“电气传动”课程设计教学内容改革
2017-09-08潘月斗
潘月斗, 陈 涛
(北京科技大学 自动化学院, 北京 100083)
“电气传动”课程设计教学内容改革
潘月斗, 陈 涛
(北京科技大学 自动化学院, 北京 100083)
以模拟电路控制直流调速系统为背景的“电气传动”课程设计传统教学内容已不再符合教学要求,因此需要对其进行改革。本文以数字直流双闭环调速系统为例,阐述了直流双闭环调速系统的数字化设计方法。实践表明,以数字直流双闭环调速系统设计为教学内容开展“电气传动”课程设计的改革,可以使学生更快地学习和掌握当前电机调速的新技术和新方法,同时培养了学生的创新思维能力和实践动手能力。
电气传动;数字调速;直流电动机
0 引言
“电机及其运动控制系统”是工业自动化专业最重要的专业必修课,它综合了多门基础课和专业课的知识,具有很强的实践性[1,2]。教学宗旨主要是将电机拖动及其现代控制技术的科研成果及时地反映到教学中,便于学生掌握电机先进的控制理论、控制思想和实际应用。为了使学生综合掌握运用电机的调速理论,提高学生的创新实践能力,全国各高校都开设了“电气传动”课程设计这一教学内容。
从60年代至今,我国高校自动化相关专业的“电气传动”课程设计一直是以直流电动机为控制目标进行教学和实践,主要内容是设计双闭环直流调速系统,重点是设计速度和电流调节器的比例和积分系数,两组比例、积分系数均由模拟器件构成,课程设计完成的系统为模拟电路构成的双闭环调速系统。但是,目前国内外市场的直流电机调速技术已经从模拟调速技术过渡到数字调速技术,全数字调速控制系统已经渐渐取代模拟调速系统,成为国内外研究学者及相关工作人员的研究热点。在这种形势下,再以直流电动机模拟电路调节器的相关内容进行课程设计,学生很难掌握现代数字调速系统的实践研究,不足以培养本科生的实际动手能力和创新能力。
因此,急需对“电气传动”课程设计进行深入的教学改革,本文从我校教学内容改革实践出发,在“电气传动”课程设计中以“数字直流双闭环调速系统”作为教学案例,使学生充分理解和掌握数字调速技术,以培养出电气传动相关专业的优秀人才,为学生的进一步深造和工程实践运用打好基础[3]。
1 数字直流双闭环调速系统教学案例
直流电动机的调速是指控制和调节电动机的转速,而调速的关键是转矩控制。因为在额定励磁状态下的直流电动机电枢电流与直流电动机的电磁转矩成正比,所以通过控制电枢电流就能达到对转矩的控制[4]。为了有效的控制转矩就必须对电枢电流进行独立的闭环控制,因此依据转速闭环控制动态结构图,在转速环内引入电枢电流负反馈,设置电枢电流调节器,构成电流闭环控制系统,如图1所示。从闭环结构上看,电流环在里面的结构称作内环;转速环在外边的结构称作外环,构成了转速、电流双闭环调速系统的控制结构。
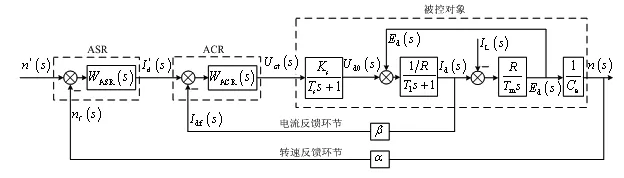
图1 转速、电流双闭环直流调速系统的动态结构图
我校“电气传动”课程设计改革主要有2个任务:①建立直流双闭环调速系统模型。这要求学生首先掌握直流双闭环控制的基本思想、原理和系统结构,教师在理论讲授时必须对转速、电流反馈控制等知识点进行充分讲解。②对电流调节器和转速调节器进行数字化设计。这是改革的课程设计的重点任务,在建立的系统模型的基础上,学生要进行数字电流调节器和数字转速调节器的设计。
改革的课程设计具体要求如下:

2 直流双闭环调速系统模型建立
2.1 固有参数计算
电动势系数为
(1)
转矩系数为
(2)
电磁时间常数为
(3)
机电时间常数为
(4)
晶闸管整流器滞后时间常数为
Ts=0.00167 s
(5)
2.2 预置参数计算
晶闸管放大倍数Ks=40;
电枢回路最大电流为
Idm=λIN=1.5IN=204 A
(6)
电流反馈系数为
(7)
转速反馈系数为
(8)
电流反馈滤波时间:Toi=0.002 s;
转速反馈滤波时间:Ton=0.01 s;
根据以上数据可以建立直流双闭环控制系统的模型如图2所示。
3 数字电流调节器设计
数字控制器的设计大体上分为两大类:经典法

图2 直流双闭环调速系统模型
设计和状态空间法设计。其中,经典法设计分为离散化法和直接法。离散化法设计则是先设计连续系统的控制器,再通过一定的离散化方法得到数字控制器。
在双闭环直流调速系统中,电流闭环系统的等效时间常数较小,电流调节器的控制算法相比其他系统较为简单,在实际控制系统中电流环采用比较小的采样周期,这样,电流调节器一般都可以采用连续域等价设计方法,即按连续系统设计方法设计电流环,确定电流调节器参数,然后再进行离散化处理。
3.1 电流环连续系统设计方法
1) 电流调节器参数计算


2) 校验近似条件



3.2 电流环调节器离散化
后向差分变换将s平面左半平面完全映射在z平面的单位圆内。因此,如果连续系统Gc(s)是稳定的,用后向差分变换后所得的离散系统必然是稳定的。由于后向差分法的上述性质,且在本系统中计算量相对较小,故采用后向差分法对电流调节器进行离散化。
采用后向差分变换法将模拟调节器中进行离散化处理得到数字调节器参数,采样周期T取6 μs。其中,电流环数字PI控制参数经计算Kp=1.002,KiT=0.000204。
在Simulink中对数字电流环进行仿真(转速环为开环),仿真框图如图3所示,单位阶跃响应如图4所示。由图4可知,上升时间约为0.0183 s,调节时间约为0.029 s,超调量约为5.349%,满足设计要求。
4 数字转速调节器设计
在双闭环直流调速系统中,转速闭环的开环截止频率ωcn大小与系统的动态性能有一定的关系,一般状况下,ωcn既不能低,也不能高。若选择的不很高,则按连续域等价法设计时将产生较大的误差,在这种情况下只能按离散设计法来设计转速调节器才能满足系统的动态性能要求。下面介绍离散设计法设计转速调节器。

图3 数字电流环Simulink仿真框图(转速环开环)

图4 数字电流环单位阶跃响应(转速环开环)
按连续控制系统设计方法设计的电流闭环控制系统,等效为一个小惯性环节,使其成为转速环的控制对象,于是就可以得到具有零阶保持器的数字直流调速系统动态结构图,如图5所示。

图5 数字控制直流调速系统结构图

图5中,转速调节器ASR的控制对象传递函数为
(9)
式中,Kn=RKα/KβCeTm。
将式(9)中的两个小惯性环节合并,并应用Z变换线性定理和平移定理,整理后得控制对象的脉冲传递函数为
(10)
其中,
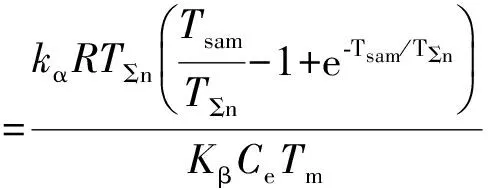
由式(10)看出,控制对象的脉冲传递函数具有两个极点,p1=1,p2=e-Tsam/TΣn;一个零点z1。
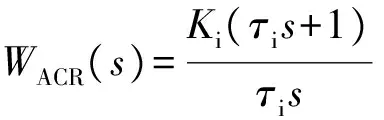
模拟系统的转速调节器一般为PI调节器,因此,选用PI型数字调节器。其差分方程为
(11)

