基于半潜船的TLP平台干拖运输研究
2017-09-03魏佳广黄山田李怀亮王火平李小龙
魏佳广,刘 浩,黄山田,李怀亮,王火平,李小龙
1.海洋石油工程股份有限公司,天津 300452
2.中海石油深海开发有限公司,广东深圳 518000
基于半潜船的TLP平台干拖运输研究
魏佳广1,刘 浩2,黄山田1,李怀亮2,王火平2,李小龙2
1.海洋石油工程股份有限公司,天津 300452
2.中海石油深海开发有限公司,广东深圳 518000
随着国内对海上油气进一步开发,迫切需要掌握TLP浮式平台的长距离运输技术。首先介绍了TLP平台海上干拖和湿拖的方法及优缺点,然后以流花油田某TLP平台为例,阐述了利用半潜船干拖TLP平台的运输技术。分析了TLP平台的浮装/浮卸、干拖作业能力、TLP平台的固定支架的预布置、环境条件限制等关键点,并用MOSES软件分析半潜船干拖运输TLP平台的稳性,为工程实践提供理论指导,对TLP平台拖运的真正实施有很大的参考意义。
TLP平台;干拖;浮装/浮卸;半潜船;稳性分析
张力腿平台(Tension Leg Platform,以下简写为TLP平台)作为国际上深水油气田开发的主要平台装备,在国外已经有近30年的发展历史,目前全球已有近30座TLP平台投入使用[1-2]。在国内,TLP平台的研发无论从海域水深、浮体重量、结构型式,还是运输技术、海上安装等方面,都有很大的技术、风险挑战。
本文以某深水半潜式自航工程船和流花某TLP平台FEED设计项目为例,对半潜式船舶干拖运输进行研究,对TLP平台的浮装/浮卸过程、干拖作业能力、TLP平台的固定、环境条件、干拖稳性等关键点进行了分析。
1 TLP平台运输方式
一般来说,TLP平台的海上运输分为干拖和湿拖。干拖,就是将浮式TLP平台装载在半潜船上运至深水后,半潜船下潜到一定的深度,使平台进入漂浮状态,这个运载过程即为干拖[3],湿拖则是由几条拖轮共同拖带TLP平台运输至目标油田。
由于TLP平台具有结构尺寸较大、吨位重、吃水深等特点,对长途运输而言,湿拖应急锚泊、避风难度大,拖航偏荡较为严重,且长距离的湿拖速度慢,工期长,风险高。而干拖吃水浅,航速快,防台避风能力强,安全性、可操作性较好。因此,现阶段干拖运输导管架及组块等大型海洋结构物在实际工程项目中的应用越来越广泛。
