基于SLAM的移动测量系统在室内空间数据采集中的应用研究
2017-09-09刘刚
刘刚

DOI:10.16661/j.cnki.1672-3791.2017.22.001
摘 要:该文初步讨论了室内移动测量系统IMS3D的特点,对室内环境进行数据采集测试,分析了测试数据的精度,总结了外业和内业处理的方法与流程,并提出了该系统的质量控制与检核的初步方案。
关键词:SLAM 移动测量 精度 室内
中图分类号:TP391 文献标识码:A 文章编号:1672-3791(2017)08(a)-0001-03
地下空间在改善城市环境、扩大城市容量方面有着独特的优势和潜力,如何采用最新的设备和技术高效准确的采集地下空间数据,为地下空间后续开发利用和管理提供数据基础,是当前急需解决的问题。随着BIM的研究和应用,室内移动测量的需求大幅增长,传统的测量方法无法满足新兴的需求,因此出现了动态扫描系统的解决方案。该文介绍了利用华泰天宇基于SLAM的室内移动测量系统IMS3D进行泛室内空间数据采集的情况,通过大尺度场景试生产,分析其数据采集的精度,研究其数据采集的作业流程及质量控制,总结了该系统用于生产的初步方案。该文的研究内容对解决当前室内空间数据采集效率低的瓶颈,开拓新的测绘市场和业务具有重要意义。
1 SLAM概述
近年来,实时定位和建图SLAM系统(Simultaneous Localization And Mapping)在人工智能领域得到广泛应用,随着谷歌的Mango、微软的Hololens,以及MagicLeap等现象级产品以及开源算法库的推出,SLAM技术发展越来越快,掀起了一阵热潮。SLAM源自于计算机视觉CV(Computer View),最早由Hugh Durrant-Whyte和John J.Leonard提出。
定位和构图是人工智能的核心问题之一,SLAM问题可以表述为:机器人在未知环境中从一个未知位置开始移动,在移动过程中根据位置估计和地图进行自身定位,同时在自身定位的基础上建造增量式地图,实现机器人的自主定位和导航。
