基于最小二乘适值比较计算的静态气体源定位
2017-09-08陈立伟潘莎
陈立伟 潘莎
(1.郑州大学电气工程学院,河南 郑州 450001;2.河南省财经学校,河南 郑州 450012)
基于最小二乘适值比较计算的静态气体源定位
陈立伟1潘莎2
(1.郑州大学电气工程学院,河南 郑州 450001;2.河南省财经学校,河南 郑州 450012)
通过构建多节点分布式气敏传感器网络,对风场中多个位置上的目标气体浓度进行检测。将浓度检测结果与节点位置坐标引入湍流扩散模型,在此基础上依据最小二乘法则设计潜在气体源的适值计算函数。将潜在气源的坐标参数引入适值函数进行计算,通过结果比较得到气体源位置最优解。建立仿真风场中的气体扩散模型并引入传感器观测误差,对该算法的定位效果进行测试,仿真定位实验证明即使观测存在该算法依然可以达到较高的定位成功率。
气体源定位;气敏传感器;适值计算;气体扩散模型
仓储、管道泄露、火灾等事故的发生通常会伴随产生大量的有毒、有害气体,快速、精准地对气体扩散源头进行定位能够有效确定灾源位置,从而实现迅速补救并减少灾害损失。这种寻找气体扩散源头的技术被称为气体源定位技术[1]。
现有的气体源定位技术从工作原理上可以分为两种:主动嗅觉和静态气体源定位。主动嗅觉是由装载了气敏传感设备、风速风向传感设备及自定位系统的主动嗅觉机器人在风场中依照既定搜索策略进行主动搜索,最终移动到气体源位置从而实现定位的技术;而静态气体源定位则是依靠风场中位置固定的气体检测设备通过交叉定位或模型计算的方法实现对气体源位置的估算。主动嗅觉法的定位精度较高,受到风向、气温等风场环境参数变化的影响较小,对扩散模型的依赖度低,但所需搜索时间较长,单一机器人不适用于大范围搜索,且搜索效率及定位成功率受障碍物、裂隙等地表情况的影响较大。而基于扩散模型的静态气源定位方法可以快速进行定位计算,定位效果基本不受地表环境干扰,随着计算机技术快速发展,流体建模算法以及气敏传感器技术飞速进步,静态气体源定位技术在近年来得到了快速应用[2]。
现有的静态气体源定位算法多采用模型逆推计算、风场全局搜索等方法确定气体源位置的最优解,而在面对实际问题时气体扩散源的位置信息并不是完全未知的,在泄露气体种类已知的情况下不需要依靠扩散模型,凭借已知的仓储、管道、易燃物的坐标就可以初步确定潜在的泄露源或着火点(如图1所示)的位置信息。在此基础上,只需要通过相互比较得到气体源位置最优解即可,不需要对检测区域的上风处进行大范围搜索。

图1 潜在气体源定位示意图
本文基于最小二乘法则所设计的适值比较算法是将各个观测点的位置坐标及检测结果作为固定参数引入湍流扩散模型建立适值函数式,然后将潜在气体扩散源的位置坐标代入适值函数计算得到其对应的适值参数,然后将各个潜在气源的适值参数进行直接比较得到实际气体源坐标最优解。
1 湍流扩散模型
常用于预测扩散气体浓度的模型有BM(Britter Mc⁃Quaid)模型、三维有限元模型、高斯扩散模型以及湍流扩散模型。湍流扩散模型最早应用于静态气体源定位实验,它通过气体在二维平面内的浓度分布描述了平流风场中的气体湍流扩散情况,是目前静态气体源定位领域应用最为广泛的数学模型(1)[1-5]:
C(x,y,x′,y′,t)=
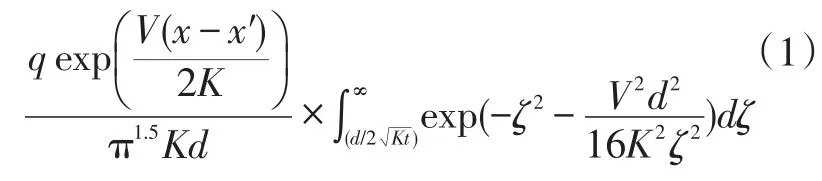
式(1)中,设气体源处于z'平面,q为气体泄露速度;t为气体扩散时间;V为风速且风向与x轴正方向一致;K为气体扩散系数(由环境参数及气体种类决定额常数);d为z=z'平面上任意点(x,y,z')与气体源S(x',y',z')的欧几里得距离;C为t时刻点(x,y)处的气体浓度。初始条件设t≤0时任意位置上气体浓度为C=0,则当t→∞时由式(2)可得:

设气体源与传感器同置于z=z'平面上,气体源点与坐标系原点重合,K=0.04m2/s,V=0.02m/s,q=5mg/s,风向与x轴正方向一致。当t→∞时在气体源附近出现气体浓度最高值,气体扩散方向与风场风向一致,气体浓度分布如图2所示。Matthes J,Groll L等人[3]的实验证明即使在微风情况下(V=0.02m/s)湍流作用依然能够帮助气体迅速扩散,气体源附近风场的气体浓度将在短时间内快速收敛于一个稳定值,这一稳定值与式(2)的计算结果一致[3,4]。

图2 湍流扩散模型的水平面气体浓度分布计算结果
2 适值函数
最小二乘估计是以误差平方和最小为准则,根据观测数据估计模型中未知参数的基本参数估计方法。最小二乘估计的基本思路是已知Y=f(X,θ),Y为输出向量,X为输入向量,θ为参数向量,经过M次实验得到观测值(X1,Y1),(X2,Y2)……(Xm,Ym)求解参数向量θ使得式(3)为最小:

根据系统的类别可以分为线性最小二乘估计与非线性最小二乘估计,对于复杂的非线性系统通常采用迭代、搜索的方法求取最优解,也可以结合粒子群优化以及遗传算法等复杂方法对特殊问题进行处理,但所求最优解使误差平方和最小的这一基本思路与线性最小二乘法的基本原则相同。设包含N个传感器节点的传感器阵列与气体源在同一水平面内,设S1为传感器阵列的基准节点,将节点观测值与坐标代入式(2)可得:
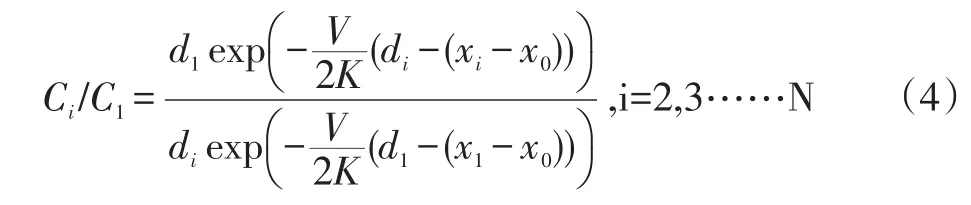

未知参数包括环境参数γ、气体源坐标x'、y',对静态气体源的定位可以转为式(5)的最优参数估计问题。处理非线性模型参数估计采用传统的迭代、搜索算法容易出现陷入局部极值、收敛性差、对迭代初值敏感等问题,如在引言中所提到的,在实际的应用中传感器阵列铺设在气体扩散源的下风处后只需要对几个潜在的气体源进行比较求出最优解即可,因此不需要逐渐逼近进行计算。采用适值计算,通过比较方法进行定位的算法由以下3个步骤组成:
第一,如图1(a)所示,根据实际情况选定L个潜在气体源,设潜在气体源al的位置坐标为(xl',yl')。当潜在气体源没有具体坐标而是处于一大片范围的时候则无法通过对确定位置的简单计算、比较得到最优解。因此,采用划分后再计算的方法进行比较:如当确定为林火灾害后,将已知林地按照定位精度的实际需要划分为多个区域,将区域坐标(区域中心坐标)进行计算比较,如图3所示。

图3 潜在气体源连续分布区域中心坐标分割示意图
第二,将al的坐标(xl',yl')带入式(5),根据最小二乘法则得到适值函数(6),式中除了γ外都为确定参数,因此极易求出Ql的最小值Qlmin。
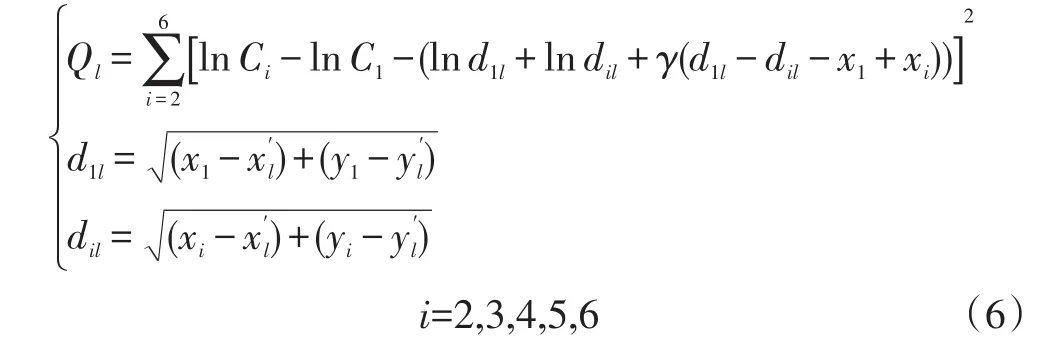
第三,依照步骤(2)对所有潜在气源αl进行计算得到各个区域内的Q最小值:Q1min,Q2min……Qlmin。通过对比极值QAmin,从而求得对应的潜在气体源amin为实际气体源坐标的最优解。与经典的交叉定位法相比[5-6],该定位算法不需要预先测定风速和气体扩散系数,有效避免了局部最优的干扰。
3 仿真实验设计
基于第一节中的湍流扩散模型的进行气体扩散模型,设实际气体源坐标、传感器节点坐标如图4所示。图中,Si为传感器,R为实际气体源,深色区域A为气体源可能存在的范围。A的预设范围为:0m≤x'≤7m,0m≤y'≤10m。设范围A中包括实际气源在内有L个潜在气体源(坐标随机且相互间最小欧几里得距离设为0.1m),并对传感器位置上的气体浓度检测结果引入传感器(参考TGS2610金属氧化物气敏传感器)量程β%以内的随机观测误差。将传感器的位置坐标、浓度观测结果代入式(6)建立适值函数式,然后将各个潜在气体源的位置坐标分别代入适值函数式计算适值参数并比较计算结果,如果实际气体源所对应的适值参数最小则定位实验成功。
4 仿真实验及结果分析
如图4所示,设实际气体源坐标为(5,4.5)传感器阵列各个节点坐标分别为(7,7)、(9,7)、(7,5)、(9,5)、(7,3)、(9,3),传感器观测误差为量程5%以内的随机观测误差(β=5),引入30个(L=30)位置坐标在A内随机分布的潜在气源。在100次定位实验中,准确定位气体源93次。调整实际气体源坐标、观测误差及潜在气体源个数参数,该算法定位实验结果见表1。

