目标动态模拟器的五轴运动系统研究与设计*
2017-09-08郭晓晓董登峰周维虎
郭晓晓,董登峰,周维虎
(1.中国科学院 光电研究院,北京 100094;2.中国科学院大学,北京 100049)
目标动态模拟器的五轴运动系统研究与设计*
郭晓晓1,2,董登峰1,周维虎1,2
(1.中国科学院 光电研究院,北京 100094;2.中国科学院大学,北京 100049)
针对空间目标动态光学特性模拟器,设计并实现一套完整的多轴运动控制系统,满足模拟器对各轴低速运动下的平稳性与控制精度要求。采用5个电机分别与减速器相联驱动各输出轴以模拟太阳和空间目标的运动,基于运动控制器TurboPMAC2采用PID+陷波滤波器算法实现各轴独立运动和多轴联动控制,在实际构建的系统上通过最优参数配置验证算法的有效性和系统的可靠性。实验结果表明,五轴同步在1°/s的低速运行状态下速度控制精度均优于0.05°/s,角位置重复定位精度0.008°,充分满足各项运动功能和性能指标要求。为空间目标动态光学特性模拟器的研制提供了重要的技术支撑,促进空间目标探测的理论研究、技术认知和应用扩展。
动态模拟;控制器;五轴运动
0 引言
空间目标光学特性是空间目标探测与识别的基础和依据,对空间态势感知、交会对接、在轨操控与服务等不同的空间任务有重要意义。研究与设计目标动态模拟器,能够为空间目标探测与识别提供研究平台,有效克服外场实验中利用实体目标模拟所造成的耗资大、耗时长等问题,具有周期短、成本低、可靠性高的特点。
目前,空间目标模拟技术是光电设备进行半实物仿真和功能性能测试的必备手段,受到了广泛的重视和研制投入。主要包括采用红外椭球大屏幕的方式实现红外场景的模拟和采用五轴转台式目标模拟装置实现视景仿真。其中红外椭球仿真效果比较好,但耗资巨大,且视场角受到限制;转台式模拟投资较小且能实现很大的视场角,目标模拟装置也可以根据需要进行更换,但是需要自己的目标图像实时生成系统。已开展的工作多缺乏结合缩比空间目标实现的亮度、光谱、动态位置相结合的集成性空间目标光学模拟器。
本文提出的空间目标动态光学特性模拟设备,借助三维动态旋转的缩比目标模型对太阳模拟光谱进行调制,实现目标全方位动态模拟,目标调制光束通过收集器和平行光管准直输出,完成远距离动态目标的模拟输出。其中,设计多轴运动协同控制系统进行准确的空间目标姿态模拟、相对位置的控制,以接近真实的状态模拟目标光学特性的动态演化过程,为空间目标动态光学特性模拟器研制提供关键技术支撑。
1 系统结构设计
本系统采用TurboPMAC2作为控制器,通过3个伺服电机和2个步进电机驱动机构以及减速器构建的一套五轴(模拟太阳运动的S-1、S-2轴,模拟目标运动的T-1、T-2、T-3轴)运动控制系统,实现模拟光源的4自由度和模拟目标的6自由度运动。动态模拟组件结构示意如图1所示。在此运动机构中,每个电机虽然相对独立,但其对力的加载情况、运动速度与方向等因素对运动机构产生共同作用,实现电机的协同控制是保证动态模拟的重要条件。此外,光源与目标的运动速度不超过1°/s,速度控制精度0.05°/s,角位置控制精度0.008°,保证低速运动的稳定性是多轴运动协同控制的一个难点。

