300mm硅片高精度真空传输系统设计*
2017-09-08李学威何书龙赵治国
李学威,何书龙,赵治国
(沈阳新松机器人自动化股份有限公司,沈阳 110168)
300mm硅片高精度真空传输系统设计*
李学威,何书龙,赵治国
(沈阳新松机器人自动化股份有限公司,沈阳 110168)
文章设计一种300mm硅片真空传输系统,满足市场对硅片传输过程高精度,高洁净度,高效率的需求。其中硅片传输腔室采用真空设计,并优化了真空腔室的结构以适应300mm硅片传输,真空度可达2×10-7Torr。真空机械手采用对称连杆直驱机械手,大气机械手采用R-θ型机械手,其重复精度均为±0.1mm。设计了AWC纠偏检测系统,利用光电对射传感器,实现对硅片的实时检测及位置纠正。通过验证性试验数据分析,得到整个系统的整体精度、洁净度、真空度和真空变化值满足工作要求,验证了设计的合理性。
硅片传输;真空腔室;机械手;纠偏检测系统
0 引言
硅片传输是硅片制造的核心环节,开发硅片传输系统意义重大[1-4]。随着信息产业对硅片储存信息能力要求的提高,世界的硅片的主流成产线由直径150mm、200mm向300mm转变,对硅片传输系统的要求也越来越大。为保证硅片的成片率并提高生产效率,高速、高精度和高洁净度成为研究硅片传输系统的难点[5]。为此,目前研制的硅片传输系统集合了机械,电子,软件,传感等多种学科,利用计算机技术的优势实现了硅片传输系统的高度自动化。在保证精度和洁净度的前提下,正逐渐提高生产效率,增大产量,来满足市场对硅片的需求。
目前,ABC等国外企业的300mm的硅片生产线已经投入市场,并积极研发450mm的硅片,并且硅片传输系统的自动化,可靠性,洁净度及精度等方面的水平都很高,已经逐渐进入国内市场[4]。而中国的300硅片传输平台的技术水平还处于研发试验阶段,国产的全自动的硅片传输系统各个方面并不成熟,效率低,可靠性差,自动化程度低制约着我国硅片市场的发展[6-7]。为此,我国必须实现硅片传输平台自主研发,本文设计了一款300mm全自动高精度真空硅片传输系统,突破了机械手和真空腔设计难题,不仅能够提高搬运平台系统和工艺设备的研发和技术水平,而且提升我国的装备制造能力和水平。
1 硅片真空传输系统整体结构设计
本文设计的硅片真空传输系统主要用于300mm硅片生产,主要分为半导体前端模块(EFEM)、大气机械手,预对准装置,真空传输腔室和真空机械手五个部分。为了保证提高300mm硅片的成片率,要求高洁净的传输环境和高精度的传输过程。因此对整个硅片传输系统整体结构布局如图1所示。整个系统处于封闭空间,并应用真空传输腔室保证洁净度,利用R-θ型大气机械手、对称连杆真空机械手传输硅片和预对准装置保证传输的精度。

1.半导体前端模块(EFEM) 2.大气机械手 3.预对准装置 4.硅片装载装置 5.硅片加工工位 6.真空机械手 7.真空传输腔室
图1 硅片传输系统整体结构布局图
系统的工作流程如下:大气机械手尾部传感器扫描硅片装载装置(待加工硅片)中硅片数量,然后从中取出硅片,放置在预对准装置上,预对准装置对硅片进行预对准后,大气机械手将硅片传输到真空传输腔室,再利用真空机械手将硅片输送到加工工位,硅片加工后取回,经真空机械手,真空传输腔室,大气机械手,再次装载回另一个硅片装载装置(加工完成硅片)中。
如图2所示的三维建模,是根据硅片传输的工作需要,设计的300mm硅片真空传输平台,以此满足高精度、高洁净度的硅片传输工作需要。
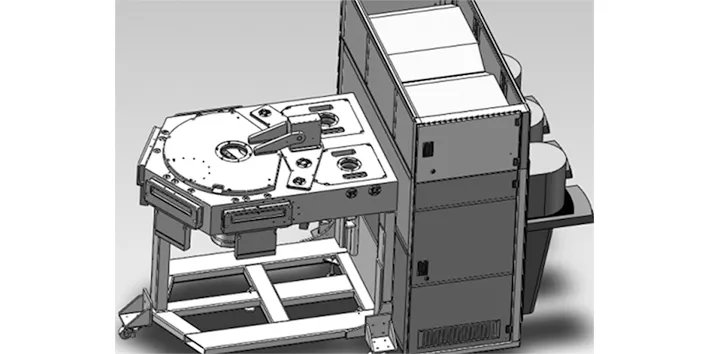
图2 300mm硅片传输平台三维建模
技术参数:
(1)真空传输腔室洁净等级:Class1;
(2)真空传输腔室真空度:常温2.0×10-7Torr;
(3)平台整体重复定位精度:±0.2mm;
(4)真空机械手的运动范围:垂直方向,35mm;旋转方向:无限制,伸展方向:730mm;
(5)大气机械手运动范围:旋转方向:无限制,伸缩方向:1010mm。
2 真空传输腔室设计
真空传输腔室是整个系统设计的最重要部分,是实现高洁净度的传输环境的基础。如图3所示,本文所设计的真空传输腔室系统主要包括以下几部分:传输腔室;传输腔室盖板及其举升装置;设备支撑框架;真空系统;充气系统;AWC传感器;加热和冷却系统。该真空传输腔室采用模块化设计,主要用于300mm硅片的传输,同时兼容200mm硅片的传输,可实现缓存腔室和工作腔室快速且独立的加热及冷却。

