly,by employing radial basis function neural network(RBF NN),unknown functions are approximated.At last,a state-feedback controller is constructed by using common Lyapunov function method.The designed controller decreases the number of learning parameters,thus reduces the computational burden.The designed statefeedback controller is shown to be able to guarantee that all the signals in the closed-loop system are semi-globally uniformly ultimately bounded(SGUUB)and the tracking error converges to a small neighborhood of the origin.Two simulation examples are presented to show the e ff ectiveness of the proposed approach.
Switched nonlinear systems,common Lyapunov function,asymmetric saturation,adaptive backstepping
May 4,2016;accepted October 9,2016
司文杰,董训德,王聪.输入饱和的一类切换系统神经网络跟踪控制.自动化学报,2017,43(8):1383−1392
Si Wen-Jie,Dong Xun-De,Wang Cong.Adaptive neural tracking control design for a class of uncertain switched nonlinear systems with input saturation.Acta Automatica Sinica,2017,43(8):1383−1392
2016-05-04 录用日期2016-10-09
国家重大科研仪器研制项目(61527811)资助
Supported by National Research and Development Program for Major Research Instruments(61527811)
本文责任编委孙希明
Recommended by Associate Editor SUN Xi-Ming
1.华南理工大学自动化科学与工程学院广州510640
1.School of Automation Science and Engineering,South China University of Technology,Guangzhou 510640
DOI10.16383/j.aas.2017.c160372
