基于GPS/BDS技术的软件测长仪*
2017-09-03王荣理陈志平施浒立李春光李佳威
王荣理,陈志平,施浒立,李春光,李佳威
(1. 杭州电子科技大学, 浙江 杭州 310018; 2. 中国科学院国家天文台, 北京 100012)
基于GPS/BDS技术的软件测长仪*
王荣理1,2,陈志平1,施浒立2,李春光1,李佳威2
(1. 杭州电子科技大学, 浙江 杭州 310018; 2. 中国科学院国家天文台, 北京 100012)
随着计算机技术特别是微电子技术的快速发展与普遍应用,许多传统的机械和电子设备与软件技术相结合,促进了传统机电设备的新发展与新应用。文中论述了测长装置的发展历程,着重阐述了基于GPS/BDS(全球定位系统/中国北斗卫星导航系统)技术的智能软件测长仪的测量原理、设计理念和测量流程,提出利用伪距和载波相位相结合求整周模糊度的方法。通过实验验证了软件测长仪具有非接触式测量、直接测距和毫米级测量精度的特点,可开发成智能化、自动化、小型化、模块化和开放式系统设备,其市场应用前景广阔。
测长装置;机械;电子;智能软件;GPS/BDS
引 言
测量长度和位移是人类从事生产活动和生活的需要,人类最早测量长度起源于埃及尼罗河泛滥后重新丈量土地。随着生产力的提升和科技的发展,人类对长度的度量和位置的测量要求不断提高,不但对测量范围的要求不断扩大,而且对测量精度的要求与日俱增。测量手段和仪器也不断发生变革,从机械式测量发展到用光学仪器和无线电设备进行测量。特别是有了卫星导航系统以后,位置和长度测量方式发生了巨大变化,在整个地球上不但能广泛方便地运用卫星导航系统实现普适的长度和位置测量,而且利用卫星上播发的载波信号,还实现了高精度测量[1]。由于这类测量的实际应用面极广,所以很快就会形成一类产业,称为精准测量产业,其中测量长度和位置坐标是这类产业中最重要的测量内容之一。
本文阐述了基于GPS/BDS(全球定位系统/中国北斗卫星导航系统)技术的软件测长仪的测量原理、设计理念和测量流程。针对载波相位测量中求整周模糊度的难题,提出一种利用伪距和载波相位相结合求整周模糊度的方法。通过测试验证了软件测长仪精度可以达到毫米量级,并且信号环境适应性较强。
