基于贝塞尔轨迹的视觉导引AGV路径跟踪研究
2017-09-11刘海芹
刘海芹
(聊城大学东昌学院数学与信息工程系,山东聊城252000)
基于贝塞尔轨迹的视觉导引AGV路径跟踪研究
刘海芹
(聊城大学东昌学院数学与信息工程系,山东聊城252000)
为提高视觉导引自动导引车(automatic guided vehicle,AGV)路径跟踪精度,提出一种基于贝塞尔轨迹的精确路径跟踪算法。该算法首先将采集的多种路径特征图像进行预处理得到形状信息,训练SVM多层路径形状特征分类器;然后根据命令,改变AGV采集到的分支路径图像的权重,迭代计算所选择路径的若干最小内接圆;最后,利用最小二乘规则,将最小内接圆的圆心拟合成贝塞尔轨迹,实现AGV的精确路径跟踪。将该算法应用于视觉引导AGV中,并进行路径特征的在线识别和轨迹跟踪实验。结果表明:路径特征的识别准确率为99.7%以上,识别时间约为22ms,弯道轨迹跟踪准确度为20mm和20°;与传统方法相比,该方法显著提高路径特征识别和轨迹跟踪的准确率,更能满足工业现场需求。
视觉导引;自动导引车;贝塞尔轨迹;轨迹跟踪;支持向量机
0 引言
自动导引车(automated guided vehicle,AGV)是自动化生产线、柔性制造、智能仓储物流系统的关键设备之一[1-4]。其中,通过配置视觉测量系统的视觉导引AGV因其具备更高的导引精度和信息获取能力,已在近年来获得了更广泛的工程应用。
目前,视觉导引AGV一般使用RFID或其他标志物来识别不同种类的路径[5-6]。为了改善柔性识别水平,喻俊等[7]使用支持向量机完成了对L型、T型和十字型的识别。但在工程上,L型导引路径效率较低,不适用于圆弧等特征模糊的路径识别。为了改善识别效率,张建鹏等[8]使用KPCA方法对路径特征进行降维,并通过神经网络法对降维的路径特征进行识别。然而,实际上,降维后的路径识别率较低。高国琴等[9]使用K-means算法识别温室移动机器人的路径,但是在多分支路径的识别问题上,其鲁棒性较差。
为了提高视觉导引AGV对不同种类路径的轨迹跟踪精度,本文提出一种基于贝塞尔轨迹的精确路径跟踪方法。首先,利用AGV视觉系统采集6类路径的训练样本,预处理后得到形状信息,训练CART决策树SVM路径分类器;其次,创建两个线程,一个用于路径的在线识别和跟踪,另一个用来在线训练SVM分类器。然后,AGV根据命令需要选择不同的动作时,改变需要选择的路径的权重,迭代计算所选择路径的所有最小内接圆。因为贝塞尔曲线具有连续及光滑等良好的几何属性,使用贝塞尔曲线规划AGV的导引轨迹能够满足曲率连续和最大曲率限制的约束,可以保证AGV满足运动学约束、为了满足运动学约束、初始状态约束、目标状态约束以及曲率连续约束,可以在AGV跟踪多分支路径时,实时优化平滑轨迹,可以提高AGV工作的稳定性,以及降低不确定延时[10-11]。所以在最小二乘规则的基础上,将最小内接圆的圆心拟合为一条贝塞尔轨迹,通过运动控制算法实现AGV的准确轨迹跟踪。最后通过自制的视觉引导AGV验证了本文算法的有效性。