图1 动态模拟组件结构示意图
在本控制系统中,硬件可分为4层。自上而下,第1层是主控层即工控机;第2层是从控层PMAC控制器,包括控制、数据采集、模拟量输出等;第3层是驱动层,包括伺服驱动器和步进驱动器;第4层是执行层电机、减速器、编码器。
在VisualStudio2010开发环境下利用C语言及PCOMM动态链接库函数创建友好的人机界面。上位PC端具有开放性、实时性、多线程性的特点。TurboPMAC2控制器通过PCI总线与PC进行双向交互。在PC端输入位置、速度、加速度指令发送到控制器;PMAC是运动控制系统的运行控制级,与电机驱动相连构成运动轴的闭环伺服控制回路,从伺服驱动器、编码器采集各轴位置、速度信息和状态信号等现场数据进行分析计算、程序执行、运动控制,并将其返回PC完成实时通信。五轴协同运动控制系统组成如图2所示。

图2 五轴协同运动控制系统组成框图
五轴运动部件分别采用2个高细分步进电机和3个交流伺服电机,其中交流伺服电机a驱动S-1轴旋转,步进电机b驱动S-2轴带动光源在S-1上运动,a、b共同作用实现光源的空间4自由度运动;交流伺服电机c、d和步进电机e依次驱动T-1、T-2、T-3轴,使模拟目标绕空间坐标系X、Y、Z轴旋转,实现6自由度运动。并根据系统技术指标要求,在各轴输出端设计减速器和零位开关,实现低速运行和机械零位标定与限位。系统整体实物图如图3所示。
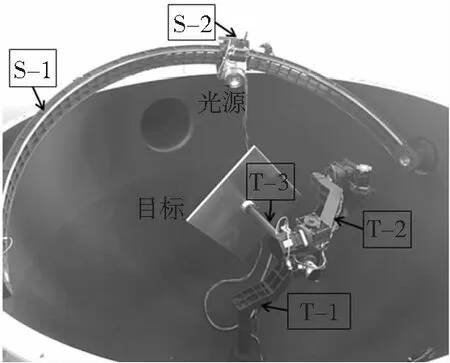
图3 五轴运动协同控制系统实物图
2 控制原理
本系统采用TurboPMAC2控制卡实现对三台交流伺服电机和两台步进电机的协同控制,电机数目仍可进行扩展,控制原理框图如图4所示。
图4中,Kp为比例增益,提供与跟随误差成正比的输出,其值越大,刚性越大;Kd为微分增益,提供与实际速度成正比的输出,数值越大,系统阻尼越大;Ki为积分增益,提供与位置误差积分成正比的输出,其值越大,静态位置误差越小;Kvff速度前馈增益,提供与命令速度成正比的输出,其值越大,微分增益引起的跟随误差越小;Kaff加速度前馈增益,提供与要求加速度成正比的输出,可以减少由系统惯性引起的跟随误差;IM控制积分模式选择,当IM=1时,只有当所要求的速度为零时,位置误差积分打开,当IM=0时,位置误差积分一直有效。PMAC运动控制器提供PID+陷波滤波算法。陷波滤波是一种特殊的带阻滤波,其阻带在理想情况下只有一个频率点,频率响应如式1所示。主要用于系统存在滞后、静摩擦、回差等问题使系统产生机械谐振而破坏系统特性时。图4中,n1、n2、d1、d2分别对应控制卡中Ix36、Ix37、Ix38、Ix39,滤波器的传递函数如式(2)、式(3)所示。在反馈控制中,陷波滤波器可以消除物理共振,通过上位软件设置机械共振频率,PMAC可执行程序根据所要求的带通带阻滤波器特性,自动计算出系数后下载并执行。
(1)

(2)
(3)
光电编码器采集电机的输出位置信号,在控制卡内微分转换为速度信号,同时与给定位移信号和测量信号作比较,差值再参与控制卡内算法的运算。控制算法中包含了PID、负反馈、速度/加速度前馈、陷波滤波算法,使系统抗干扰能力增强,满足使用需求。算法输出公式如式(4)所示。