1 机械测长装置的发展
最早在机械制造中使用的是一些机械式测量工具,用来测量小尺寸工件,如图1的角尺和卡钳。至16世纪,在火炮制造中开始使用光滑量规,1772年和
1805年,英国的J·瓦特和H·莫兹利等先后制造出利用螺纹副原理测量长度的瓦特千分尺和校准用测长机。19世纪中叶以后,先后发明出类似于现代机械式外径千分尺(图1(c))和游标卡尺的测量工具。19世纪末期,出现了成套量块(图1(d))[2]。之后光学测量工具得到快速发展,到20世纪20年代,机械制造中用到了投影仪、工具显微镜和光学测微仪等。1928年诞生了气动量仪,一种适合在大批量生产中使用的测量工具[3]。

图1 几种常见的机械测长工具
对于尺寸在1~100 m的测量,可以用皮尺、钢尺,以及因瓦基线尺。测量范围更大的机械测长装置有测距轮等。总的来说,机械测长装置具有成本低、装置简单、操作简便、测量结果直观的特点,但是机械测长装置存在局限性,它必须与被测物体接触,测量效率偏低,测量精度受操作者的主观影响较大。
2 电子测长装置的发展
随着电子技术的发展,产生了越来越多的电子测长装置。电学测量工具诞生于20世纪30年代,最初出现的是利用电感式长度传感器制成的界限量规和轮廓仪。50年代后期产生了以数字显示测量结果的测长机(图2(a)),60年代中期,在机械制造中已应用带有电子计算机辅助测量的坐标测量机(图2(b))。至70年代初,又出现了计算机数字控制的齿轮量仪,至此,测量工具进入应用电子计算机的阶段[4-5]。这些设备是针对机械加工中对精密零件的测长要求而设计研制的,所测长度范围一般都不大。

图2 常见的电子测长设备
大尺寸测量的电子测距设备也有很多种类,如激光测距仪、超声波测距仪、红外线测距仪等,它们是基于光、电技术的高技术测长装置。本文引入脉冲式激光测距仪,进行对比分析。激光测距仪(图3)的测量范围大约为12~1 200 m,测量精度可达毫米级,广泛应用于军事、生产建设和科学研究。由于激光的准直性好,单色性好,功率密度高,与普通光源具有显著区别,在距离测量方面有很大的优势。