1 贝塞尔轨迹跟踪流程
首先,采集不同种类路径作为训练样本,预处理后使用SURF算法提取路径特征,将特征样本聚类后,训练多层SVM路径分类器,如图1中虚线所示。初始化路径特征识别器,为其分配两个线程,分别负责在线训练分类器和在线识别路径。
其次,在视觉导引AGV的工作过程中,使用CCD相机实时采集的图像,利用Canny算法提取在线采集到的路径图像形状特征,利用多线程技术,使用训练好的多层SVM分类器进行路径种类识别的同时,使用在线图像保持多层SVM路径特征分类器在线训练,如图1中实线所示。
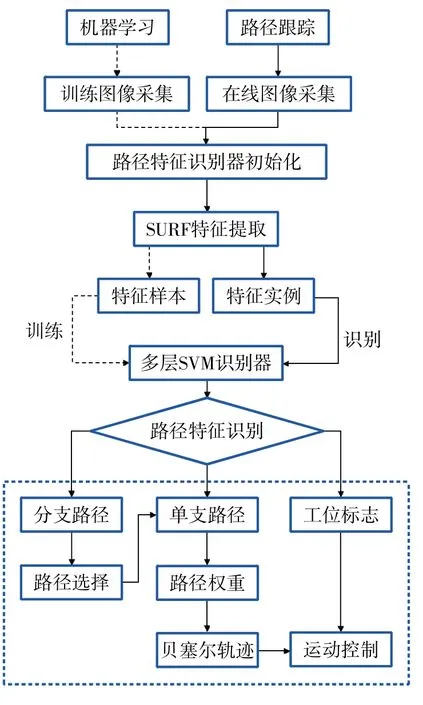
图1 视觉导引流程
最后,根据路径的种类通过指令选择不同的动作,提高所选择的路径权重,离散得到若干最小内接圆的重心。利用贝塞尔曲线将最小内接正方形的重心拟合为一条最小二乘误差的贝塞尔轨迹,进行运动控制。
2 路径图像特征识别
2.1 路径图像预处理
工业现场中,曲线转弯比直角转弯具有更高的工作效率,针对常见的视觉导引路径,将直线路径归纳为2类:直线和十字工位,将曲线多分支路径归纳为4类:直-左、直-右、左-右和左-直-右,分别如图2所示。
因为黑色和白色的对比度较高,所以在白色地面上使用黑色胶带铺设6种不同的路径。为不同类别的路径设置不同的索引,根据不同类别路径的特征复杂程度,直线和十字工位结构简单均采集80组样本,其余4种路径结构较为复杂,分别采集100,100,120,120组样本数据,如表1所示。
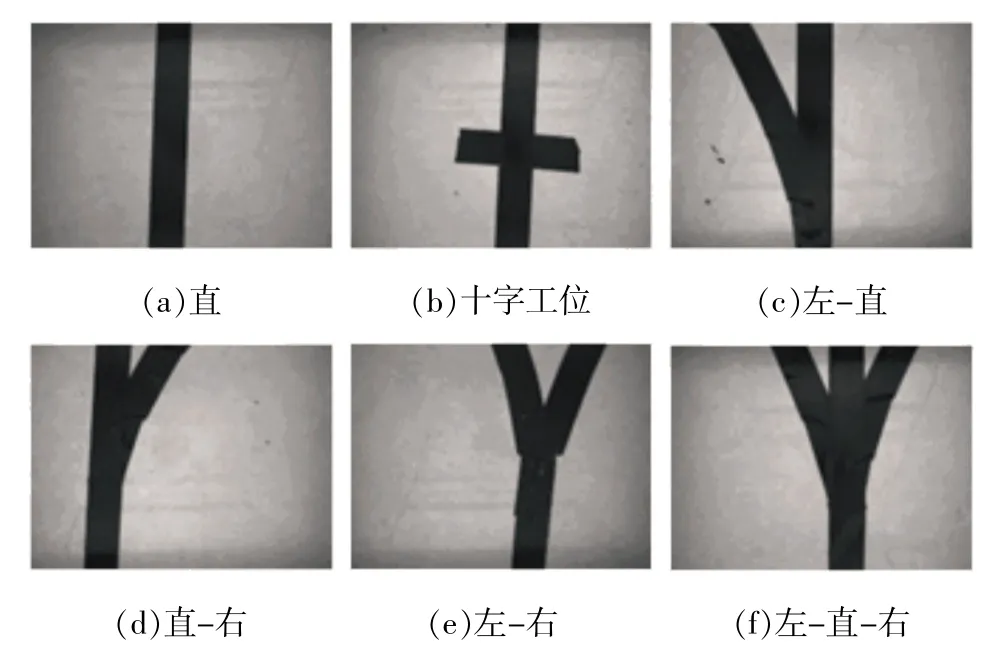
图26 种类别路径
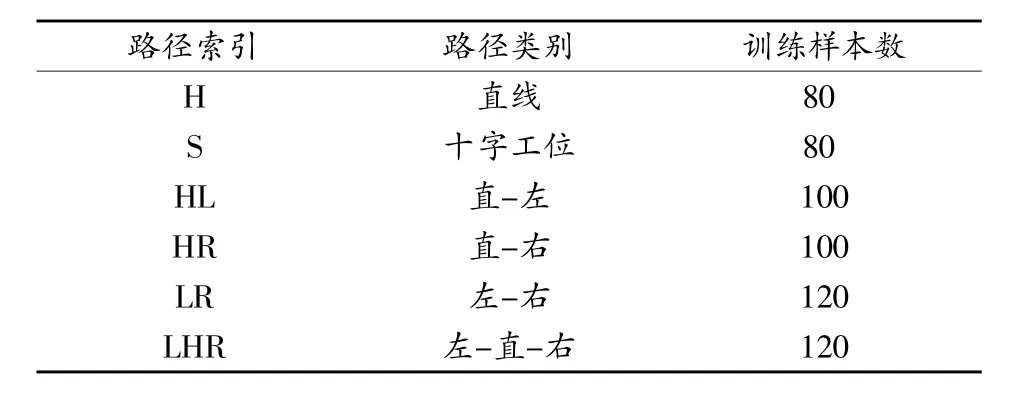
表16 种路径索引及样本数
相机在获取目标图像时,由于光敏元件的颗粒性,以及图像传感器存在分辨率降低和定量的问题,图像将会存在噪声。因此,首先使用15×15模板,对得到的二值路径特征图像进行一次腐蚀运算,消除毛刺,平滑图像轮廓;再使用10×10模板,对平滑后的图像进行一次膨胀运算,填充细小孔洞,完成预处理。
2.2 路径特征提取
常用的图像特征提取方法有SIFT[12]和SURF[13],但是通常都比较耗时,实时性较差。而且本文归纳的6类路径特征模型主要为形状上的差异,所以本文提取经过预处理的路径图像的形状特征,通过多层SVM路径特征分类器进行识别。
在腐蚀和膨胀操作的基础上,检测路径图像边缘,提取形状特征。本文选用Canny算法进行边缘检测,只要指定合适的双阈值,Canny算法就可以生成高质量的轮廓。分析路径图像的灰度直方图,如图3所示。
路径灰度图像是明显的双峰直方图的图像,使用双峰的灰度值作为Canny算法的双阈值通常可以得到比较好的边缘检测效果。所以选用一个10×10的圆形模板,从两端迭代至谷底检测灰度直方图的双峰为