图4 气体源坐标、传感器节点坐标示意图
由表1可知,新算法在β%≤10%的情况下依然能够达到90%以上的定位成功率,而当β=15时,定位成功率开始低于90%,传感器观测误差对定位效果影响较大。同时,潜在气体源个数对定位成功率的影响较小,随着个数从10到30的增长定位成功率小幅下降。通过横向对比可以发现当气体源处于传感器阵列中线且中线与风向重合时,该算法的定位成功率最高。
5 结论
本文结合最小二乘法则及湍流扩散模型设计了应用于稳定风场中点气源定位的计算方法。采用分布式气敏传感器阵列采集风场中多个位置的气体扩散浓度,将传感器节点的观测值与坐标信息与湍流扩散模型相结合建立适值函数式,然后通过该式计算不同坐标的潜在气体源适值参数,最后通过相互比较得到气体源坐标最优解。仿真实验证明,新的定位算法具有极高的定位成功率,且对传感器误差具有一定抗干扰能力。

表1 定位仿真实验结果
[1]陈立伟,杨建华,崔博.基于金属氧化物气体传感器的气味罗盘的实验分析研究[J].传感技术学报,2010(11):1532-1535.
[2]陈立伟,杨建华,孙亮,等.基于分布式传感器阵列的静态气体源定位方法[J].电子科技大学学报,2014(2):212-216.
[3]Matthes J,Groll L,Hubert B K.Source localization by spa⁃tially distributed electronic noses for advection and diffusion[J]. IEEE Transactions on Signal Processing,2005(5):1711-1719.
[4]Matthes J,Groll L,Hubert B K.Optimal weighting of net⁃worked electronic noses for the source localization[C]//Systems Communications,2005.
[5]Cai J,Levy D C.Tracking dynamic source direction with a novel stationary electronic nose system[J].Sensors,2006(6):1537-1554.
[6]Hayes A T,Martinoli A,Goodman R M.Distributed odor source localization Sensors[J].IEEE Sensors Journal,2002(3):260-271.
An Approach of Odor Source Localization Algorithm Based on Least Squares Fitness Comparing
Chen Liwei1Pan Sha2
(1.School of Electrical Engineering,Zhengzhou university,Zhengzhou Henan 450001;2.Henan Finance and Economics School,Zhengzhou Henan 450012)
This paper built a distributed sensor networks system,and test the odor concentration on several different locations in the wind fields.Based on the turbulence model,this paper proposed an approach of odor source localiza⁃tion which is designed to find the static odor source in stable wind field.And the odor source can be localized depend⁃ed on the measuring results of sensors system.The odor source localization problem is converted into solving the opti⁃mal solution based on Least-Square and the fitness comparing equation is used.Comparing with other odor source lo⁃cation algorithms,new algorithm can operate without known wind speed and diffusion coefficient.Several simulation⁃experiments are performed to test the localization algorithm.The experiment results shows the proposed method is ef⁃fective.
odor source localization;gas sensor;fitness calculation;gas diffusion model
O437.1
A
1003-5168(2017)08-0050-04
2017-07-03
陈立伟(1983-),男,博士,副教授,研究方向:气体源定位、模式识别算法、新型传感器设计。