图3 激光测距仪
脉冲激光测距是利用激光脉冲持续时间极短、能量在时间上相对集中、瞬时功率很大(可达兆瓦)的特点,开发出的一套精度较高的长距离测长装置。在有合作目标的情况下,脉冲激光可以达到极远的测程,在进行几公里的近程测距时,即使不使用合作目标,利用被测目标对脉冲激光漫反射的反射信号,也可以进行测距。其工作原理是:由仪器对外发射一束激光信号,激光信号接触到目标后发生漫反射,仪器接收到反射信号,根据发射信号到接收回波信号之间的时间差,计算出测距仪到被测物体之间的距离[6]。
设目标的距离为L,光信号往返所走过的距离即为2L,则:
L=ct/2
(1)
式中:t表示光信号往返时间;c为光速。
脉冲式激光测距仪一般由激光发射、激光接收、数据收集、数据处理、显示5部分组成,如图4所示。
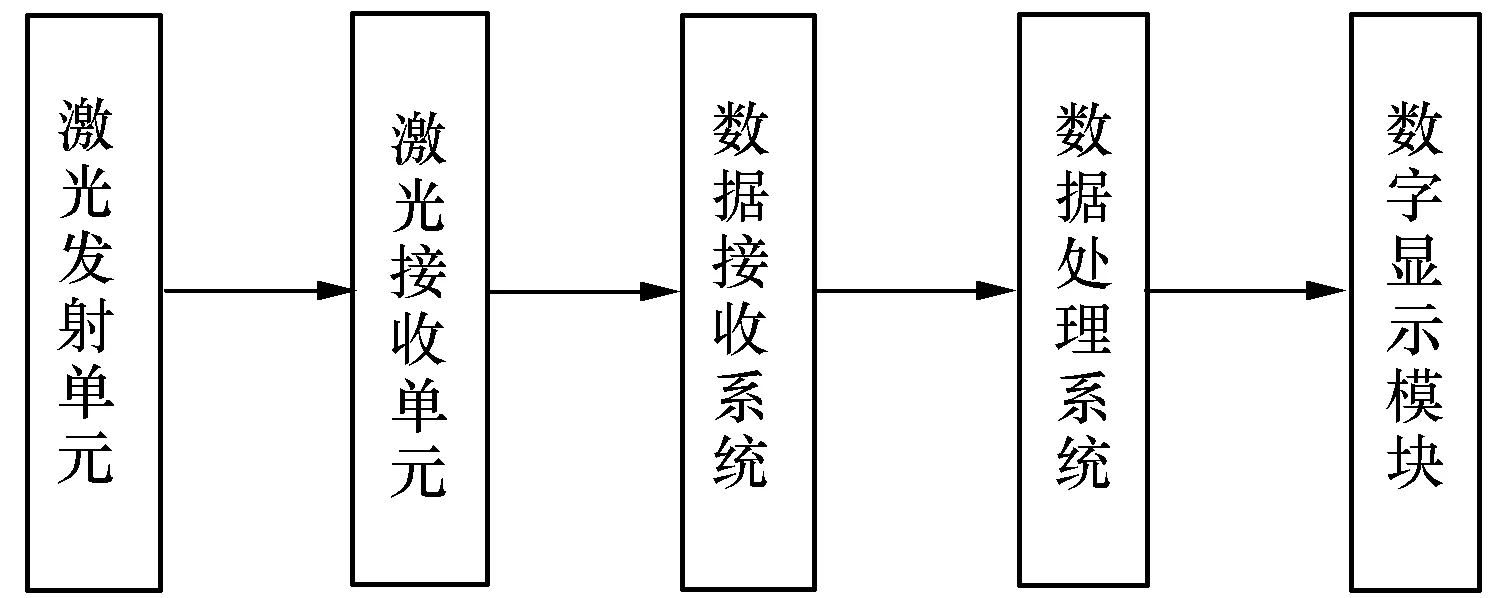
图4 激光测距仪系统结构框图
从激光测距仪的测量原理可以看出,影响测量精度的主要因素是对光信号从发出到接收之间时间的计算精度[7]。若激光脉冲在测距仪和目标之间的往返时间为t,t即为接收机收到激光脉冲的时刻Tm与发射激光脉冲的时刻Tn之差。传输时间t用脉冲计数获得,计数器输出脉冲数为N,时钟信号周期为T,则测得的延迟时间就为N×T。在测量过程中,除了脉冲信号整周期脉冲数以外,还有不到整周期的时间Te,得:
t=Tm-Tn=NT+Te
(2)
所以提高系统时钟频率就可以提高脉冲式测距仪的测距精度。但是高频会带来电路设计、印制板制作的难度和成本的提高,这也是激光测距仪的局限性所在。
综上所述,电子测长装置与传统的机械测长装置相比,集成化程度更高,能更加直观方便地获得测量结果,甚至可以进行非接触式测量。但是机械和电子测长装置均无法实现对有遮挡物的长度进行测量,因此,软件测长仪应运而生。
3 软件测长仪