(12)
则调节器输出方程为
u(k)=xp(k)+xi(k)
(13)
式中,Kp为比例系数;Ki为积分系数(单位为s-1);e为调节器输入;u为调节器输出;k为采样次数。对式(12)的差分方程做Z变换并应用线性定理和平移定理得
(14)
将式(14)代入式(13)中,得
(15)
转速调节器脉冲传递函数为
(16)
在考虑式(10)的控制对象脉冲传递函数,则离散系统的开环脉冲传递函数为
(17)


(18)

GASR(jλ)Gobj(jλ)
(19)
式中,开环放大系数(单位为s-2)为
转折频率(单位为s-1)为
当控制对象及采样频率确定后,Kz、τ2、τ3、τ4均为已知常数,但τ1和K0待定。
(20)
φ(λ)=-180°+arctanτ1λ+arctanτ4λ-arctanτ3λ-arctanτ2λ
(21)
根据系统期望虚拟对数频率特性中的中频段宽度和相角裕度,可以解出τ1和K0,再进一步得出调节器的比例系数Kp和积分系数Ki。由电机参数可计算出模拟直流双闭环调速系统相角裕度为46.4°,代入式(20),(21)计算,得到数字转速调节器参
数Kp=11.442,KiTsam=0.000006。
在Matlab/Simulink中对数字直流双闭环调速系统进行仿真,仿真框图如图6所示。仿真时,给定转速1400 r/min,转速响应仿真结果如图7所示,电流响应仿真结果如图8所示。

图7 数字直流双闭环调速系统转速响应仿真结果

图8 数字直流双闭环调速系统电流响应仿真结果
5 结语
将“电气传动”课程设计中以模拟电路控制直流调速系统为背景的教学内容改革为数字直流调速系统设计,使学生理解和掌握了现代数字调速技术的原理和方法。近几年我校“电气传动”课程设计的教学内容改革实践表明:将现代数字控制技术引入课程教学,可以使学生更快地学习和掌握当前电机调速的新技术和新方法,同时激发了学生的学习兴趣,提高了学生的学习积极性,培养了学生的创新思维能力和实践动手能力。
[1] 段锁林, 陈岚萍, 王雪, 史兵, 郑剑锋. “运动控制系统”课程实验平台建设与实践[J]. 南京: 电气电子教学学报, 2015,04:95-97.
[2] 李红江,贺慧英,杨锋. “电气传动控制技术”课程中的仿真实验教学[J]. 电气电子教学学报,2015,04:105-107.
[3] 刘涤尘, 向铁元, 丁坚勇, 徐箭, 吴军. “电气工程基础”课程的建设与教学研究及实践[J]. 电气电子教学学报, 2010, S1:89-94.
[4] 潘月斗, 李擎, 李华德. 电力拖动自动控制系统(第2版)[M]. 北京: 机械工业出版社, 2013年11月.
Teaching Content Reform for Curriculum Design of Electric Drive
PAN Yue-dou, CHEN Tao
(UniversityofScienceandTechnologyBeijing,Beijing100083,China)
The traditional teaching content of Curriculum Design of Electric Drive, which is based on the background of analog circuit control system, has no longer meet the teaching requirements. Therefore, it is necessary to reform the teaching content. This paper takes the digital DC double closed loop speed regulation system as an example, and elaborating the digital design method of DC double closed loop speed regulation system. Practice shows that taking the digital DC double closed loop speed regulation system design as teaching content can enable students to quickly learn and master new technology and new method of the motor speed, and cultivate the students′ innovative thinking ability and practical ability.
electric drive; digital speed regulation; DC motor

图6 数字直流双闭环调速系统Simulink仿真框图
2016-07-01;
2016-09- 24
北京科技大学教育教学改革与研究项目(JG2014M27)
潘月斗(1966-),男,博士,副教授,主要从事电气传动及自动化方向教学及科研工作,E-mail:ydpan@ustb.edu.cn
TM921.1
A
1008-0686(2017)03-0136-05