图4 PMAC的PID+陷波滤波器算法
(4)
式中,DACout(n)是控制器中的16位模拟电压,在接受位置命令时乘以一个放大系数Ix08,在控制速度环也有一个速度放大系数Ix09;FE(n)是伺服周期n内所得的跟随误差;AV(n)、CV(n)、CA(n)、IE(n)分别是伺服周期n内的实际速度、指令速度、指令加速度、跟随误差积分。控制器参数Ix30、Ix31、Ix32、Ix33、Ix34、Ix35分别设置Kp、Kd、Kvff、Ki、IM、Kaff。
通过最具代表性的阶跃响应曲线和正弦响应曲线调整参数,反应系统动静态特性。阶跃响应曲线主要调节Ix30、Ix31、Ix33,以调整系统静态特性,测试系统的上升时间、调节时间、峰值时间、超调量、系统带宽。正弦响应曲线主要调节Ix32、Ix35、Ix68(摩擦前馈增益),以调整系统动态特性至跟随误差曲线稳定且误差范围较小。五轴运动控制系统中各轴最佳参数均不同,经调整测试,保证各轴均达到极佳动静态特性。图5所示为本系统得出的较为理想的阶跃响应与正弦响应曲线(以S-1轴为例)。
图5a所示阶跃响应下,上升时间0.038s,峰值时间0.229s,阻尼比1,自然频率14.7Hz,调节时间0.065s。抛物曲线响应下,当电机加速、速度方向不改变时引起电机跟随误差减小并趋于0;在电机启动瞬间、速度方向改变以及减速停止时出现较大跟随误差。由于伺服电机a通过600:1的减速器与S-1轴单端驱动,图5b所示最大跟随误差20.19cts,具有较好的跟踪性能。

(a)阶跃响应曲线

(b)正弦响应曲线图5 参数调整曲线图
3 上位软件设计
趋势线寿命评估方法的理论模型是要充分利用响应变量的大多数对单个观测值的响应变量进行预测,因此在明确容忍区间和正态总体的容忍区间概念的基础上,需要建立回归函数值的容忍区间。
控制软件是在VisualStudio2010开发环境下利用VC编写上位机操作界面。结合PCOMM动态链接库函数实现电机的运动指令、程序控制与运动状态信息的反馈控制。控制软件流程图如图6所示。

图6 控制软件流程图
根据流程图编写上位控制界面,可通过五轴的单独操作框实现各轴的独立正、反转、以给定参数运动到指定位置等功能,实时更新运行速度与位置等状态信息。因PMAC支持JOG模式、运动程序以及PLC程序执行,故也可根据运动曲线要求将各轴定义到坐标系,编写运动程序并下载到PMAC控制卡执行程序,实现多轴协同运动。运动控制过程中采集速度、位置信息并显示。上位机控制界面如图7所示。
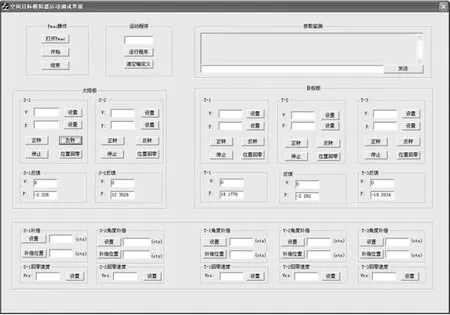
图7 上位控制界面图
4 实验与分析
以伺服电机a(S-1轴)为例,球体正上方为零位(如图8所示)作为实验的初始位置,逆时针方向为正向。
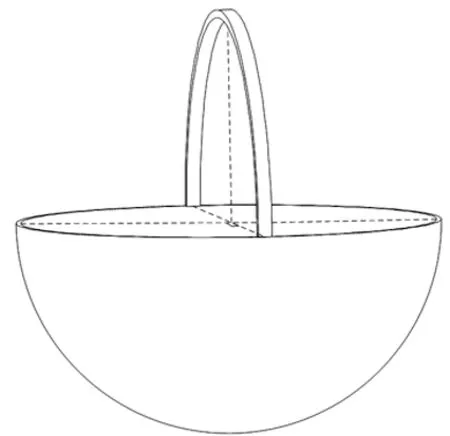
图8 S-1轴零位示意图
首先将测量范围30°~-150°分成多个测量点依次为:30°、0°、-30°、-60°、-90°、-120°、-150°,其后令S-1轴以1°/s的速度运动到规定测量点,往返多次测量,求取平均值,误差记录结果如表1所示。同理,以T-2为例,将其运动范围-90°~90°分成多个测量点依次为-90°、-60°、-30°、0°、30°、60°、90°,误差记录结果如表2所示。