随着计算机技术的蓬勃发展和嵌入式微电子器件的广泛应用,软件技术也应用到了长度测量领域。软件测长仪是通过算法及软件进行测长的装置,软件测长仪的主要技术之一是利用GPS/BDS进行测距,直接测量被测两点的位置坐标,通过坐标计算获得两点之间的距离。为了提高测距的精度,在GPS/BDS测长仪中采用了载波相位相干测量方法,其测距精度通常可以达到波长的百分之一到五百分之一,所以测长精度可以达到厘米,甚至毫米量级。
3.1 软件测长原理
软件测长仪或位置测量仪实际上是一个小的测量系统,采用射电干涉仪方案,即把2个接收天线的相位中心之间的距离作为测量基线,当作长度测量量。当2个天线接收到射频信号后,经低噪声放大、变频及滤波等处理,在接收机内进行相干测量,把相干的载波相位差数据经过专用算法运算,便可反演出基线长度。
如图5所示,假设在时刻t测出载波离开卫星发射天线时的起始相位和接收机天线接收到载波时的终止相位,就可以求出相位差[8]。

图5 载波相位测量示意图
若用相位差表示伪距,则:
ρ=λ(φs-φk)
(3)
式中:ρ为卫星s至接收机k的伪距;λ为载波波长;φs为t时刻卫星s处载波信号相位;φk为t时刻接收机k处载波信号相位。式中的φs无法直接得到,要实现载波相位测量,首先要重建载波,需要在接收机中产生一个频率和初相与卫星处载波信号完全相同的基准信号[9],如图6所示。
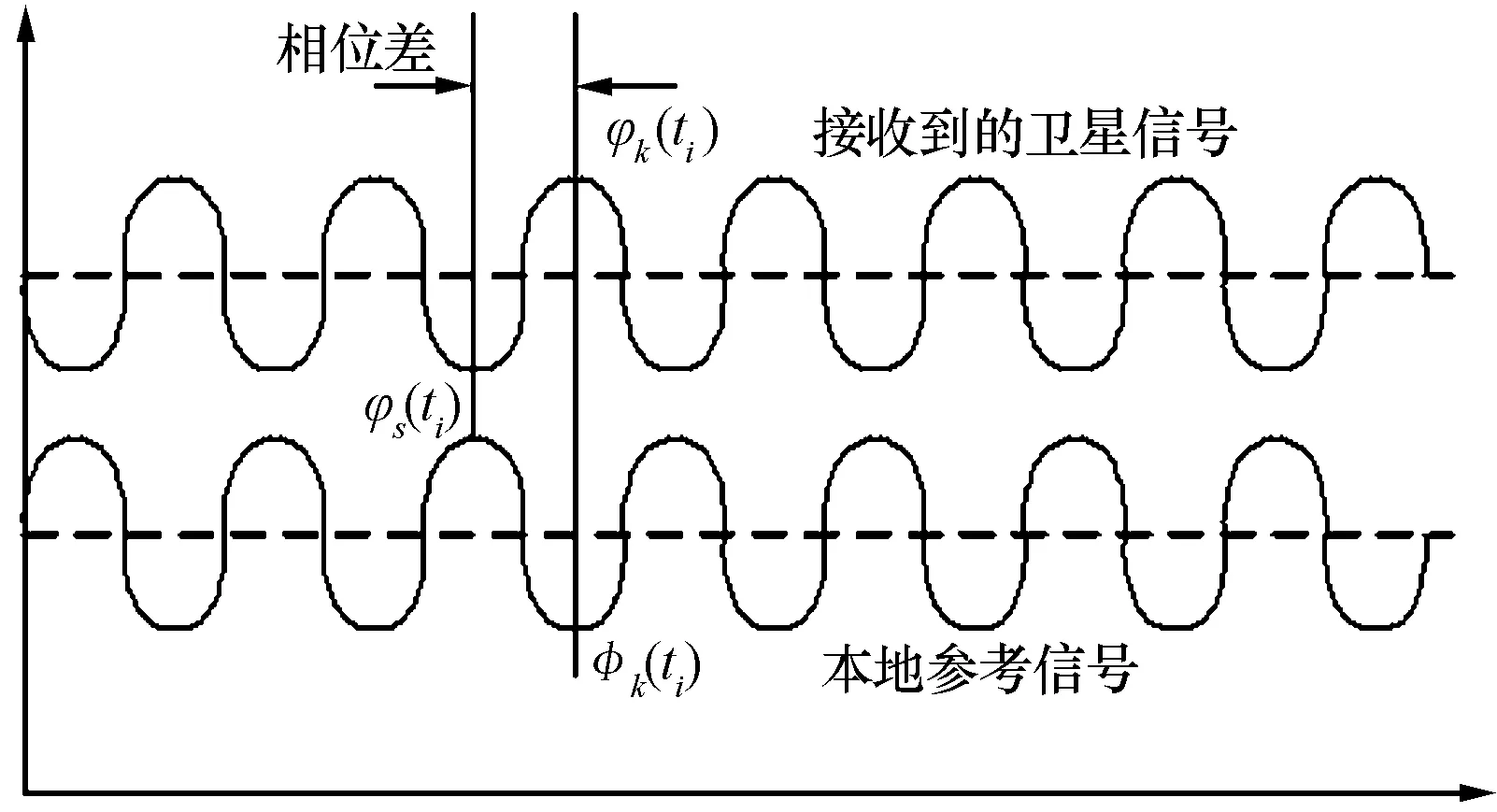
图6 载波相位测量原理
在任一时刻ti,本地参考信号的相位φk(ti)与卫星处信号的相位φs(ti)相等,同一时刻接收机截获到的相位为φk(ti),由此能够得到:
Δφ=φs(ti)-φk(ti)=φk(ti)-φk(ti)
(4)
式中,Δφ表示载波相位一周内的相位差。那么,卫星到接收机的距离为:
ρ=λ(N0+Δφ)=λN0+λ[φs(ti)-φk(ti)]
(5)
式中,N0表示载波相位的整周部分。