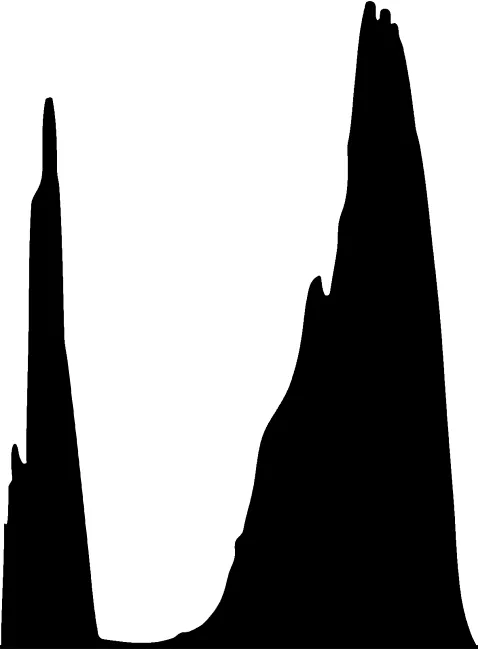
图3 双峰灰度直方图
式中ui为路径图像灰度为i的像素个数,ul和uh分别为双峰低阈值和高阈值,将得到的双峰灰度值带入Canny算法:

得到图4所示的路径轮廓图像。

图46 类路径形状特征
提取表1中路径图像训练样本的路径形状特征,训练多层SVM分类器,用作路径种类识别。
2.3 基于SVM的路径特征识别
为了提高路径特征的识别精度,本文选用CART决策树实现SVM多分类;同时,为了避免过拟合,采用悲观剪枝策略,当子树的误判个数大于对应叶子节点的误判个数一个标准差后,就决定剪枝,即:

其中:

E(substree)和var(substree)为该树的误判次数均值和标准差。

E(leaf)为叶子节点的误判次数均值。将路径特征相似度归一化,得到如图5所示的路径种类匹配结果。
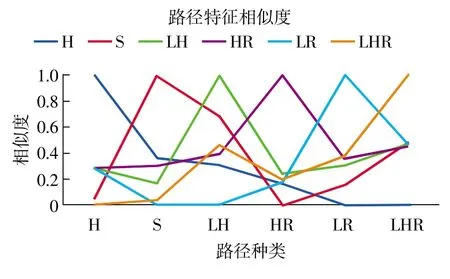
图5 路径种类匹配结果
图中横轴为路径种类,不同颜色的折线为测试的路径种类,可见,SVM分类器可以实现对路径形状的正确识别。
3 贝塞尔轨迹精确路径跟踪
当工业摄相机采集到多分支路径时,根据指令选取其中一只路径进行跟踪。路径的自动选取可以通过改变不同分支路径的权重来实现,如图6所示。
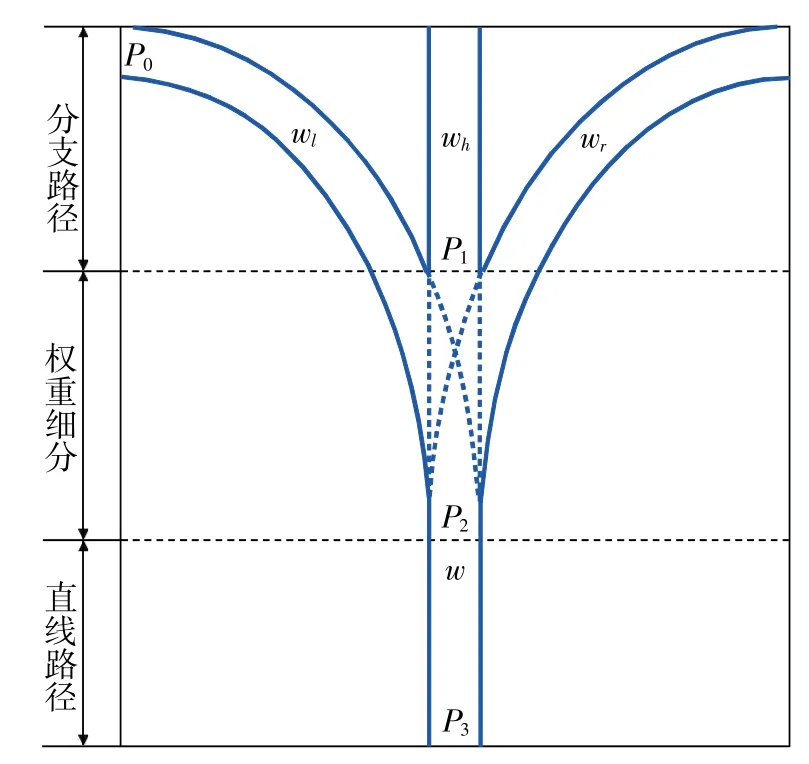
图6 分支路径权重模型
以LHR类型路径为例,将路径形状图像分为3部分:分支路径、权重细分和直线路径,分支路径和权重细分部分L、H和R分支的权重分别为wl、wh、wr,直线路径部分权重均为w,路径权重计算公式为

根据指令,将3个分支权重值的其中两个置位0,可以得到AGV需要跟踪的轨迹。为了提高路径跟踪的精度,将权重轨迹拟合成一条可以反映AGV位姿偏差的直线,对权重轨迹进行迭代求取最小内接圆。为了保证转向机构可行,满足速度连续约束、加速度连续约束、加速度有界约束以及目标状态侧滑约束,采用由2个参数确定的三阶贝塞尔曲线规划出曲率变化最小的轨迹。根据最小二乘规则,计算另外2个控制点,将若干最小内接圆的圆心拟合成一条三阶贝塞尔曲线,为AGV提供纠偏信息。三阶贝塞尔曲线公式如下:

式中Pk为三阶贝塞尔曲线的4个控制点,在路径图像与图像窗口的交线上,如图6中所示P0~P3,已知最小二乘规则为

式中:f(x¯i)——拟合三阶贝塞尔曲线;
yi——最小内接圆圆心。
根据最小二乘规则迭代得到P1和P2使Δ最小,分别得到LHR路径L、H和R方向的轨迹如图7所示。
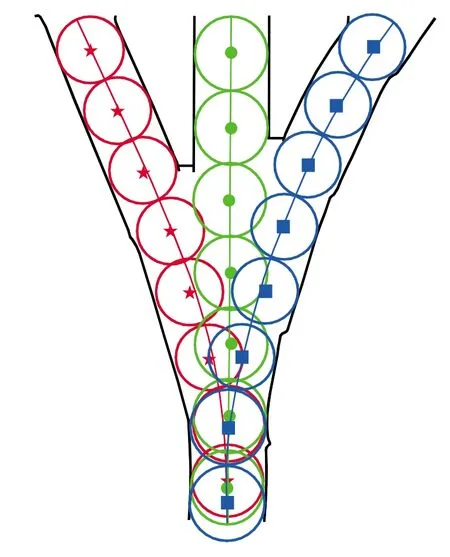
图7 最小二乘贝塞尔轨迹
图中红色、绿色、和蓝色的线分别代表L、H和R方向的轨迹。
4 实验验证与分析

图8 自研AGV实物
为了验证基于决策树SVM的识别方法对视觉导引AGV导引路径的识别能力,研制了一台差速转向式AGV,如图8所示。
该AGV驱动轮位于后桥,工业摄相机安装在前桥上方,使工业摄相机在得到路径特征后,车载控制系统有足够的时间对其进行分类,提高AGV在路径选择上的鲁棒性。另外,将本文的基于决策树SVM路径形状识别方法分别与文献[7]和文献[8]的识别方法进行了比对研究;同样,分别使用文献[7]和文献[8]中方法对表1中的样本进行训练,得到训练后的对比测试数据,如表2所示。
由于直线和十字工位的特征比较明显,所以分别经过80个样本训练后,已经可以达到100%的识别率。LH和HR与LR和LHR特征存在类似的关系,且由于AGV车体的倾斜,工业摄相机存在曲线漏采集的情况,所以识别率约为95%。LR和LHR特征不仅与LH和HR特征相似,二者之间也存在着相似关系,且在采集图像的过程中,容易将这两种特征截断成其他特征,识别率仅为91.67%。但识别时间为27 ms,低于文献[7]的51 ms,远低于文献[8]的97 ms;同时,识别率高于文献[7]的73.4%和文献[8]的85.9%。

表2 特征识别结果对比
使分类器保持在线训练1h,得到各算法的识别时间和识别准确率,如图9所示。

图9 在线训练结果
可以看出,AGV自主运行15 min后,路径的识别率达98%,识别时间降低为22 ms;当AGV自主运行50 min后,路径的识别率达99.73%,识别时间小于21ms,进一步降低识别时间;当AGV自主运行1 h后,路径的识别率接近100%,识别时间在23ms左右。而文献[8]的方法虽然实时性较好,但其鲁棒性较差,文献[9]的方法实时性较差。因此,本文方法更满足工业现场的测试要求。
以图7中的LHR类型路径为例,验证本文基于贝塞尔轨迹的AGV精确路径跟踪方法,得到如图10所示L、H、R分支的横向和航向轨迹跟踪偏差数据。
图10(a)、图10(b)、图10(c)分别代表AGV在进入LHR类型路径后,分别选择L、H、R分支的轨迹跟踪精度,整个AGV的转向过程约为100帧。由图10可知,AGV在选择H路径进行跟踪时,精度最高,横向偏差可达±4mm,航向偏差仅为±2°。当选择L或R路径进行跟踪时,随着AGV进入弯道,车体相对导引轨迹的偏差增大,跟踪精度降低,这很大程度上是因为拟合贝塞尔轨迹,并进行位姿纠偏时造成的偏差。由于AGV的工业摄像机位于前桥,当AGV采集到分支路径,进行权重细分,拟合贝塞尔轨迹时,其车体中心仍在直线路径上,相当于输入了一个AGV位姿偏差的阶跃信号,同时由于AGV的驱动轮和工业摄像机均不在车体中心,会增加AGV位姿纠偏输出量的幅度,降低位姿偏差消除快速性与稳定性。所以当AGV进行L或R路径跟踪时最大跟踪横向偏差绝对值约为20 mm,航向偏差绝对值约为20°。

