面向工程教育专业认证的PMSM控制教学研究
2017-09-08周华伟刘国海毛彦欣
周华伟, 刘国海, 张 多, 毛彦欣
(江苏大学 电气信息工程学院, 江苏 镇江 212013)
面向工程教育专业认证的PMSM控制教学研究
周华伟, 刘国海, 张 多, 毛彦欣
(江苏大学 电气信息工程学院, 江苏 镇江 212013)
工程教育专业认证要求培养学生具备运用综合知识解决本领域复杂工程问题的能力。本文以永磁同步电机(PMSM)控制为例,以电动汽车驱动为工程背景,从解决实际复杂工程问题的一般性方法和规律出发,建立电机模型,设计控制策略,并且进行仿真分析和实验验证。该教学方法能丰富教学内容,达到工程教育专业认证目标。
PMSM驱动控制; 仿真分析; 实验验证
“运动控制系统”课程是高等学校电气自动化专业的一门重要专业课程,具有很强的知识综合性和实践性[1]。仅通过课堂的理论教学和少量的实验教学环节,学生难以具备灵活贯通运用所学的该专业课程知识的能力,更无法达到工程教育认证对工程类专业特别强调的“运用综合知识解决本领域复杂工程问题”的要求[2]。如何在该课程教学中提高学生的动手能力和创新思维能力,培养学生运用综合专业知识解决本领域复杂工程问题的能力,是新形势下提高该课程教学质量的关键。
本文以“运动控制系统”课程中永磁同步电机(PMSM)控制的教学内容为例,以学生为中心,引入电动汽车为工程应用背景,从电动汽车对PMSM驱动系统性能需求出发,通过建立PMSM模型、设计矢量控制策略、采用Matlab/Simulink构建PMSM控制系统模型进行仿真分析,然后让学生设计制作电机控制器,并利用实验室现有资源搭建模拟实际电动汽车驱动运行的电机对拖实验平台进行验证。通过解决这一特定对象的实际工程问题,让学生建立起解决实际工程问题的一般性方法和思路。本方法凸显实际工程背景,可有效调动学生学习的积极性和主动性,激发学生的创新性思维,切实提高学生分析问题和解决复杂工程问题的能力。
1 永磁同步电机驱动控制
在课堂教学中根据电动汽车对PMSM特性需

图1 PMSM驱动控制器拓扑
求讲解PMSM驱动系统的数学模型以及控制策略。
1.1 PMSM数学模型
电动汽车要求驱动电机具有高转矩密度和宽恒功率调速范围,因此一般采用V型永磁体内嵌式PMSM,其三相驱动逆变器的拓扑机构如图1所示。
假设电机磁路为线性;不计铁心中的涡流和磁滞损耗;气隙磁场在空间为正弦分布;三相定子绕组对称。PMSM在三相静止坐标系上的模型为
(1)
(2)
式中:uA、uB、uC、iA、iB、iC、ΨA、ΨB、ΨC分别是电机相电压、相电流和定子相磁链,LAA、LBB、LCC、LAB、LCA、LBC分别是三相绕组自感、互感,R为绕组电阻,Ψf为永磁磁链,θ是转子位置角。
可见定子相磁链相互之间存在耦合,在自然坐标系上很难使该电机的性能和独立励磁的直流电机一样。为提高该电机运行性能需要解耦,采用CLARK和PARK变换将式(1)变换到同步旋转坐标系上得[3]
(3)
式中:Ld、Lq、id、iq、ud、uq分别为d、q轴电感、电流、电压;ω为电角速度。
电机输出转矩为
(4)
式中:np为电机极对数。
1.2 PMSM控制和弱磁性能分析
由式(3)可知在d-q轴上PMSM定子电压由三部分构成:阻抗压降、耦合电压、反电势。随着转速升高,耦合电压占的比重增加。因此低速时d-q轴电流耦合作用影响不大,但随着速度升高,耦合作用的影响会越来越严重。PI电流控制只对d-q轴的两个电流环单独作用,忽略了交叉耦合,导致当其中一轴上电流指令发生变化时,另一轴上电流会产生一个瞬时误差,引起转矩瞬时畸变,影响其动态性能[4]。因此需要消除该耦合电压,才能使PMSM获得和独立励磁的直流电机一样的性能。观察式(3)可知最简单有效的方法是从式(3)中减去耦合电压。于是采用如图2所示的电压前馈解耦控制就能消除d-q轴电流间的耦合[4]。

图2 电压前馈解耦控制
由式(4)可知电机转矩取决于电流id和iq。id和iq在d-q轴电流平面上表示成一个点,定义为“电机工作点”,其在d-q轴电流平面上移动形成电流轨迹。当电机转速超过额定转速进入弱磁运行时,要求电机工作点沿特定电流轨迹运行,以满足电机运行限制条件下的性能最优[5]。