根据以上公式,求卫星到接收机的距离关键在于求出载波相位的整周数。即使接收机能相当精确地测量载波相位(市面上的载波相位接收机分辨率为0.01周载波),精确度量由卫星发射信号开始至接收机收到信号为止载波所历经的周数是比较困难的。因为在进行载波相位的实际观测时必不可少地会含有未知的一周相位周数,这称为载波整周多值性,也可以称作整周模糊度。
3.2 整周模糊度求解
动态模糊度的求解一般包括双频P码伪距/载波相位结合法、相位模糊度函数法、最小二乘搜索法和LAMBDA法等相关方法。下面以双频P码伪距/载波相位结合法为例进行说明。
双频P码伪距/载波相位组合就是通过伪距和载波相位观测方程组合的方式,先求出二者组合后的模糊度值,再分别求取两个频率的模糊度值,下面是其解算过程。
先将GPS/BDS两个频段L1、L2的载波相位观测值和双频P码的伪距观测值设为Φ1、Φ2和ρ1、ρ2,可建立如下的伪距观测方程:
(6)
(7)

而载波相位的观测量φ1、φ2可以表示为
(8)
(9)
式中,N1、N2为L1、L2的整周模糊度。
通过推导可得:
(10)
式中,φ1-φ2、N1-N2表示宽巷观测值及其模糊度,那么式(10)可以另外表述为
(11)
同理可得:
(12)
窄巷观测值:
(13)
继续推导可得:
(14)
(15)
根据式(14)、式(15)、伪距观测量和载波相位观测量,可以求出整周模糊度N1,-1和N1,1。如果观测历元较多,就能得到多组整周模糊度,取其平均值作为准确的模糊度值即可。L1、L2的整周模糊度用下式求得:
(16)
N1,-1和N1,1已由式(14)和式(15)求得,因此只需将其带入式(16)即可得到L1、L2的载波相位整周模糊度[10-12]。
4 软件测长仪的工作流程和应用范围
4.1 软件测长仪的组成和工作流程
软件测长装置的组成一般包括卫星、几个接收单元天线、能完成相干测量的接收机或模块、信号传输单元或传输线、PC机或服务平台等。
软件测长仪用一对天线接收卫星载波信号,再通过变频模块把L波段导航卫星信号变频至中频,两路中频信号同时进入基带模块进行相关,求解出所收到信号之间的路径差。基带信号输出至DSP,由DSP完成测长计算。根据上述设计理念,GPS/BDS软件测长仪的工作流程如图7所示。

