基于Harr-NMF特征的车辆检测算法研究
2017-09-04刘志成杨慧萍李泽西
胡 杰,刘志成,杨慧萍,李泽西
(武汉理工大学 汽车工程学院,湖北 武汉 430070)
基于Harr-NMF特征的车辆检测算法研究
胡 杰,刘志成,杨慧萍,李泽西
(武汉理工大学 汽车工程学院,湖北 武汉 430070)
为了提高车辆检测的准确率和效率,为智能交通系统提供可靠的参考信息,针对传统Harr特征车辆检测算法存在特征向量维数过大、训练时间过长的问题,提出采用非负矩阵分解Harr特征得到低维的Harr-NMF特征,对Harr-NMF特征分类并由Adaboost算法训练得到基于Harr-NMF特征的车辆分类器,对车身进行有效识别。针对实车测试时出现的重复检测、错误检测等问题,进一步优化了算法。测试结果表明,改进后的算法提高了车辆检测率并有效降低了误检率。
智能交通;车辆检测;Harr-NMF特征;Adaboost算法
1 引言
为缓解日益严重的交通压力,加强道路监控,智能交通受到越来越多的重视。智能交通以视频采集到的图像为分析对象,通过对视频中特定区域的图像进行分析得到道路交通信息。然而无论是对道路的车流量、车型、道路拥堵状况的预估,还是将采集到的信息给驾驶员作驾驶预判等,都离不开对道路车辆的检测[1]。
车辆检测作为目标检测的一个分支研究领域,不断涌现出了新的研究方法。文献[2]提出利用帧差法提取视频中不同的帧序列进行对比,这种方法的原理简单、计算量小,但受周围环境因素影响较大、对噪声敏感,鲁棒性不强。文献[3]提出光流法进行检测,这种方法对噪声的敏感较低,但计算量较大,实时性差。近年来,随着机器学习的发展,目前车辆检测系统一般分为外观特征提取和分类学习两部分,常用的外观特征有Harr特征[4]、形状特征[5]、颜色特征[6]以及方向梯度直方图(Histograms of Oriented Gradient,HOG)[7]等。常用的分类方法有人工神经网络(Neural Network,NN)[8]、聚类算法(如k-means算法)[9]以及集成算法(如Adaboost集成学习)[10]。
本文重点研究在于基于传统Harr特征,提出利用非负矩阵分解Harr特征进行降维(Harr-NMF)[11],提取训练样本的Harr-NMF特征得到基于车身特征的弱分类器,并由AdaBoost训练,加权将弱分类器构造为强分类器,级联得到24×24的汽车车身分类器。针对分类器所产生的错误检测进行噪声消除,对产生的重复检测进行重复性判定。实验表明,经过降维的Harr特征训练时间要明显比传统的Harr特征训练时间短。对分类器进行有效的重检、错检判别之后,达到了比较满意的检测率。
2 基于Harr-NMF特征的车辆检测基本原理
2.1 Harr特征
Harr特征是利用简单的矩阵组合来描述一幅图像的特征。在利用Harr特征进行图像描述时,主要可以用图1中四种特征模板,它们可以很好地描述一幅图像的基本属性,比如线性特征、边缘特征、对角线特征和中心特征等。这些特征模板在一幅图像中的大小是变化的,而Harr特征的特征值就是黑色矩形方块的像素值减去白色矩形方块的像素值。基于此,可以通过改变特征模板的种类、大小和在一幅图像中的位置来得到图像的Harr特征。

图1 Harr特征的四种模板
在进行计算时,Harr特征的数量极大,例如一幅24 ×24像素的灰度图像可以形成的特征向量的维数高达162 336维,并且在计算的过程中有大量的重复计算,高维的Harr特征值计算直接导致了训练时间的大量增加。为了解决这一个问题,本文提出利用非负矩阵分解(Non-negative Matrix Factorization,NMF)对高维特征向量进行降维。
2.2 Harr-NMF特征
NMF是一种在矩阵中所有元素均为非负数约束条件之下的矩阵分解方法。Harr-NMF特征计算如下所示:
(1)设H是长为L的Harr特征向量,将其取绝对值然后转化为m×n的矩阵C,其中L=m×n,m>n。
(2)对转化后得到的矩阵C进行秩为r的NMF分解:

其中W和H分别是m×r和n×r的非负的基矩阵和系数矩阵,r<<m;
(3)对W和H的每一个列向量vi作归一化处理,即:

(4)将所有的列向量级联成Harr-NMF特征。本文中,归一化之后的训练样本为24×24像素大小,L=162 336,m= 5 073,n=32,r=3,Harr-NMF特征的长度为15 315,NMF对图像的噪声有一定的稳定性,通过分解得到的基矩阵和系数矩阵对保留了原矩阵的主要特征,因此Harr-NMF特征在很好的保留了Harr特征特性的基础上,通过极大地减少Harr特征维数来减少后续算法的计算时间。
2.3 Adaboost算法
在得到训练样本的Harr-NMF特征后,通过利用Adaboost算法对大量的正负样本进行学习。Adaboost算法根据得到的Harr-NMF特征利用弱分类器将样本进行分类,在每次的迭代过程中选取分类错误率最小的弱分类器作为本次迭代的最优分类器,并为最优弱分类器赋以权重。并根据上一次的分类结果更新每个样本的权值,提高错误样本权重并降低正确训练样本权重。把经过多次迭代之后得到一系列弱分类器级联生成决策分类器。Adaboost算法训练分类器的方法如下:
设样本空间为X、迭代次数为T、样本类别为Y、训练样本数为N和训练样本集S:

示负样本,+1代表正样本。
初始时对每个输入的训练样本分配相同的权重,设初始权值为D1(xi)=1/N,则Dt(xi)表示第t轮中样本xi的权重,其中t=1,2,...,T。根据训练样本权重分布对样本特征进行学习,获得最优弱分类器hi(xi),的最小容许误差为εt,εt可由式(4)计算得到:

然后,利用容许误差计算本轮最佳弱分类器ht(xi)的权重αt:

根据本次迭代得到的最优弱分类器hi(xi)、权重αt和分类的结果,更新训练样本的权重,更新的样本分布为:

其中,Zt为归一化因子,使经过T轮循环后,获得T个最优弱分类器,将ht(xi)按照其权重级联起来得到强分类器H(x):
Adaboost算法流程如图2所示:
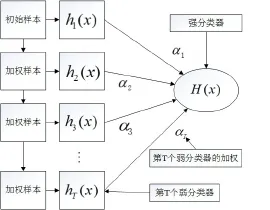
图2 Adaboost算法流程示意图
2.4 级联分类器
级联分类器是将算法训练得到的一系列弱分类器级联起来得到识别准确率很高的强分类器。弱分类器排列时,相对简单的分类器排在前面,这样在检测的开始阶段大量的负样本会被排除,从而缩短检测时间。
从图3级联分类器的构成可以看出,通过训练得到的强分类器是一颗退化的决策树。在进行车辆检测时,检测窗口必须全部通过弱分类器才能被判定为正样本,每个分类器几乎可以让所有的正样本通过,而一旦某个窗口被某个弱分类器判定为负样本就会终止判断过程,并进入到下一个检测流程中。因此最后一个分类器留下来的目标就是检测目标。

图3 级联分类器构造示意图
3 基于Harr-NMF特征的车辆检测实验
3.1 图像预处理
训练样本和测试样本来自于武汉市道路交通,通过百度地图全景模式功能截取240×240大小的图像,充分考虑到了各种路况下正样本和负样本的比例,得到训练样本集和测试样本集。其中车辆分布在正样本图像正中,负样本是不包含车辆的道路背景图,比如车道线、红绿灯和交通指示牌等。
为了缩短训练时间,将所有正样本归一化大小到24×24大小,并进行图像灰度化。图4为部分正负样本,图5为部分灰度化后的正负样本。

图4 部分正负样本示例

图5 部分灰度化正负样本示例
3.2 车辆初步检测
本文测试平台为Visual Studio 2013,测试计算机配置为Inter(R)Core(TM)i3-2100,主频为3.10GHz,内存为8GB。利用训练出来的车身分类器进行实测。算法的整体流程图如图6所示。

图6 算法的整体流程
分别对提取的Harr特征与Harr-NMF特征进行分类训练,计算训练时间,对分类器进行实测。在两种特征所形成分类器的车辆检测率相当的情况下,通过本文选取的正负样本提取出Harr特征的训练时间要远远大于Harr-NMF特征的训练时间。对比测试结果见表1。

表1 两种特征训练时间与检测率对比
图7是基于两种特征的部分检测情况。图7(1)是基于Harr特征分类器的初步检测结果,图7(2)是基于Harr-NMF特征分类器的初步检测结果。除了前方远距离被遮挡车辆有少量漏检的情况外,参考在实际行驶中这部分漏检车对我们作用不大,可以忽略。因此认为,基于传统Harr特征的车身分类器和基于Harr-NMF特征的车身分类器在检测效果相当的情况下,后者分类器的训练速度更快。

图7 两种特征检测结果对比图
在Harr-NMF特征计算中,降维参数r的取值对检测结果有很大的影响,r值越大,Harr信息保留得越完整,但是特征维数越大,训练时间越长;r值越小,Harr特征压缩越剧烈,图像丢失的信息越严重。本文中Harr特征的原始维数为L=162 336,m=5 073,n=32,r值分别取1,2,3,4。
经过测试,Harr-NMF对应的特征维数、检测率以及训练时间见表2。从表2中可以看出,在r=2或r=3时,在特征维数、分类器的检测性能和训练时间中取得了较好的平衡,本文取r=3。

表2 不同r值的特征维数和性能比较
但是实测中也存在着一辆车被重复检测和一些错误检测的问题等。针对这些问题,本文对初步检测结果进行了进一步改进。
4 优化与分析
4.1 重复识别的处理
在车辆初步检测过程中,发现同一辆车被检测到两次的问题。针对这一问题,本文通过式(8)判定二者是否重合:

其中,r1,r2分别为圆O1,圆O2的半径,(x1,y1),(x2,y2)为圆心坐标,max(r1,r2)为重合度阈值,当两者关系满足上述条件时,判断检测目标为相同目标。图8(1)为初步测试结果,图中左侧车辆被分类器重复检测了两次,对该被测车辆进行重复性判定之后,测试优化结果如图8(2)所示。对比两次测试结果,发现采用重复性判定后重复检测问题得到明显改善。

图8 重复识别测试结果对比图
4.2 错误识别的处理
测试时发现有时会出现误检的情况,误检区域一般为道路上的一些建筑。但是一般情况下车身像素与车身周围道路像素差别较大。为了消除误检区域,首先计算圆形区域均值像素P1,然后扩大圆形区域,计算扩大之后圆形区域的均值像素P2,比较两次均值像素的差值P,给定均值像素阈值。经过多次测试,给定扩大圆形区域为1.1倍,给定均值像素的差值P=10。即扩大后的两次圆形区域的均值像素值差小于10时,判断检测目标为误检目标。图9(1)为初步测试结果,中间黑色车辆的前方有一个误检目标。根据均值像素差值消除该错检的结果如图9(2)所示。对比两次测试结果,误检目标得到消除。

图9 错误识别测试结果对比图
5 结论
本文在基于传统Harr特征检测的基础上,提出利用非负矩阵分解法对高维特征向量进行降维,在满足检测性能的基础上,极大地缩短了样本的训练周期。将提取的Harr-NMF特征进行分类并由Adaboost训练,级联得到基于Harr-NMF特征的车身级联分类器。该分类器与基于Harr特征分类器的检测率差别很小,但是训练时间大大缩短。针对在实车测试时出现的重检、错检等情况,提出重合度阈值判定重复检测和均值像素阈值判断错检。实验表明,该方法具有较高的检测准确率,可以作为车辆检测的一种方法作进一步的研究。在接下来的研究过程中,应着重研究在夜晚、阴雨天气、车辆发生遮挡等情况时的检测方法以及加快算法移植到硬件平台上。
[1]韩艺.基于视频图像的运动车辆检测与跟踪算法研究[D].哈尔滨:哈尔滨工业大学,2015.
[2]Wixson L.Detecting salient motion by accumulating directionally-consistent flow[A].The Proceedings of the Seventh IEEE International Conference on Computer Vision,IEEE[C].1999.
[3]Moscheni F,Bhattacharjee S,Kunt M.Spatio-temporal segmentation based on region merging[J].IEEE Transactions on Pattern Analysis&Machine Intelligence,1998,20(9):897-915.
[4]Viola Paul,Jones Michael J.Robust Real-time Object Detection[R].Cambridge Research Laboratory,2001.
[5]Wu B,Nevatia R.Simultaneous Object Detection and Segmentation by Boosting Local Shape Feature based Classifier[A].2007IEEE Conference on Computer Vision and Pattern Recognition[C].2007.
[6]曾波波,王贵锦,林行刚.基于颜色自相似度特征的实时行人检测[J].清华大学学报(自然科学版),2012,50(4):571-574.
[7]Dalal N,Triggs B.Histograms of oriented gradients for human detection[A].Proceedings of the IEEE International Conference on Computer Vision and Pattern Recognition[C].San Diego,USA,2005.
[8]Zhao L,Thorpe C E.Stereo and neural network-based pedestrian detection[J].IEEE Transactions on Intelligent Transportation Systems,2000,1(3):148-154.
[9]王千,王成,冯振元,等.K-means聚类算法研究综述[J].电子设计工程,2012,20(7):21-24.
[10]Freund Y,Schapire R E.A decision theoretic generalization of on-line learning and an application to boosting[A].European Conference on ComputationalLearning Theory[C]. Springer-Verlag,1995.
[11]Jones M J,Viola P.Method and system for object detection in digital images:US,US7099510[P].2006.
Study on Vehicle Inspection Algorithm Based on Harr-NMF Feature
Hu Jie,Liu Zhicheng,Yang Huiping,Li Zexi
(School of Automobile Engineering,Wuhan University of Technology,Wuhan 430070,China)
In this paper,in order to improve the accuracy and efficiency in vehicle inspection to provide reliable reference information for the intelligent traffic system,and in light of the problems of the traditional vehicle inspection algorithm based on the Harr feature,we proposed to decompose the Harr feature by a non-negative matrix to yield a lower-dimension Harr-NMF feature.Next we categorized the Harr-NMF feature and obtained through Adaboost training the Harr-NMF based vehicle classifier for the effective identification of the vehicle body.At the end,in view of the problems encountered in an empirical practice of the method,we further optimized the algorithm.
intelligent traffic;vehicle inspection;Harr-NMF feature;Adaboost algorithm
F224;F407.472
A
1005-152X(2017)08-0117-05
2017-07-05
国家重点研发计划项目“满足国IV标准的摩托车排放控制后处理系统技术研究”(2016YFC0204905)
胡杰(1984-),男,湖北武汉人,博士,副教授,主要研究方向:智能网联汽车与内燃机;刘志成(1993-),通讯作者,男,湖北荆州人,硕士研究生,主要研究方向:智能网联汽车。
doi∶10.3969/j.issn.1005-152X.2017.08.027