三自由度磁力驱动平台的实验研究*
2017-09-08吴利平金嘉琦
孙 凤, 吴利平,李 东, 李 强, 佟 玲,金嘉琦, 张 明
(1.沈阳工业大学 机械工程学院, 沈阳 110870; 2.中国华录 松下电子信息有限公司,辽宁 大连 116023; 3.东北大学 机械工程与自动化学院, 沈阳 110819)
三自由度磁力驱动平台的实验研究*
孙 凤1, 吴利平1,李 东2, 李 强1, 佟 玲1,金嘉琦1, 张 明3
(1.沈阳工业大学 机械工程学院, 沈阳 110870; 2.中国华录 松下电子信息有限公司,辽宁 大连 116023; 3.东北大学 机械工程与自动化学院, 沈阳 110819)
文章介绍了一种永磁弹簧自复位的三自由度磁力驱动平台,该平台由3对差动电磁铁组和永磁弹簧自复位结构组成。3对电磁铁组分别为X方向的两对电磁铁组和Y方向的一对电磁铁组,可以实现X、Y方向的平动和C轴的转动;永磁弹簧自复位结构由3对均布的永磁体组构成。建立三自由度磁力驱动平台的动力学模型,搭建控制器,并利用dSPACE1104系统为核心控制器进行X、Y平动方向和C轴转动的驱动实验。分析对比了阶跃输入时,X、Y方向平动和C轴转动的响应结果,分析了实验平台的结构对实验结果的影响,实现了三自由度磁力驱动平台的稳定驱动,结果说明该驱动平台响应特性较好。
电磁驱动;PD控制;数学模型;差动控制
0 引言
传统的运动平台,各部件之间存在运动摩擦副,定位精度低,响应速度慢[1]。电磁悬浮驱动技术是利用电磁力作为驱动力的无接触驱动技术,其特点是中间传动环节少,结构简单,不产生机械接触摩擦,无灰尘,无需润滑,易于实现紧凑型的多自由度驱动等优势,可在一定程度上弥补传统驱动技术的不足[2-5]。
由于电磁驱动技术具有以上特点,国内外的研究机构对其进行了广泛关注,并取得了许多研究成果。其中麻省理工学院的学者们制造的世界第一台高精度六自由度磁悬浮平面电机[6],其采用Halbach永磁体阵列的方式,定子线圈即产生水平驱动力,同时产生悬浮力,定位精度达到了5nm。韩国忠州大学的学者设计磁悬浮定位平台[7]采用两个部件分别实现悬浮和驱动,这种结构系统控制较为简单,但线性度不好。长春光机电所的学者设计的二维磁悬浮工作台[8]通过层叠式的结构来间接定位,可以实现平面XY运动。中南大学的学者构建了一种新型磁悬浮运动平台[9]进而实现了大行程、高精密电磁驱动。