图10 LHR型路径跟踪精度曲线
5 结束语
1)为提高AGV对不同种类路径的识别精度,提出了一种基于SVM的路径特征形状的识别方法。在线训练1h以后识别准确率接近100%,识别时间接近20ms,显著的提升了路径识别的准确率和识别时间。
2)针对分支路径的轨迹跟踪问题,提出了基于分支轨迹最小内接圆拟合贝塞尔轨迹的方法,有效的提高了AGV的轨迹跟踪精度。L、R路径的跟踪精度绝对值可以达到20 mm、20°,H路径的跟踪精度绝对值可以达到4mm和2°,满足工业现场的需求。
3)由于自制的AGV工作速度为0.3m/s,采集到的路径图像或样本数据模糊程度均不严重,当AGV运行速度过快时可能会影响路径识别精度。因此,下一步工作希望AGV在较高速度下工作时也可以保证轨迹的识别和跟踪精度。
[1]张建鹏,楼佩煌,钱晓明,等.多窗口实时测距的视觉导引AGV精确定位技术研究[J].仪器仪表学报,2016,37(6):1356-1363.
[2]陈无畏,孙海涛,李碧春,等.基于标识线导航的自动导引车跟踪控制[J].机械工程学报,2006,42(8):164-170.
[3]朱从民,黄玉美,上官望义,等.AGV多传感器导航系统研究[J].仪器仪表学报,2008,29(11):2419-2423.
[4]DRAGANJAC I,MIKLIC D,KOVACIC Z,et al.Decentralized control of multi-AGV systems in autonomous warehousing applications[J].IEEE Transactions on Autom ation Science&Engineering,2016,13(4):1433-1447.
[5]LU S,XU C,ZHONG R Y.An active RFID tagenabledlocatingapproachwithmultipatheffect elimination in AGV[J].IEEE Transactions on Automation Science&Engineering,2016,13(3):1-10.
[6]周家玮,张光新,蔡晋辉,等.用于自动导引车辆的数字工位实时识别系统设计[J].江南大学学报(自然科学版),2008,7(2):141-145.
[7]喻俊,楼佩煌,武星,等.基于粗糙集和分层支持向量机的AGV多分支路径识别[J].南京航空航天大学学报(社科版),2013,45(1):62-69.
[8]武星,沈伟良,楼佩煌,等.视觉导引AGV鲁棒特征识别与精确路径跟踪研究[J].农业机械学报,2016,47(7):48-56.
[9]高国琴,李明.基于K-means算法的温室移动机器人导航路径识别[J].农业工程学报,2014,30(7):25-33.
[10]陈成,何玉庆,卜春光,等.基于四阶贝塞尔曲线的无人车可行轨迹规划[J].自动化学报,2015,41(3):486-496.
[11]余伶俐,龙子威,周开军.基于贝塞尔曲线的机器人非时间轨迹跟踪方法[J].仪器仪表学报,2016,37(7):1564-1572.
[12]刘佳,傅卫平,王雯,等.基于改进SIFT算法的图像匹配[J].仪器仪表学报,2013,34(5):1107-1112.
[13]BAY H,ESS A,TUYTELAARS T,et al.Speeded-Up robust features[J].Computer Vision&Image Understanding,2008,110(3):404-417.
(编辑:刘杨)
Research on path tracking of visual navigation AGV based on Bessel trajectory
LIU Haiqin
(Department of Mathematics and Information Engineering,Dongchang College of Liaocheng University,Liaocheng 252000,China)
To increase path tracking accuracy of visual navigation AGV(automatic guided vehicle),a precise path tracking algorithm based on Bessel trajectory is proposed.Firstly,the algorithm will pre-process the collected feature images of various paths to obtain shape information,and train the SVM multi-path shape feature classifier,and then change the weight of the branch paths of the collected images and iteratively calculate the minimum inscribed circles of the selected paths according to the order.Finally,based on the least squares rule,the centre of the minimum inscribed circle will be fitted into the Bessel trajectory to realizing the precise path tracking of AGV.The algorithm was applied in visual navigation AGV and on-line recognition and trajectory tracking test of path features were carried out and the results shown that the recognition accuracy of path features is up to 99.7%,and the recognition time is about 22 ms,curve trajectory tracking accuracy is 20 mm and 20°.Comparing with the traditional method,the method can improve the accuracy rate of path recognition and path tracking,which meets industrial field applications.
visual navigation;AGV;Bessel trajectory;path tracking;SVM
A
1674-5124(2017)08-0113-06
2017-04-05;
2017-05-10
刘海芹(1979-),女,山东聊城市人,讲师,硕士,研究方向为机器视觉、计算机网络与安全、计算机软件与应用。
10.11857/j.issn.1674-5124.2017.08.023