表1 S-1轴测量点误差表

表2 T-2轴测量点误差表

(5)
从表1计算可得,多次多点测量的重复定位平均误差为8.7620cts,参照公式(5)转换,即0.00064°。表2所示T-2轴在1°/s时重复定位平均误差为77.67257cts,即0.00568°。
系统的速度跟随误差测量方法为:S-1、T-2分别以恒定速度1°/s逆时针方向连续运行,实时采集实际运行速度,速度-时间图如图9所示,速度跟随误差曲线如图10所示。
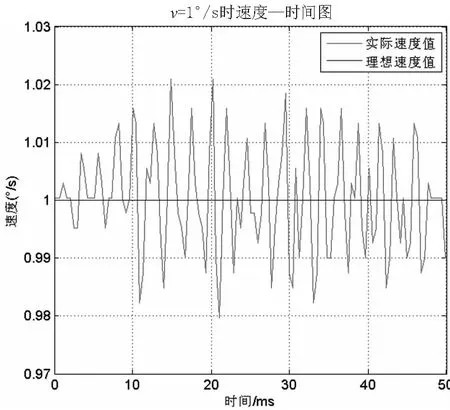
(a)S-1轴速度-时间图

(b)T-2轴速度-时间图图9 速度-时间图

(a)S-1轴速度跟随误差曲线图
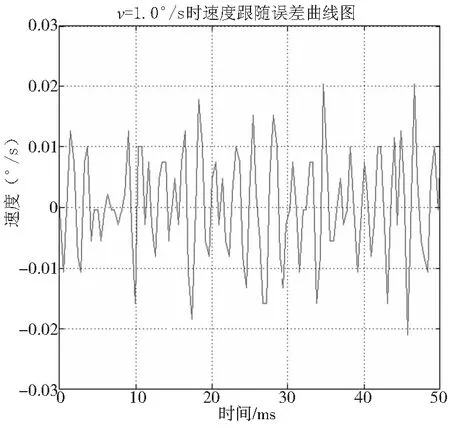
(b)T-2轴速度跟随误差曲线图图10 速度跟随误差曲线图
从图9与图10可知,当运动速度为1°/s时,S-1轴与T-2轴的速度跟随误差均小于0.022°/s,满足系统的精度要求。控制系统的精度与驱动器、电机选型等硬件条件有密切关系,此外,寻找最优参数实现算法执行是实现高精度控制的重要环节。
5 结束语
本文以TurboPMAC2为主控制器,研究并设计了一套五轴运动控制系统,用于空间目标动态光学特性模拟,实现光源和模拟目标的运动与其空间姿态模拟。本系统在1°/s的低速状态下重复定位误差小于0.008°,速度控制精度优于0.05°/s,满足系统各项指标。以本系统为主要运动组件的模拟器能采集到太阳、目标不同位置关系,以及目标在不同姿态时的动态光学特性,为空间目标动态光学特性模拟器的研制提供了重要的技术支撑,同时也为空间光电探测载荷提供了与实际应用具有相似光学特性的目标,满足光电探测载荷的功能和性能测试需求。
[1] Li Lin,Li Yong,Wen Liwei,et al. PMAC-based Tracking Control System for 8-axis Automated Tape-laying Machine[J].Chinese Journal of Aeronautics, 2009(22):558-563.
[2] 刘恒, 李生刚, 孙业国,等. 带有未知非对称控制增益的不确定分数阶混沌系统自适应模糊同步控制[J]. 物理学报, 2015, 64(7):331-334.
[3] 窦伟, 赵新华, 李振华. 基于VC++与PMAC 的机器人控制软件的开发[J]. 天津理工大学学报, 2010, 26(3):58-61.
[4] 王秋生, 袁海文. 数字双频陷波滤波器的优化级联设计方法[J]. 仪器仪表学报, 2012, 33(12):2641-2646.
[5] 李永泉, 王艮川, 葛会亮,等. 基于PMAC的球面5R并联机构运动控制分析[J]. 机械设计与研究, 2014(6):13-17.[6] 张凌悦, 李慧媛.基于PMAC的双轴运动控制系统的软件开发[J]. 工业控制计算机, 2015(8):118-119.
[7] 潘光, 魏静. 一种分数阶混沌系统同步的自适应滑模控制器设计[J]. 物理学报, 2015, 64(4):040505.
[8] Jun Yuan, Junzhi Yu, Zhengxing Wu, et al. Precise palanar motion measurement of a swimming multi-joint robotic fish[J]. Science China Information Sciences, 2016, 59(9):92208.[9] 李鑫, 杨开明, 朱煜,等. 平面电机自适应加速度前馈运动控制[J]. 电机与控制学报, 2012, 16(9):95-102.
[10] 刘恒, 李生刚, 孙业国,等. 带有未知非对称控制增益的不确定分数阶混沌系统自适应模糊同步控制[J]. 物理学报, 2015, 64(7):331-334.
[11] Guan Junbiao. Synchronization Control of Two Different Chaotic Systems with Known and Unknown Parameters[J]. Chinese Physics Letters, 2010, 27(2):25-28.