(5)

(6)
为分析电机弱磁性能,使用电机稳态方程且忽略相对较小的定子电阻压降,PMSM在d-q坐标系上的稳态电压方程为
(7)
将式(7)代入式(6)使电压限制转化为电流限制:
(8)
如图3所示,在d-q轴电流平面上,式(5)表示为一个以坐标O (0, 0)为圆心的圆,称为电流限制圆;式(8)表示为一个以坐标C (-ψf/Ld, 0)为圆心的椭圆,称为电压限制椭圆[5]。

图3 PMSM的电气约束
在电机工作点达到B点之后,如转速进一步升高,则应沿最大转矩电压比(MTPV)线向C点移动才能获得最大输出转矩[6],但是图4所示电压反馈法只能使电机工作点继续向左移动,直到电流圆和电压圆没有交点,这必然导致电机输出转矩能力大幅降低,更主要的是此时电流无法继续跟随给定电流,从而导致电流调节器饱和,引起电流失控,因此需对id限幅,一般选id限幅值为Ieigen=-Ψf/Ld。
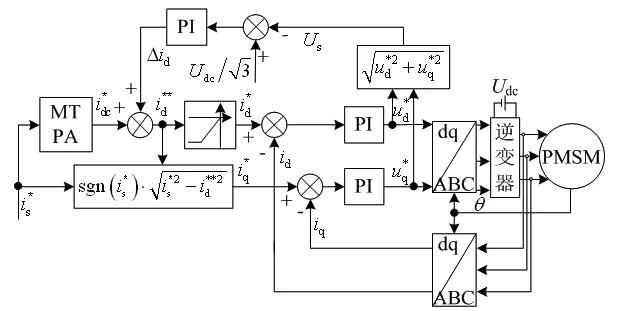
图4 基于电压反馈的弱磁控制策略
2 仿真分析和实验验证
2.1 PMSM驱动系统Simulink仿真分析
加了让学生深入理解PMSM控制策略,布置课后作业,让学生在Matlab/Simulink中搭建PMSM驱动控制系统模型进行仿真分析。PMSM参数:额定功率是20 kW,额定转速是2030 r/min,极对数是3,定子相电阻为26 mΩ,d轴电感是0.52 mH,q轴电感是1.02 mH,永磁磁链是0.129 Wb。母线电压是260 V,d轴限幅电流是-140 A,MTPA角是20度。
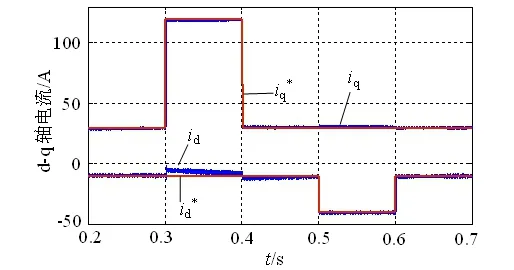
图5是PMSM转速为1500 r/min,d-q轴电流指令阶跃时的电流响应。可见仅采用PI控制时,由于d-q轴之间存在电压耦合,电流指令突变时,d-q轴电流之间相互影响,无法跟随电流指令。而采用电压前馈控制之后d-q轴电流间的耦合就消除了,电流能很好地跟随电流指令,因此PMSM动态性能提高了。图6是PMSM转速为5000 r/min,转矩在56 Nm和0 Nm之间阶跃时的电流响应波形。整个过程电流跟随较好,验证了弱磁策略的可行性。
学生在Matlab/Simulink仿真平台上可以通过修改PI参数、PWM发波方式、电机参数、负载等,观测转速、电流、转矩的变化,从而加深对PMSM驱动控制系统的理解。在此基础上,可以继续拓展,设计其它的控制策略,以进一步改善系统性能。
2.2 PMSM驱动系统实验
在前述仿真研究的基础上,为让学生充分认识到所学知识的重要性,极大调动学生学习兴趣,课程设计中安排了实践环节。学生通过团队合作,采用Altium Designer设计制作图7所示PMSM控制器,搭建了电机对拖实验台架。
(a) PI