本文介绍了三自由度电磁驱动平台的结构,采用3对差动电磁铁实现了X、Y方向平动以及C轴的转动,利用3对均布的永磁体构成永磁弹簧,实现自复位,并且使驱动平台的结构更为紧凑。对三自由度磁力驱动平台进行数学建模,并利用dSPACE1104系统为核心控制器进行实验分析,对该驱动器的响应特性进行了实验研究,以期在微动平台的实际工程应用中提供重要的参考。
1 驱动器结构及工作原理
三自由度磁力驱动平台结构如图1 所示[10]。该装置由电磁铁,上顶盖,下底盖,环形永磁体,柱形永磁体和平面球轴承组成。
图1a表示水平方向的3对6个电磁铁的差动结构的布置。图1b表示该装置的支撑部分,由上顶盖,下底盖,环形永磁体,柱形永磁体和平面球轴承组成。环形永磁体和柱形永磁体为一组,其轴线同心,磁极同级相对,设置3组。将去掉一个轴承端盖的平面球轴承沿下底盖和上顶盖的中心均匀对称安装在下底盖上,设置3组;永磁体组与平面球轴承交替均匀分布在下底盖上。每组永磁体间在竖直方向上表现为吸引力,在水平任意方向上表现为斥力,这样永磁弹簧的上顶盖和下底盖间在轴向方向上形成一定刚度,以保证上顶盖在轴向方向上不会发生窜动。
该平台在平动平面内,可以沿着X方向,Y方向移动和C向转动。实现该平台的稳定响应由X方向2对,Y方向1对,3对共6个电磁铁组成差动式电磁铁对实现,X、Y方向的位置由电涡流传感器实时监测反馈。C向转动由X、Y方向的联动实现。
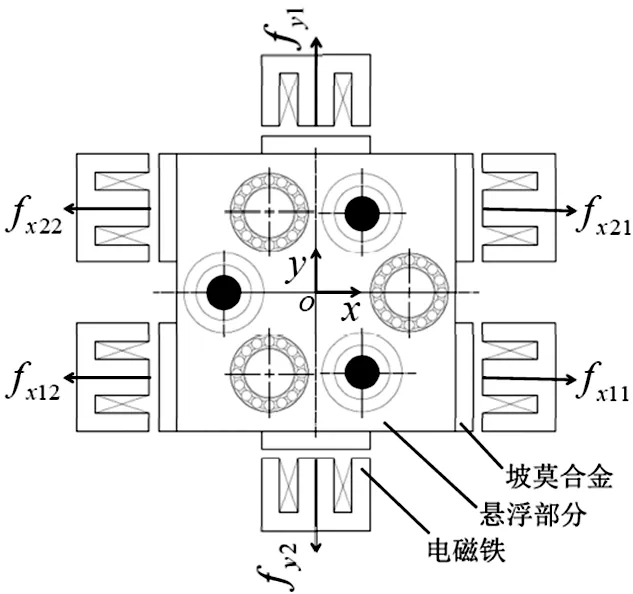
(a)电磁铁的差动结构布置图
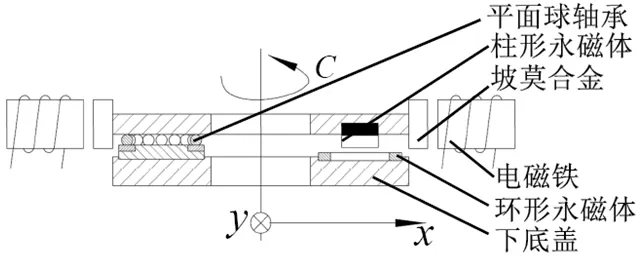
(b)支撑部分结构图图1 电磁驱动器结构图
2 系统动力学模型的建立
如图2所示,根据系统的结构,取处于平衡位置时的微动平台的质心o为笛卡尔坐标原点,其坐标为(x,y)。在微动平台运动过程中,电磁控制力、永磁弹簧回复力、摩擦阻力的合力使得微动平台的质心偏离平衡位置,移动到o′。其中微动平台沿Y方向的位移为y,沿X方向的位移为x,绕C轴转动的角度为θ。