图7 GPS/BDS长度测量流程图
4.2 软件测长仪测试
根据载波相位测量原理编译长度测量程序,采用中科微电子公司的GPS用户接收机,GPS/BDS双模接收模块如图8所示。在中科院天地科学园区对GPS/BDS测长仪进行基线长度测量的测试,测试长度测量误差,并对比接收不同数量卫星信号对于测量结果的影响。如图9所示,测试环境较好,卫星可见性好且无信号遮挡现象。
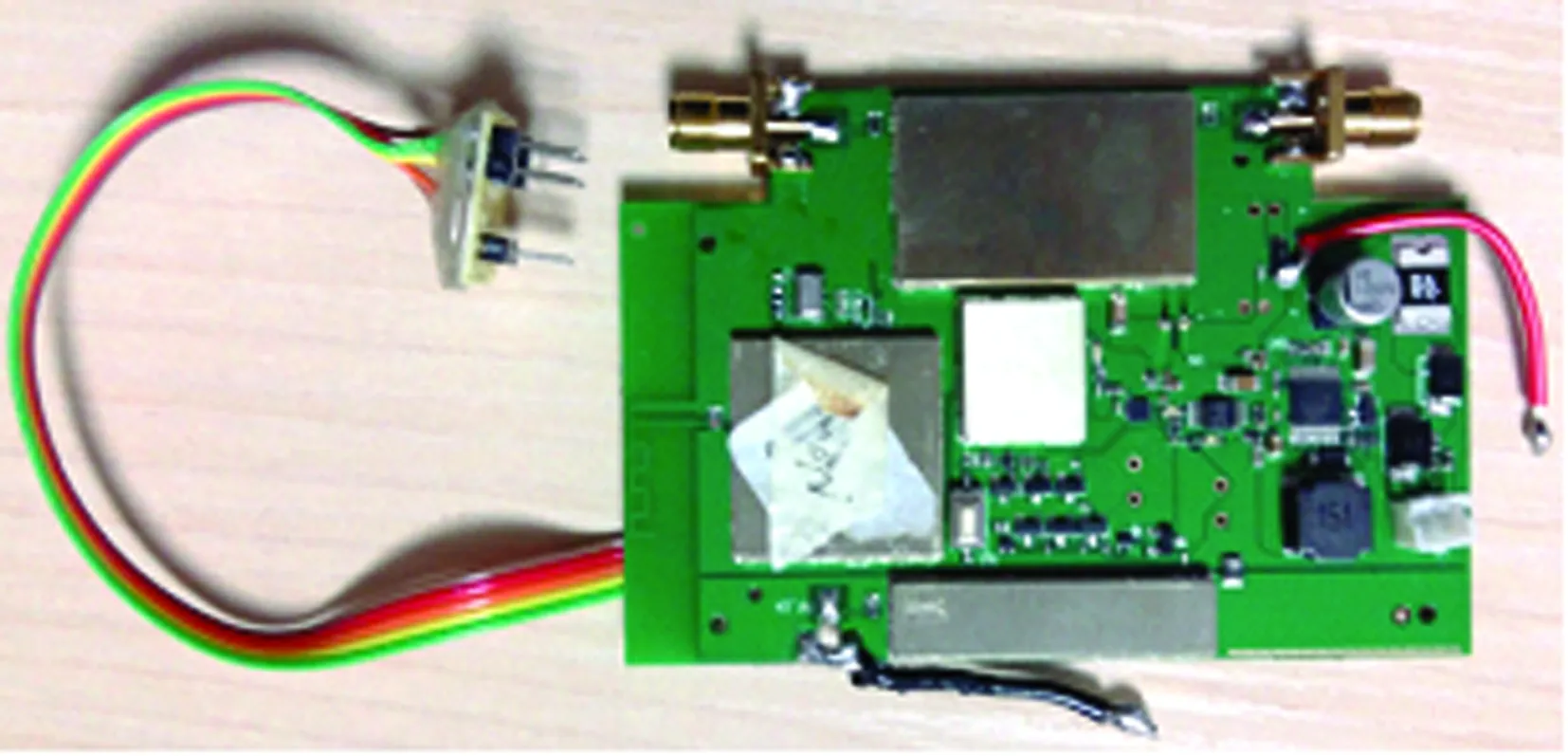
图8 GPS/BDS测长仪接收模块

图9 GPS/BDS载波相位测长实验
实验中搭载2根GPS有源天线,调整间距使其基线长度为0.25 m,固定两个接收天线,用射频线将天线与GPS/BDS双模接收模块连接,通过软件对卫星数据进行相干计算,获取基线长度数据。表1列出了接收不同数量卫星信号时计算出的天线基线长度。
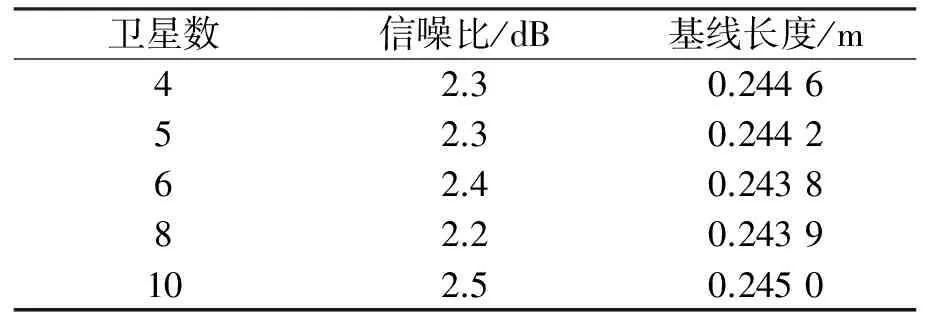
表1 GPS/BDS基线长度测量数据
GPS/BDS测长仪测试结果显示,长度测量误差保持在毫米量级。并且接收不同数量卫星信号时计算出的天线基线长度差别不大,对测试结果影响较小,说明GPS/BDS测长仪的信号环境适应性较强。
测长仪可以用于建筑物、地质滑坡体、桥梁、高速公路、大坝等的形变和坐标位置监测。
5 结束语
随着电子技术及计算机技术的发展,测长仪由最初简单的机械测长设备,发展到机电一体化的电子测长设备,再到软件技术迅速发展起来之后的软件测长设备。本文基于GPS/BDS技术的软件测长仪,根据载波相位干涉测量原理,利用伪距和载波相位相结合的方法求整周模糊度,可以直接计算出两点之间的距离,其测量精度可以达到毫米级。与机械和电子测长装置相比,软件测长仪可以实现非接触式测量,同时也解决了两点之间有遮挡物的长度测量难题,具有智能化、自动化、小型化、模块化和开放式系统的特点,有广阔的市场应用前景。
[1] 施浒立, 周津慧, 徐国华. 软件机械[J]. 电子机械工程, 2002, 18(5): 1-4, 15.