(b) 电压前馈控制图5 额定转速下的电流响应性能

图6 弱磁情况下的电流响应性能

图7 永磁电机控制器及实验平台
图8是转矩阶跃时电流响应,可看出PI控制时d-q轴电流相互影响导致畸变,不能很好地跟随电流指令变化;而采用电压前馈解耦时的电流响应,d-q轴电流没有发生畸变,能较好地跟随指令突变。图9是d-q电流平面上的电流轨迹。在整个升降速过程中d-q轴电流均能很好地跟随电流指令变化。
此环节难度较大且时间紧张,学生需要将所学知识综合运用并灵活贯通,需要带着问题去学习新知识,同时需要相互交流与合作。通过此环节培养,学生掌握了PMSM驱动控制策略,增强了团队合作、自主学习的意识,明白了不断学习和适应发展的重要性;另外此环节也培养了学生运用综合知识分析和解决复杂问题的一般性方法和能力。
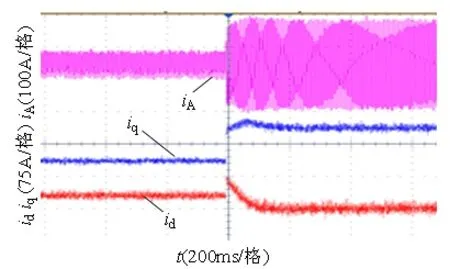
(a) PI

(b) VFDC图8 额定转速下的电流响应
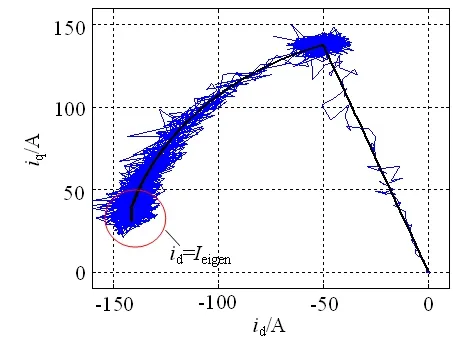
图9 d-q电流平面上的电流轨迹
3 结语
本文从电动汽车驱动这一实际工程运用背景出发,循问题分析、数学建模、仿真分析、控制器设计、实验平台搭建、程序编写调试以及最终的实验研究之轨,培养学生分析问题、解决问题的能力。该过程需要学生综合、灵活运用“电路”、“模拟电子技术”、“数字电子技术”、“电力电子技术”、“自动控制原理”、“电机学”、“运动控制系统”等多门课程的知识以及现代工具软件。整个过程中,尤其需要学生带着问题去查阅资料和学习知识、需要相互沟通、帮助,激发了学生学习兴趣,培养了其自我学习和不断学习新知识以及团队协作的意识,加深了其对所学专业理论知识的理解,培养了其创新思维能力,加强了其工程实践能力。
由实际工程问题入手,从建模、仿真、实验三个环节系统地培养学生综合运用知识、分析和解决复杂问题的能力,从而满足工程教育认证对工程类本科专业特别强调的“”解决复杂工程问题“”要求。
[1] 阮毅, 陈伯时. 电力拖动自动控制系统--运动控制系统(第4版)[M]. 北京: 机械工业出版社, 2015.
[2] 秦海鸿, 黄文新, 曹鑫, 王晓琳. 电气工程专业领域复杂工程问题教学改革探究[J]. 南京: 电气电子教学学报, 2016, 38(5): 7-9.
[3] 唐任远. 现代永磁电机-理论与设计[M]. 北京; 机械工业出版社, 2014.
[4] 周华伟, 温旭辉, 赵峰, 张剑. 基于内模的永磁同步电机滑模电流解耦控制[J]. 北京: 中国电机工程学报, 2012, 32(15): 91-99.
[5] 王成元, 夏加宽, 孙宜标. 现代电机控制技术(第2版) [M]. 北京: 机械工业出版社, 2014.
[6] 朱磊, 温旭辉, 赵峰, 孔亮. 永磁同步电机弱磁失控机制及其应对策略研究[J]. 北京: 中国电机工程学报, 2011, 31(18): 67-72.
Teaching Study of PMSM Control for Engineering Education Accreditation
ZHOU Hua-wei, LIU Guo-hai, ZHANG Duo, MAO Yan-xin
(SchoolofElectricalandInformationEngineering,JiangsuUniversity,Zhenjiang212013,China)
Engineering education accreditation requires that students have the ability of using comprehensive knowledge to solve complex engineering problems in their major field. To achieve the object, permanent magnet synchronous motor (PMSM) control for electric vehicle is used as an example to build motor model, design control strategy, conduct simulation and experiment. The method can enrich teaching content and achieve the objective of engineering education accreditation.
PMSM drive control; simulation analysis; experimental verification
2016-12-23;
2017-04- 26 基金项目:江苏大学高等教育教学改革与研究课题(2015JGYB034)
周华伟(1980-),男,博士,副教授,主要从事运动控制方面的教学与研究工作,E-mail: zhouhuawei@ujs.edu.cn
G642.0
A
1008-0686(2017)03-0024-05