图2 系统受力分析图
根据系统的结构和物理参数以及系统的力学特性,设与传感器相对的气隙变小的方向为正,系统微动平台质心沿逆时针方向回转方向为正。
设质心o的广义坐标为:
(1)
微动平台相对6个电磁磁极与3个传感器的广义坐标为:
(2)
两广义坐标的变换关系为:
(3)
由于电磁铁是一种非线性的执行机构,可通过合理的结构设计并采用差动式控制方式,使其在工作点附近具有良好的线性,单自由度差动控制系统原理图如图3所示。
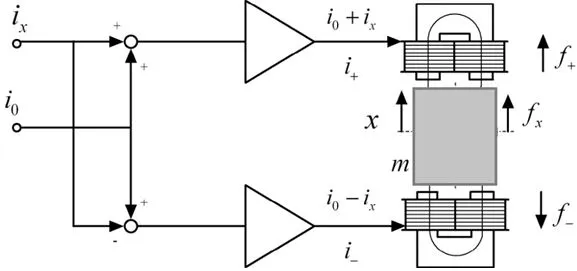
图3 差动式电磁铁工作原理
单个电磁铁驱动力为:

(4)
如图1a中所示,fx11和fx12,fx21和fx22,fy1和fy2分别为3对差动电磁铁的受力分析,其中X方向以fx11所表示的方向为正方向,Y方向以fy1所表示的方向为正方向。由于差动电磁铁的受力分析在方法上类似,因此以fx11和fx12所表示的这对差动电磁铁为例,计算单对差动电磁铁驱动力[11]为:

(5)
将fx+、fx-在(x,i)=(0,0)处展开成一阶泰勒级数,并略去高阶小量得:

(6)

利用拉格朗日原理进行分析,得出系统拉格朗日方程为:
(7)
式中,m为微动平台动子部分质量,kx为X方向的位移刚度系数,ky为Y方向的位移刚度系数,kt为永磁弹簧的刚度系数,c为摩擦力系数。
根据本系统的动力学方程建立本系统的状态空间方程:

(8)
其中,x为状态变量,u为输入电流,y为输出位置。
(9)
对式子进行求解,得出:

(10)
3 控制系统的建立
电磁悬浮驱动器的整体控制框图如图4所示,电磁铁1,2构成差动电磁铁组(1);电磁铁3,4构成差动电磁铁组(2);电磁铁5,6构成差动电磁铁组(3);电磁铁组1,2一起控制X方向的转动和X方向的平动;电磁铁组3控制Y方向的平动。利用电涡流位移传感器对坡莫合金与电磁铁端面间的气隙进行位置测量,进行反馈,并通过PD控制器对每对电磁铁组合实时差补控制。
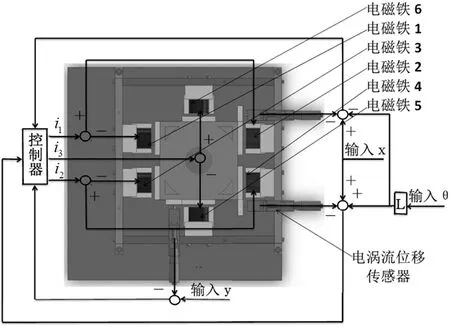
图4 系统控制结构图
4 磁力驱动实验
研制的实验装置如图5所示。图5a为实验平台的执行装置;图5b为实验平台的控制的硬件部位。根据搭建好的实验平台,构建控制系统单元。控制器使用dSPACE1104;位移传感器选用非接触电涡流位移传感器,可检测系统位置输出;放大器选用E120/06电磁轴承功率放大器,可对输入的信号进行放大。按照电磁驱动器结构原理图进行实验平台的搭建,反复调试实验装置后,分别对X、Y平动方向和C轴转动方向进行位置控制实验研究。
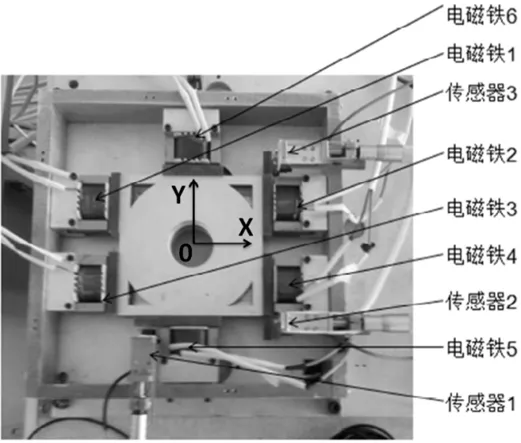
(a)实验平台执行装置图