1.真空系统2.充气系统3.冷却盘4.传输腔室 5.传输腔室盖板举升装置6.传输腔室盖板 7.AWC 传感器 8.设备支撑框架
图3 真空传输腔室组成示意图
2.1 真空传输腔室本体结构设计
为了满足工作要求,真空传输腔室分为三个腔室,左缓存腔室、右缓存腔室和工作腔室。由于真空对机构的强度要求很大,因此真空传输腔室为一整块铝合金材料加工而成,结构强度大,并且易于实现较高的真空能力。
真空传输腔室具有高度集成一体化的特点。传输腔室上有真空机械手安装孔、EFEM接口、真空系统接口、充气系统接口、腔室冷却系统接口、工艺腔室接口和AWC传感器,传输腔室示意图如图4所示。真空传输腔室外形设计有两个缓存密封接口,与EFEM相连接;设计有四个侧面,并提供安装工艺腔室的密封接口,可与工艺腔室连接。四个侧面的几何中心安装真空机械手,以此保证半导体晶圆在传输加工过程中均在高真空密封腔室中,保证精度与洁净度。这种外形设计利用较小的占用面积提供了较多的工艺腔室。在缓存腔和工作腔设计有透明观察窗口,在不影响密封性条件下,可观察腔室工作状况,也利于发现问题。

图4 传输腔室示意图
真空传输腔室盖举升装置由减速比为80的蜗轮蜗杆减速机带动两个悬臂旋转带动真空传输腔室盖运动,实现真空传输腔室盖的打开和关闭。如图5所示,真空传输腔室盖打开极限位置为90°左右,满足真空机械手通过腔室盖装入到真空传输腔室中。

图5 腔室密封盖的举升机构
为了验证真空腔室的强度能否满足设计需求,本文利用Solidworks中的仿真模块,对腔室本体进行了有限元分析。设定真空腔室的夹具和所受外力。将腔室底部固定,上部施加一个大气压1.01×106MPa的压力,使上表面均匀受力,再添加一个重力,G=9.8N/kg。计算得到腔室有限元分析后的应力模型如图6所示。真空腔室本体的最大应力为5.22×107N/m2,远小于屈服应力2.75×108N/m2,其位移最大值为0.38mm,对真空腔室本体的影响很小,模型的强度和变形量在允许范围之内,验证了结构设计的可靠性和合理性。

图6 腔室仿真应力模型
2.2 真空系统
如图7所示,传输腔室的真空系统包括真空管路、门阀、角阀、加热装置等,是实现腔室真空的最重要的部分。通过低温泵的连续抽取,实现内部真空度达2×10-7torr。
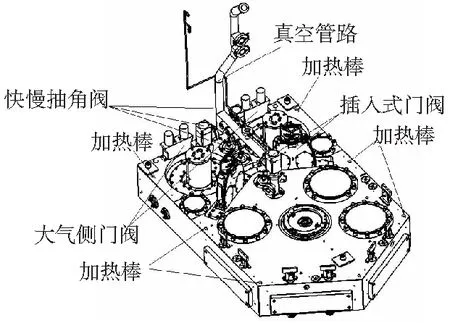
图7 真空系统组成示意图
真空管路安装在真空传输腔室底部,分别与两个缓存腔室和工作腔室连接,真空管路通过前级泵接口与前级泵连接,真空管路通过检漏仪接口与检漏仪连接。真空管路示意图如图8所示。

