无人机某工作点下纵向增稳回路在传感器失效下的容错控制设计
2017-09-06何金阳
何金阳
摘 要 本文基于被动容错的参数空间法,研究了无人机某工作点下纵向增稳回路在传感器失效下的容错控制设计,完成了控制器参数设计,并对仿真的结果进行了分析。
关键词 飞行控制系统 参数空间法 容错控制
中图分类号:TP273 文献标识码:A DOI:10.16400/j.cnki.kjdkz.2017.07.017
0 引言
为了保证系统在元器件正常和故障运行下的安全性和基本性能,容错控制设计已经在过去的二十年中得到了足够的重视。现在,已出现两种比较完善的解决鲁棒控制器设计问题的方法:一种是以算子理论和H∞理论为基础的鲁棒控制理论,较好地解决了当正常系统G(s)存在附加未建模动态△(s)时系统的分析和综合问题。另一种以参数空间方法和极点配置理论为基础的鲁棒控制理论,较好地解决了参数有界不确定性和多模系统的分析和综合问题。
1 参数空间法理论
目前,参数空间方法形成了频域分析方法和时域分析与设计方法等理论体系。其中,参数空间方法在频域分析与设计方法也称为代数多项式法,主要研究开展系统的传递函数的特征多项式的系数摄动对系统稳定性的影响。时域方法主要研究状态方程矩阵元素摄动对系统稳定性的影响。
考慮一连续或离散单位闭环反馈系统,前向通道的GH(s)模块是系统的开环传递函数(包括控制器),系统的特征方程可表示为
2 运用参数空间法的算例
研究无人机某工作点下纵向增稳回路在传感器失效下的容错控制设计,无人机纵向通道增稳回路采用加速度反馈和俯仰角速率反馈。
无人机纵向增稳回路状态反馈矩阵,传感器为速率陀螺和法向加速度表。
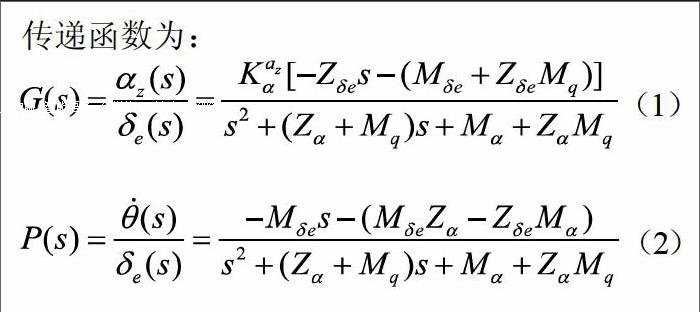
传递函数为:
给定相关参数后,利用参数空间方法进行计算。
由图1、图2可以看出当取控制器参数为(-0.0567,-3.485)时,可以满足系统的容错控制。当此时发生加速度传感器失效故障,即意味着控制器参数为(0,-3.485),此时无人机对应的性能区域为2,此时无人机飞行品质明显下降,但闭环系统仍是稳定的。当此时发生速度陀螺传感器失效故障,即意味着控制器参数为(-0.0567,0),此时无人机对应的区域为3,满足一定飞行品质。
对该系统进行仿真后,相应的阶跃响应图如图3、图4:
3 结论
高空长航时无人机可以实现对加速度表传感器失效的鲁棒容错控制,仿真可知,当加速度表传感器失效后,无人机仍具有一定的飞行品质,系统仍是稳定,这为无人机故障诊断、控制律重构提供了前提。而俯仰角速率陀螺传感器一旦失效,虽然系统仍是稳定的,但对系统的品质影响较大,因此,在进行无人机容错控制系统设计时对俯仰角速率陀螺可采取硬件冗余等措施来提高其可靠性。
参考文献
[1] 金小峥,杨光红,常晓恒,车伟伟.容错控制系统鲁棒和自适应补偿设计[J].自动化学报,2013(1):31-42.
[2] 樊方星,杨军.参数空间法在倾转旋翼机飞行控制系统设计中的应用[J].弹箭与制导学报,2006(S6):349-350,353.endprint