(b)实验平台的控制硬件部件图5 实验装置
4.1 Y方向位置控制实验
对Y方向进行位置控制实验,实验条件如下:首先,给Y方向一对差动电磁铁接输入偏置电流1.2A,使实验平台在Y方向上有电磁刚度,调整电涡流位移传感器,使得检测的位置信号和系统中的设定值在数值上是相等的。当系统稳定后,给予0.1mm的阶跃信号。观察系统在平衡位置对信号的响应情况。
如图6所示依次是阶跃输入信号,控制电流,传感器检测的位置信号,线圈5的电流,线圈6的电流。当输入一个0.1mm阶跃信号时,系统控制电流增大;传感器反馈的信号经过两次波动达到稳定值;线圈5和线圈6的电流分别与控制电流进行运算,使驱动平台Y方向平动0.1mm;控制电流初始值不为0是因为实验平台的安装并非完全对称。传感器反馈经过两次波动达到稳定值是因为实验平台并非理想情况,存在摩擦力,在系统即将达到新的平衡时,摩擦力对实验平台的作用方向发生了一次改变。实验的响应时间较长,是由于平面球轴承的摩擦力较大,使得系统阻尼较大。
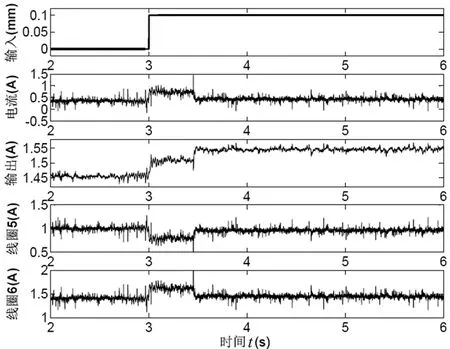
图6 Y向0.1mm阶跃信号系统输入输出图
给Y方向输入两个0.1mm阶跃信号时,如图7所示依次是阶跃输入信号、控制电流、传感器检测到的位置、线圈5中的电流、线圈6中的电流。从图中可以看出,本系统对多次位置信号都有很好的跟踪响应特性,说明该系统可以实现非接触式位置精确控制,可以达到实验与工程要求。