图8 真空管路示意图
系统要求真空度达到2×10-7Torr,这个真空度主泵需要选用低温泵。为了满足真空传输腔室的真空能力,提高泵抽去真空的速度,必须加速腔室内分子的运动速度,使之活跃起来,而最行之有效的方法是对真空传输腔室进行加热。因此本文设计将八个加热棒,分别安装在传输腔室底部的周围,温控器通过一个热电偶传感器来显示腔室的温度,通过一个热电偶开关来保护腔室的过温保护。传输腔室加热3h内使腔室温度从20℃上升至120℃,为腔室真空的快速实现提供了基础条件。
3 机械手机构优化设计
3.1 真空机械手机构优化设计
为了实现在真空腔室的硅片传输功能,本文采用直接由电机驱动的对称连杆直驱机械手,减少润滑和摩擦产生的污染物,满足真空传输的要求[6]。该机械手可实现垂直升降,旋转和屈伸运动,如图9a所示,对称连杆直驱机械手分为连杆手臂,机架,旋转双电机,垂直升降电机四部分,垂直升降电机可以将整个机械手整体垂直升降,用于取放硅片;旋转驱动选取双电机分别驱动连杆手旋转和屈伸。如图9b所示,连杆手臂由上下大臂,上下小臂和模拟手组成,硅片传输过程中,机械手调整到合适的位置,通过旋转双电机的一个电机旋转,使模拟手对准硅片位置,同时另个电机旋转驱动大臂小臂的转动使模拟手屈伸完成硅片的传输过程。连杆手的上下两小臂之间的旋转通过两个钢带连接,使连杆转动精度更高,模拟手的屈伸更平稳,减少振动,提高硅片传输的成功率。
此机械手可在真空度1.33×10-10Pa环境下正常工作,并不影响传输系统的洁净程度,并且通过直驱和连杆结构的优化设计,此设计可实现机械手的垂直升降高度为35mm,无限制回转,最大的屈伸距离为411mm,预期定位精度为±0.1mm,完全满足符合300mm硅片的传输要求。

(a) 真空机械手主视图 (b) 真空机械手俯视图
3.2 大气机械手机构优化设计
本文设计的大气机械手采用传统的R-θ机械手(径向极坐标型)[5],如图10所示,主要由驱动电机,大臂,小臂和模拟手构成,动力由路斯特电机提供,大小机械臂内有两组同步带组,大臂同步带组的传动比为2:1,小臂同步带组的传动比为1:2,电机驱动大臂构件相对大同步带轮转动,通过大臂同步带组的传递,驱动小臂转动轴的转动,小臂转动轴带动小臂构件相对小同步带轮转动,驱动模拟手的转轴转动,通过两组同步带组传动比的传递,使模拟手中心始终指向机械手的旋转中心,实现大气机械手的屈伸传输动作,设计的机械手最大的伸展范围可达到1010mm,设计的定位精度为±0.1mm。
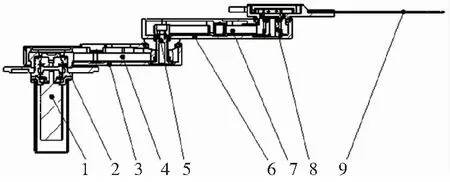
1.驱动电机 2.大臂旋转轴 3.大臂构件 4.大臂同步带组 5.小臂旋转轴 6.小臂构件 7.小臂同步带组 8.模拟手旋转轴 9.模拟手
图10 大气机械手结构示意图
3.3 AWC纠偏检测系统
如图11所示,本文设计的传输系统中,采用8对SICK光电对射传感器(AWC),实现对晶圆的实时检测及位置纠正,提高机械手的安全性,解决了晶圆传输过程中发生的偏位、破损、掉片等异常情况。