在测绘领域中,一般先通过GNSS方法获得精确的位置即定位,然后根据定位准确的采集周围环境数据即建图;也可以利用周围环境中的已知数据后方交会获得位置数据,无论是哪种情况,要么是需要精确的位置;要么是需要精确的地图。SLAM目标就在于在误差最小化的约束条件下,同时(实时)定位并建图,使用多传感器集成的SLAM系统解决因室内GNSS信号衰弱无法准确定位问题。
2 i-MMS系统介绍
i-MMS系统是法国Viametris(国内由华泰天宇做应用推广)推出的室内移动测量系统,IMS3D为该公司推出的三维扫描产品,这款系统的扫描端是由1个横置和2个竖置的Hokuyo激光雷达组成,横置激光雷达扫描平面数据,左边竖置的扫描上方数据,右边竖置的扫描下方数据,它们的扫描视角为270°,全景相机使用LayBug三组镜头。IMS3D添加了IMU,可以提高匹配效率,解决高差或是台阶问题,该SLAM系统小型化,整机质量下降,使用便捷。
3 数据试生产及分析
3.1 试生产基本情况
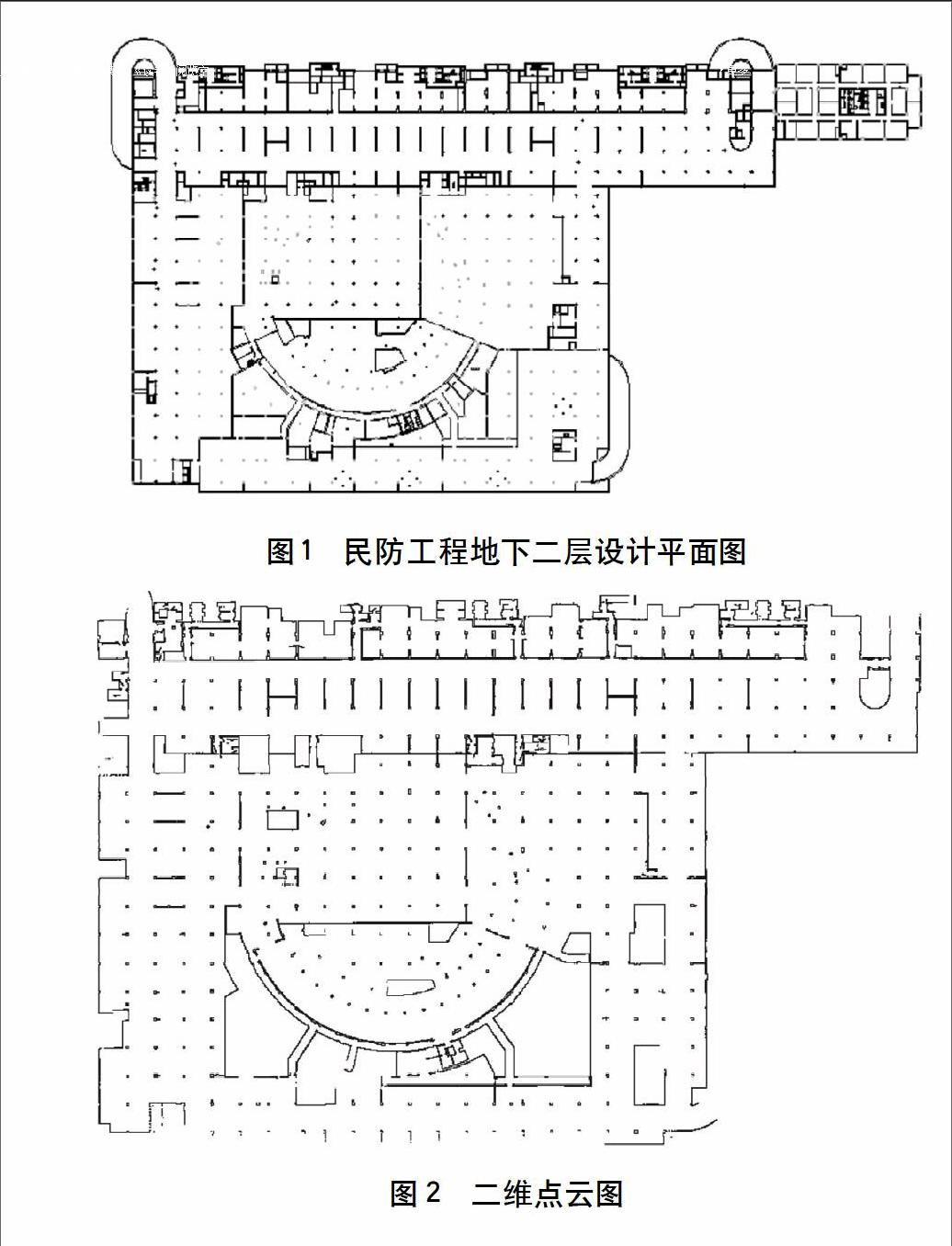
某民防工程的地下空间位于上海市闵行区浦江镇江月路(近浦申路),地下共有两层,地下一层为停车库,建筑面积约30 000 m2,地下二层为停车库与民防工程相结合,建筑面积约35 000 m2,整个车库南北长约160 m,东西长约180 m,如图1所示。
利用IMS3D系统对该项目地下二层进行扫描,同时通过全站仪自由设站方法采集一定数量的散点(143点),作为质量检核及控制;另外使用钢尺采集了大量的边长尺寸作为检核数据。
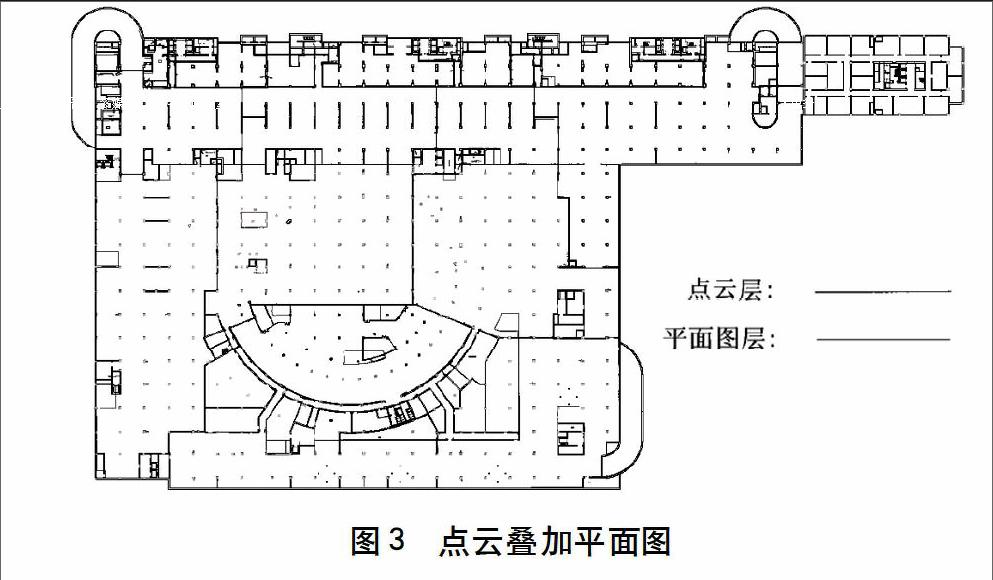