[12] Toliyat H A, Hao L, Shet D S, et al. Position-sensorless control of surface-mount permanent-magnet AC (PMAC) motors at low speeds[J]. IEEE Transactions on Industrial Electronics, 2002, 49(1): 157-164.
(编辑 李秀敏)
Research and Development of a Five-axis Motion System for the Target Dynamic Simulator
GUO Xiao-xiao1,2, DONG Deng-feng1, ZHOU Wei-hu1,2
(1.Academy of Opto-electronics, Chinese Academy of Sciences, Beijing 100094, China;2.University of Chinese Academy of Sciences, Beijing 100049,China)
According to the simulator of spatial targets’ dynamic optical properties requirements, a complete set of multi-axis coordinated control system is designed and implemented to meet the axis’ requirements of the good stability and high precision at low speeds. Based on the multi-axis controller named TurboPMAC2 using PID control strategy and a notch filter algorithm, a simulator using 5 servomotors that is connected with speed reducers to drive the output axis was implemented to simulate the motion of both the sun and the space target. On the actual system, the validity of the algorithm and the reliability of the system are verified by the parameters configuration. Experiment results indicate that the velocity control precision is higher than 0.05°/s and the repetitive positioning precision is better than 0.008°when it is running at a low-speed of 1°/s. The system fully meets the performance index and achieves the motion control functions. Besides, it provides an important technical support for the simulator of the dynamic optical properties and promotes the theoretical research, the technology learning and the expansion of the application for detecting spatial targets.
dynamic simulation; controller; five-axis motion
1001-2265(2017)08-0059-05
10.13462/j.cnki.mmtamt.2017.08.015
2016-11-08;
2016-12-14
中国科学院科研装备研制项目(YZ201310)
郭晓晓(1993—),女,河南南阳人,中国科学院大学硕士研究生,研究方向为光电测量与控制,(E-mail)hgdguoxiaoxiao@163.com;通讯作者:周维虎(1962—),男,安徽芜湖人,中国科学院光电研究院研究员,博士,研究方向为光电精密测量,光机电一体化,(E-mail)zhouweihu@aoe.ac.cn。
TH166;TG659
A