图11 AWC纠偏检测系统
AWC传感器为晶圆自动调整对心传感器,既可以检测晶圆是否在传输腔室往工艺腔室进行传输;又可以通过传感器对晶圆的检测,发给真空机械手命令,使其调整中心,使晶圆准确对心放置在工艺腔室中。AWC传感器安装在工艺腔室安装面(传输腔室与工艺腔室连接位置)的传输腔室上下两端,真空传输腔室一共有4个工艺腔室安装面,每一面上安装有2个AWC传感器,共8个AWC传感器。该系统中,采用AWC双传感器放置于需要检测的工位方向(运动的径向直线和晶圆边缘之间),并尽量保证两传感器连线与工位径向垂直,检测方法如图12所示。
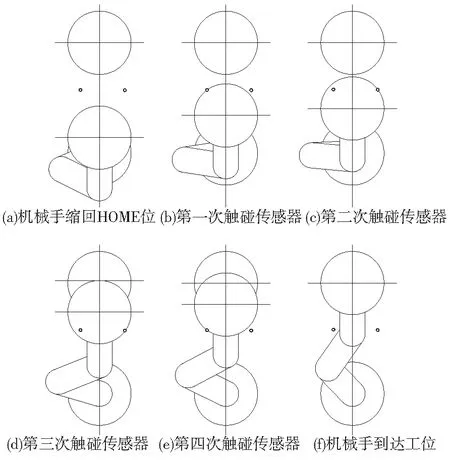
图12 AWC检测原理示意图
4 试验分析
为了验证真空传输平台能否满足设计要求,对本文设计的真空传输平台进行验证性试验,测试内容主要有真空机械手运动范围和定位精度,大气机械手定位精度,真空传输平台的本底真空和漏率。根据得到的测试结果与目标值的对比,验证本文设计的实用性和合理性。试验工具有真空传输平台样机、卷尺,非接触重复定位测试平台、千分表、真空规、检漏仪。
4.1 真空机械手运动范围与精度试验
4.1.1 真空机械手运动范围试验
试验方法如下:
(1)将真空腔室内气压恢复到大气压标准,确认腔室内空气与外界大气相通,真空机械手上电,通过人工控制机械手回到初始位置,再控制旋转轴旋转,验证旋转的范围;
(2)通过人工控制机械手的模拟手伸出腔室,并伸至最大极限位置,用卷尺测量模拟手运动的范围;
(3)通过人工将机械手设置到回缩状态,控制升降轴运动至最高及最低极限位置,用卷尺分别记录位置,验证升降轴运动范围。
重复做30组得到试验结果平均值如表所示,根据试验得到的数据可以看出,真空机械手的运动范围完全满足目标要求。
4.1.2 真空机械手定位精度测试
利用非接触重复定位平台测试平台对真空机械手进行测试,试验方法如下:
(1)对伸缩及旋转精度进行测试时:控制机械手伸缩至测试位置,在手指末端贴上相机识别标签,相机通电,打开Detective软件,调整相机及机械手的位置,使Detective软件的原始图像中在最大范围内仅显示两条纵向标线,切换到二值图像,调节相机焦距、亮度,当画面中的标线清晰、边缘光滑时,用示教盒记录下工位位置,并进行像素标定,旋转轴需单独记录标签到旋转轴的距离;
(2)对升降轴进行测试时:保持机械手位置不动,将千分表竖直置于机械手臂下方,拨动磁性座旋钮固定好,清零,示教机械手下降至压下千分表表针示数2~3mm,用示教盒记录下工位1位置,千分表清零,示教机械手上升至离开千分表表针处,用示教盒记录下工位2位置,打开MarComProf软件;
(3)整体综合重复定位精度:按照(1)、(2)的方法,在同一工位处,完成像素相机、及千分表的设置,示教机器人从初始位置同时经过升降、旋转运动,再依次伸出、下降,达到示教好的工位位置;
(4)在测试作业中加入触发指令,指令前后分别延迟4s,1.5s,然后使机械手自动运行。重复30次,得到试验结果如表2所示,将得到的试验结果与设计指标对比,如表3所示,真空机器手的重复定位精度和整体重复精度均满足设计指标要求。

表2 真空机械手定位精度试验结果

表3 真空机械试验结果与指标对比
4.2 大气机械手精度试验
利用非接触重复定位平台测试平台对大气机械手进行测试,试验方法及过程与4.1.2中真空机械手的精度试验方法相同,经过试验得到结果如表4、表5所示。

表4 大气机械手定位精度试验结果

表5大气机械试验结果与指标对比
4.3 真空传输腔室本底真空测试
为了验证真空传输腔室本底真空能否达到设计要求,在真空腔室内对真空度进行测试,对传输腔室进行抽气,待真空规达到指标且读数稳定后,观测24h,记录压力计值,以最终稳定的压力作为本底真空。经过低温泵11天连续抽取真空,传输腔真空度达到2×10-7Torr,期间真空传输腔室的真空度变化如图13所示(单位Torr)。传输腔达到本底真空2×10-7Torr,关闭腔室阀门后,每隔1min记录一次真空压力值,连续记录10min,如图14所示(单位Torr),计算得到真空度变化平均值为3×10-5Torr/min。
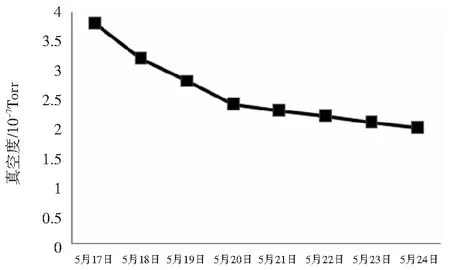
图13 抽取真空时腔室真空度变化曲线