IMS3D系统扫描的二维点云图如图2所示,简单的看几乎所有的基本轮廓都很好的扫描出来,数据细节还需要进一步分析;为了制作矢量图需要对图2进行进一步的人工跟踪,得到点云跟踪数据,它可以作为该项目的基础作业图纸,所有的编辑作业、精度对比等工作都可以围绕点云跟踪数据展开;图3将平面数据叠加至点云数据上,简单直观的比较平面图和二维点云图。由图3可知,点云和平面图基本一致,但是在局部区域仍然存在区别,这是因为平面图设计和现场实际情况不吻合的缘故。
使用全站仪和钢尺采集了现场一定数量的点以及边长,这些点主要用来核对边长以及点位精度。这些点位按照一定的原则进行选取,诸如点位均匀分布在整个轮廓内、用来检核的边长既有长边也有短边,此外为了控制误差,尽量控制全站仪的设站数量,并且使用钢尺量测了相应的边长。
3.2 试生产效率分析
IMS3D方法和传统方法效率比对如表1所示。使用IMS3D系统相对效率更高,尤其是外业采集数据速度快,对于大尺度環境,点云解算时间和跟踪矢量化时间较长。尽管如此,IMS3D系统的效率明显更高。
3.3 试生产精度分析
点位精度的检核首先需要将点云数据和全站仪实测数据置于统一的坐标系统框架之下,首先在全站仪实测数据和点云跟踪数据中合理选取相对应的一条长边,然后通过旋转、平移将两份数据置于统一框架下。该方法的前提是假设全站仪采集数据方法不会引入较大误差,在试生产中尽管通过简单的限制设站数来减小误差传播,但是由于地下空间的条件限制以及仪器的对中整平等都会影响该假设的成立。另外无论是将两组数据置于统一框架下还是点云跟踪都会引入较大的系统性偏差,因此关于点位精度的对比仅仅作为参考。
3.3.1 坐标比对
此次共统计了84个对应的点坐标,坐标差最大值为12.9 cm,平均值为5.47 cm。点位较差统计结果见表2。点位较差主要来源于点云跟踪矢量化误差,IMS3D采集数据误差、全站仪采集数据误差以及将数据置于统一框架下引入的偏差。点云的切片宽度约为3 cm,因此理论上点云跟踪引入的误差大约为4.2 cm。单以该次试生产数据为参考,点位偏差的样本均方差大概为6 cm左右,而偏差超过10 cm的点位很难确认是由于那种误差来源引起,需要进一步分析。endprint
