“现代控制理论”课程案例教学探索
2017-09-08贺跃帮王天雷
贺跃帮, 王天雷
(五邑大学 信息工程学院, 广东 江门 529020)
“现代控制理论”课程案例教学探索
贺跃帮, 王天雷
(五邑大学 信息工程学院, 广东 江门 529020)
针对“现代控制理论”课程中极点配置的教学内容理论性强、概念抽象、学生理解较为困难以及缺乏兴趣等问题,本文提出基于案例的教学方法,以四旋翼无人机飞控算法设计为例,向学生讲述了采用极点配置设计观测器和控制器的原理和实际应用,加深了学生对课堂理论知识的理解,培养了学生的工程实践能力。
现代控制理论;案例教学;四旋翼无人机
0 引言
“现代控制理论”是一门理论性强,内容丰富,概念抽象,数学推理与矩阵运算多的课程,是高等工科院校电气工程、自动化等专业的一门重要的专业核心课程[1,2]。
该课程以高等数学、线性代数、复变函数、自动控制原理为基础,以线性、非线性、定常、时变和离散等多输入多输出系统为研究对象,以时域空间上的状态空间描述为研究方法,研究使系统在一定意义下的稳定或达到某种最优指标的控制器设计。由于该课程涉及的理论多,概念抽象,公式运算繁琐,因此导致学生要学好难度较大[3]。 即使部分数学基础较好的学生能够学懂,也不知道怎么使用,特别是对内容的理解和应用缺乏感官认识。
针对以上存在的问题,目前已有文献[1-5]对该课程进行了有意义的教学改革探讨。其中文献[3,4]就能控性、能观性、极点配置和观测器设计等核心问题采用案例教学法获得较好的教学效果,但这些报道中,仅仅采用仿真的手段还无法让学生更直观地认识现代控制理论在实际中的应用。鉴于此,笔者结合自身科研研究方向,以四旋翼无人机自主飞行控制为案例,通过实际应用来讲解课程的理论知识,从而提高学生学习兴趣和工程应用能力[6]。
1 极点配置课堂教学举例

2 四旋翼无人机系统介绍
四旋翼无人机相对于单旋翼无人机,具有结构简单,制造成本低的优势,在近10年来得到了全世界各大研究院所、企业的极大关注与研究。
图1为自主研制的一套四旋翼无人机,主要包括GPS、控制板(STM32F4单片机、MPU6050惯性测量单元、HMC5883电子罗盘、SD卡插槽)、猛禽360机架、12V锂电池以及遥控接收机等。该系统通过控制四个螺旋桨的升力和扭力实现本身的姿态与位置控制,能够完成半自驾、定点悬停和自主前飞,且通过上位机可以实时观测所有参数和系统状态,方便课堂中实时向学生展示控制效果。
3 数据的采集与滤波

图1 四旋翼无人机
(1)

图2所示为垂向加速度的测量信息与p=15的一阶线性滤波结果。从图中很容易看出引入一阶线性滤波后的干扰明显减小。但需要向学生阐明的是,使用该滤波信号,配置的闭环极点的模值必须小于3,才能保证该滤波器对闭环系统的稳定性不产生影响。

图2 垂向加速度信息
4 能观性分析与观测器设计
四旋翼无人机通过气压计或超声波采集高度信息,通过惯性测量单元采集加速度信息,其关系可由下述状态方程描述。
(2)
其中:x=[hvz]T为系统状态,h为无人机真实高度,vz为无人机垂向速度,g=9.78为重力加速度,az为加速度测量信息,wz为加速度测量干扰,y为气压计或超声波测量信息,wh为测量干扰。
首先,检查系统的能观性。
(3)
根据式(3)可知系统完全能观,即能进行观测器设计。
接着,根据现代控制相关知识可设计如下全阶观测器:
(4)
将式(4)减去式(2)可得
(5)