图14 未抽取时腔室真空度变化曲线
4.4 试验结果及分析
通过以上试验,并对试验结果进行与设计指标的对比分析,可以得到本文设计的真空传输平台:
(1)真空机械手的运动范围完全能达到设计目标,整体重复精度达到±0.011mm,远小于设计指标±0.1mm的要求;
(2)大气机械手的整体重复精度为0.080mm,远小于设计指标±0.1mm的要求;
(3)真空腔室的真空度可以达到2×10-7Torr,计算得到真空腔室的真空度变化平均值为3×10-5Torr/min,小于对真空腔室真空度变化设计指标值5×10-5Torr/min,达到了设计目标满足硅片真空传输对真空腔室的要求。
通过试验分析,发现本文设计的真空传输平台可以实现设计功能,整个传输平台的运动范围、传输精度和真空度情况能达到设计标准。
5 总结
本文设计了300mm硅片传输平台,实现了真空传输腔室,大气机械手和真空机械手的优化设计,并设计了AWC自动纠错调整系统,使硅片传输平台的整体的重复定位精度达到±0.1mm,真空传输腔室的洁净等级达到class1,使整个硅片传输过程高精度、高洁净度、高效率,能完成硅片在高度洁净环境中的全自动传输。
[1] 汪劲松,朱煜.我国“十五”期间IC制造装备的发展战略研究[J].机器人技术与应用,2002(2): 5-9.
[2] Chiaki T.The trend of robot technology in semi—conductor and LCD industry[J].Industrial Robot,2001,28(5): 406-413.
[3] 丛明,杜宇,沈宝宏,等.面向IC制造的硅片机器人传输系统综述[J].机器人,2007,29(3): 261-265.
[4] 丛明,杜宇,沈宝宏.硅片传输单元洁净系统的研制[J].半导体技术,2006,31(9): 656-659.
[5]丛明,张士军,金洙吉,等.径向直线运动型硅片机器人的设计与研究[J].制造业自动化,2005(2): 35-37.
[6] 宋吉来, 徐方, 邹风山.基于电流的机器人故障检测与安全保护研究[J]. 组合机床与自动化加工技术, 2016 (7): 56-59.
[7] 王莉,范新丽.工业机器人在硅片传输中的设计及应用[J].自动化技术与应用,2013,32(7): 122-124.
[8] 张忠将.Solidworks2013机械设计从入门到精通[M].北京:机械工业出版社,2014.
(编辑 李秀敏)
Design of 300mm Silicon High-accuracy Wafer Transmission System
LI Xue-wei, HE Shu-long, ZHAO Zhi-guo
(Shenyang Siasun Robot and Automation Co., Ltd., Shenyang 110168, China)
This paper designs a 300 mm silicon wafer handling system, to meeting requirements of the market for silicon wafer transmission process with high precision, high cleanliness and high efficiency. In this paper, silicon wafer transfer chamber was designed with vacuum. The structure of the vacuum chamber was optimized to adapt to 300 mm silicon wafer transmission. Its vacuum degree can be up to 2×10-7Torr.The vacuum manipulator used symmetric connecting rod and direct drive, and the atmospheric manipulator used R-θ type manipulator, The repeat accuracy of manipulators is ±0.1 mm. AWC deviation detection system is designed. The photoelectric correlation sensors are used to achieve real-time detection and correct position of silicon wafer. Through analyzing confirmatory test data, we got the precision,cleanliness,vacuum and value of vacuum changed for the whole system of silicon wafer automatic transmission. It can meet requirements of silicon wafer transmission. The tests verify the rationality of the design.
silicon wafers transmission; vacuum chamber; manipulator; deviation detection system
1001-2265(2017)08-0080-05
10.13462/j.cnki.mmtamt.2017.08.020
2017-04-05;
2017-05-10
国家科技重大专项02专项(2014ZX02103005)
李学威(1975—),男,辽宁北票人,沈阳新松机器人自动化股份有限公司高级工程师,研究方向为机器人技术,(E-mail)lixuewei@siasun.com。
TH166;TG659
A