图7 Y向两次0.1mm阶跃信号系统输入输出图
4.2X方向位置控制和转角控制实验
对X方向进行位置控制和转角控制实验。实验条件如下:首先,给X方向2对差动电磁铁输入偏置电流1.2A,使实验平台在X方向上有电磁刚度。调整X方向上2个电涡流位移传感器,使得检测到的位置信号和设定值在数值上相等。当系统稳定后,第3.3s时,给系统输入0.1mm阶跃信号;观察系统在平衡位置对信号的跟踪情况,X方向的两组差动电磁铁都接收到0.1mm位移信号,经过PD运算,两组控制电流分别与对应的电磁铁进行运算。得到实验数据如图8所示。
第11.6s时,给系统一个0.7°的转角,相当于X1方向输入-0.1mm阶跃信号;X2方向输入0.1mm阶跃信号,得到的实验数据如图8所示。
从图8中可以看出,在第3.3s,给电磁铁组1,2同时输入0.1mm阶跃后,两个电磁铁组的控制电流都增大,线圈1和线圈2中电流分别与控制电流1进行加减运算;线圈3和线圈4的电流分别与控制电流2进行加减运算,使得驱动平台向X方向平动0.1mm。
如图8所示,在第11.6s,给两组电磁铁组同时输入相反的0.1mm阶跃后,可以看出控制电流减小,线圈1和线圈2的电流与控制电流1进行加减运算;控制电流2继续增大,线圈3和线圈4与控制电流2进行加减运算,两组电磁铁共同作用,使得驱动平台绕C轴转动0.7°。
从系统的输入输出可以看出,本系统X方向有较好的位置响应特性和位置控制特性,可以通过两组差动电磁铁组接通不同的控制电流实现转角的控制。但从图8可以看到,在第3.3s输入阶跃信号后,系统输出并未严格达到0.1mm,并且X2和X1两个位移量也不是完全相等的。这是由于3组永磁体装配时未能严格对称,导致平动平台初始位置并没有严格在几何中心。比较图7和图8,当给系统输入两次阶跃信号时,图7中控制电流是经过一次波动值,然后恢复至稳定值,而图8中控制电流没有波动直接变化到稳定值。这是由于平动平台的支撑部位有环形永磁体,使系统阻尼增大,对平台上面的驱动电磁铁组有一定干扰,而X方向为2对4个差动电磁铁组,产生的电磁力相对Y方向的1对2个差动电磁铁组的电磁力较大,环形永磁体对其影响较小。
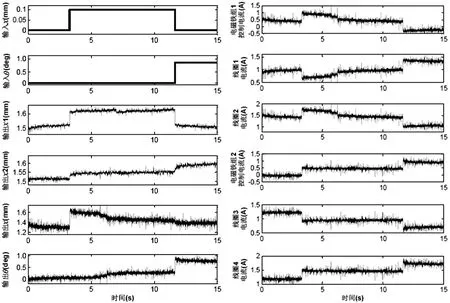
图8 X方向平动和C轴转动系统输入与输出对比图
5 结论
本文对驱动器控制系统进行了力学分析和动力学模型的建立,采用差动控制的方法对驱动器进行X、Y方向平动和C轴转动的驱动实验,在不同扰动下,对三自由度磁力驱动平台的响应特性进行了实验分析。分析结果表明: 该驱动器可以实现X、Y方向的平动和C轴转动三个自由度的运动,但在C轴的转动方向实验中,存在X方向两组差动电磁铁耦合现象。实验数据表明:该驱动器位置响应特性和位置控制特性较好。
[1] 卢礼华,梁迎春,于福利,等. 传统控制器实现有摩擦系统的大行程纳米定位[J]. 纳米技术与精密工程,2010,8(1):1-6.
[2] 张士勇.磁悬浮技术的应用现状与展望[J]. 工业仪表与自动化装置, 2003(3):63-65.
[3] 王军,徐龙祥.磁悬浮轴承开关功率放大器系统建模及控制研究[J].中国机械工程,2010,21(4):477-481.
[4] 刘小静,胡业发,张薇薇,等.磁悬浮系统结构静刚度与结构动刚度测量实验[J]. 中国机械工程, 2010, 21(8):908-912.
[5] 孙凤,王亚刚.悬挂式永磁悬浮系统的悬浮特性研究[J].组合机床与自动化加工技术, 2011(11):25-28.
[6] Won-jong Kim, David L Trumper. High-precision Magnetic Levitation Stage for Photolithography[J]. Precision Engineering, 1998, 22(2): 66-77.
[7] KWANG S J, YOON S B.Precision Stage Using a Noncontact Planar Actuator Based on Magnetic Suspension Technology[J]. Mechatronics, 2003, 13(8/9) : 981-999.
[8] 王延风,卢志山,宋文荣,等. 磁悬浮纳米级步进扫描工作台CAD/CAE 设计研究[J]. 机械设计与研究, 2004, 20(1): 77-81.
[9] 段吉安,齐斌,廖平.新型磁悬浮运动平台力学分析与控制[J].控制工程, 2009, 16(2):151-158.
[10] 孙凤,张明,孙兴伟,等.三自由度等刚度永磁弹簧的力学特性研究[J].中国机械工程, 2015,26(8):1005-1009.[11] 虞烈. 可控磁悬浮转子系统[M].北京:科学出版社,2003.
(编辑 李秀敏)
Experiment Study on 3-DOF Magnetic Driving Platform
SUN Feng1, WU Li-ping1, LI Dong2, LI Qiang1, TONG Ling1, JIN Jia-qi1, ZHANG Ming3
(1.School of Mechamical Engineering, Shenyang Unniversity of Technology, Shenyang 110870, China;2.China Hualu·Panasonic Avc Networks Co.,Ltd., Dalian Liaoning 116023,China)
This paper introduces a 3-DOF magnetic driving platform with self-centering permanent magnetic springs. This platform is composed of three differential electromagnet groups and the self-centering permanent magnetic springs. Three pairs of electromagnet groups realize the translation inX,Ydirection and the rotation withC-axis; the self-centering permanent magnetic springs consist of three pairs of uniform permanent magnets. 3-DOF dynamic model of magnetic driving platform and control system are established and the dSPACE1104 system is used as the core controller. Finally, the driving experiments were carried out with the experimental prototype inX,Ytranslational directions and the rotational direction withC-axis. The results indicate that the experiment has achieved a stable driving control with the 3-DOF magnetic driving platform.
electromagnetic drive; PD control; mathematical model; differential control
1001-2265(2017)08-0055-04
10.13462/j.cnki.mmtamt.2017.08.014
2016-08-15;
2016-10-26
国家自然科学基金(51105257, 51310105025)
孙凤(1978—),男,满族,辽宁阜新人,沈阳工业大学副教授,博士,研究方向为磁悬浮技术与数控技术,(E-mail)sunfeng@sut.edu.cn。
TH122;TG65
A