由于系统可观,可通过设计L,任意配置(A-Lc)极点。因此,式(5)可通过极点配置,保证观测误差e稳定。实际中,一般配置极点模值越大,高度测量干扰wz影响就越大,极点模值越小,加速度测量干扰wz对观测误差影响就越大。因此,实际应用中需要根据wh和wz的大小合理配置极点。
图3和图4所示为高度气压计测量信息与采用极点配置观测器的观测结果。从图中可以看出,不仅垂向速度被观测出,而且高度观测结果相对测量值极大地减少了干扰影响,即具有滤波效应,这也是引入观测器的两种意义所在。在课堂教学中,可通过设计多组闭环极点,向学生展现不同的输出效果,从而使学生加深对极点配置与观测器性能之间关系的理解。
5 能控性分析与控制器设计
四旋翼无人机一般采用内外环结构,内环为角速度控制环,由于该环涉及到模型参数,因此采用PID控制可快速实现。外环控制对象可线性化描述为

图3 高度信息

图4 垂向速度信息

(6)
首先,检查能控性。
(7)
根据式(7)可知该系统能控,即能够进行极点配置设计控制器。
接着,为系统配置闭环极点,由于状态有3个,可设计一个非主导极点,一对主导极点,如si=-6.5,s2,3=-1±i。在课堂中,需要向学生阐明的是,由于建模,式(6)忽略了内环角速度控制环的影响,因此,配置的极点不能任意大,实际中可通过事先设计好的实验视频向学生展现这点。
最后,根据状态负反馈计算方法,采用Matlab极点配置函数place或acker获取状态负反馈增益,即

(8)
图5为采用该极点配置后闭环系统x方向输出信息。从图中可以看出,无人机x方向能够实现悬停和前飞。
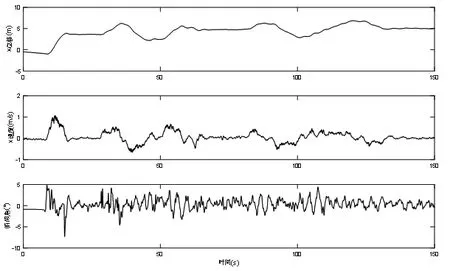
图5 x方向闭环控制信息
6 结语
自制的四旋翼无人机系统代码公开,可方便学生自行修改,且数据获取容易,学生可以在课堂上随时对实验数据和实验结果以及设计过程进行相应讨
论,这种做法极大地加深了学生对“现代控制理论”课程相关内容的理解,显著提高学生的工程实践能力。
[1] 陈峰. CDIO模式下“现代控制理论”课程教学改革的探讨[J]. 成都: 实验科学与技术, 2012, 10 (3): 69-70,132.
[2] 姜顺, 张相胜, 潘丰.“现代控制”课程教学改革的思考与探索[J]. 石家庄: 教育教学论坛, 2015 (41): 132-133.
[3] 李武, 荣军. 案例教学法在现代控制理论课堂教学中的应用[J]. 上海:电子技术教育, 2014(11): 77-79.
[4] 杨帆, 盛波, 于艾清, 米阳, 李俊. “现代控制理论”教学改革探索[J]. 南京: 电气电子教学学报, 2015, 37(4): 58-61.
[5] 朱永红, 力蔓华, 王建宏, 曹利刚. 基于MATLAB研究生“现代控制理论”课程教学模式改革与实践[J]. 景德镇: 景德镇学报, 2014, 29(6):13-15.
[6] (法) Lozano Rogelio著. 无人机-嵌入式控制[M]. 陈自力, 蔚建斌, 江涛译. 北京: 国防工业出版社, 2014年10月
[7] 刘豹, 唐万生主编. 现代控制理论[M]. 北京: 机械工业出版社, 2006年7月。
Case Teaching Discussion on Modern Control Theory Course
HE Yue-bang, WANG Tian-lei
(SchoolofInformationEngineering,WuyiUniversity,Jiangmen529020,China)
Modern Control Theory is a course of strong theory and conceptual abstraction. It is difficult for students to understand, and the students′ learning interest is not high. For these problems, the paper presents a case teaching method, which uses the quadrotor unmanned flight control system to illustrate the theory and application of the knowledge about observer design and controller design used by the pole assignment. It is proved that the method can deepen the student′ understanding of the modern control theory, and also train students′ engineering practice ability.
modern control theory; case teaching; quadrotor
2016-07-24;
2017-11- 13
广东高校优秀青年创新人才培养计划项目(2014KQNCX157)
贺跃帮(1983-),男,博士,讲师,主要从事无人机自主控制研究极其相关的教学工作,E-mail:heyuebang@foxmail.com
G423
A
1008-0686(2017)04-0066-04