[2] 裘祖荣, 石照耀, 李岩. 机械制造领域测量技术的发展研究[J]. 机械工程学报, 2010, 46(14): 1-11.
[3] 赵曦, 贾曦, 黄荐渠. 现代长度测量方法综述[J]. 自动化仪表, 2007, 28(11): 12-15.
[4] 刘占东, 许爱芬, 王宾. 万能测长仪原理与结构研究[J]. 科技广场, 2012(7): 147-149.
[5] 高宇海. 测长仪和测长机内尺寸测量不确定度的分析比较[J]. 计量技术, 2013(3): 69-72.
[6] 王建波. 激光测距仪原理及应用[J]. 有色设备, 2002(6): 15-16.
[7] 段淋淋, 崔一平. 新型便携式激光测距仪的原理及方案设计[J]. 电子器件, 2009, 32(1): 195-199.
[8] 谢钢. GPS/BDS原理与接收机设计[M]. 北京: 电子工业出版社, 2012.
[9] 黄波. 渐进提高精度的载波相位测距技术[J]. 南京邮电大学学报: 自然科学版, 2015, 35(2): 34-39.
[10] GE M, GENDT G, ROTHACHER M, et al. Resolution of GPS carrier-phase ambiguities in precise point positioning (PPP) with daily observations[J]. Journal of Geodesy, 2008, 82(7): 389-399.
[11] WU Y, JIN S G, WANG Z M, et al. Cycle slip detection using multi-frequency GPS carrier phase observations: a simulation study[J]. Advances in Space Research, 2010, 46(2): 144-149.
[12] WANG J, WANG J L, ROBERTS C. Reducing GPS carrier phase errors with EMD-wavelet for precise static positioning[J]. Survey Review, 2009, 41(312): 152-161.
王荣理(1991-),男,硕士研究生,主要研究方向为电磁场仿真及精准测量。
Software Length Measuring Device Based on GPS/BDS
WANG Rong-li1,2,CHEN Zhi-ping1,SHI Hu-li2,LI Chun-guang1,LI Jia-wei2
(1.HangzhouDianziUniversity,Hangzhou310018,China;2.NationalAstronomicalObservatories,ChineseAcademyofSciences,Beijing100012,China)
With the rapid development and widespread application of computer technology, especially microelectronics technology, many traditional machinery and electronic equipment have new progress and new function by combining with software technology. This paper discusses the development progress of measuring device and expounds the measuring principle, design concept, measuring process of GPS/BDS intelligent software length measuring device, and proposes the method of calculating integer ambiguity by combining pseudo-range and carrier phase. It is verified by experiment that software length measuring device has the characteristics of non-contact measuring, direct range measuring and millimeter measure precision. It can be exploited for intelligent, automated, miniaturized, modularized and open system devices, so it has broad market and application prospect.
length measuring device; mechanics; electronics; intelligent software; GPS/BDS
2016-09-06
P228.4
A
1008-5300(2017)01-0060-05