2 半潜船干拖TL P平台
本文以中国南海流花某油田为对象,研究半潜船干拖TLP平台运输技术。该油田位于中国南海珠江口盆地,油田水深约400 m,其浮式TLP平台的主要组成及参数见表1,模型见图1。
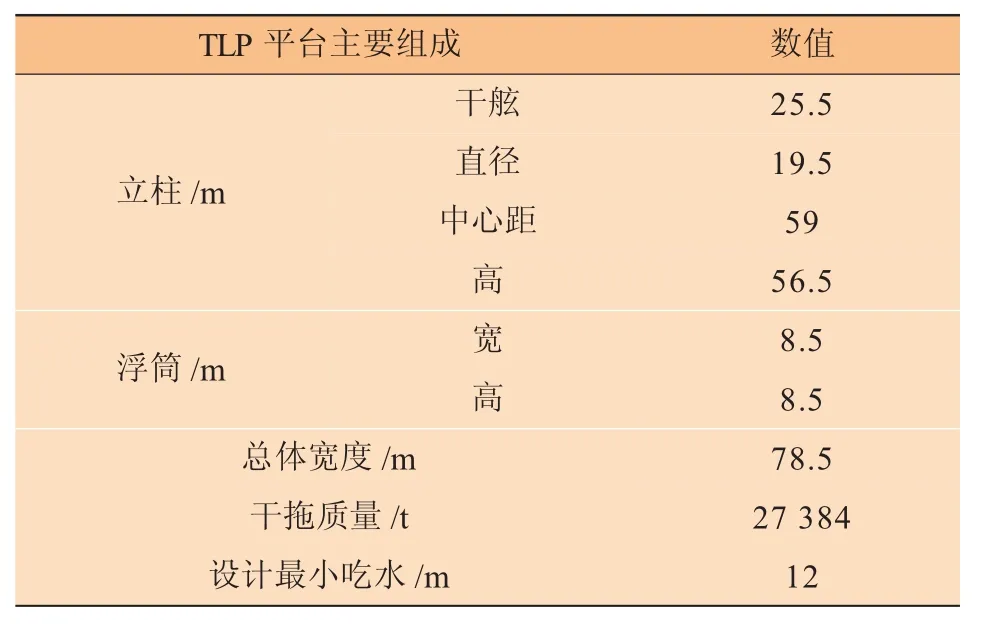
表1 TL P平台主要组成及基础参数

图1 TL P模型
半潜船主要参数及3D模型见表2、图2。
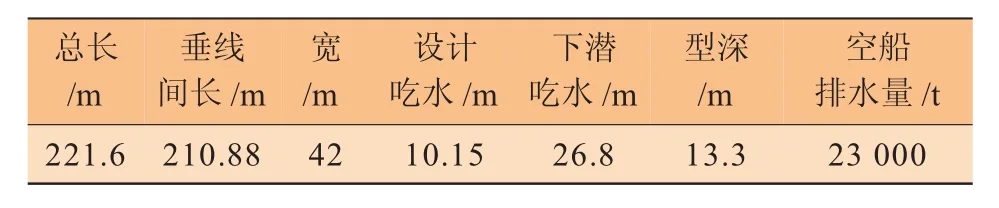
表2 半潜船主要参数
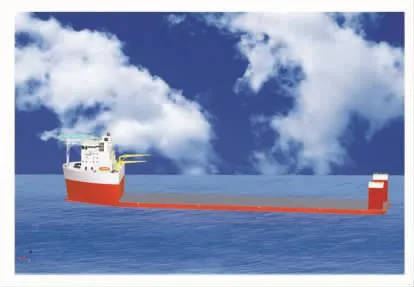
图2 半潜船3D模型
2.1 TLP平台浮装/浮卸
利用半潜船干拖运输TLP平台,TLP平台的浮装需要在水深适宜的锚地完成,作业难度和风险比较大。
TLP平台的装载方法有:从码头直接滑移装船至半潜船上;将TLP平台先装载在临时的驳船或浮船坞,再将TLP平台转移至半潜船上;整体吊装装船;分块吊装后集成;干船坞建造后浮装等。
根据流花某TLP平台的基础参数及青岛建造场地的条件,综合考虑将TLP平台湿拖至青岛港外锚地浮装于半潜船上,浮装地点的选择要考虑合适的水深和区域海床平整度,可以按照半潜船的最大下潜深度和富裕1 m的安全余量选择浮装位置[3-6]。
TLP平台浮装的操作步骤:
(1)利用4条拖轮(采用前2后2的方式)湿拖TLP平台于半潜船左舷侧[7],并将半潜船上设计预布置的8根缆绳逐一与TLP平台对应位置相连,此时完成TLP平台浮装首要条件。
(2)然后将半潜船压载下潜至一定深度,并保证与TLP平台设计吃水时底部存有较大的安全间隙,利用拖轮和连接缆绳控制TLP平台湿拖移位,并时刻监测TLP平台的水下位置,保证在半潜船设计位置正上方就位。
(3)最后根据监测检查确认各项装载程序均无异常,半潜船排载至拖航吃水状态,至此浮装过程完成。TLP平台浮装过程见图3。

图3 TL P平台浮装
当半潜船干拖TLP平台至目标油田附近后,对TLP平台进行浮卸操作,并转换为湿拖模式拖至安装位置。
2.2 半潜船浮装能力分析
从表2可知,半潜船最大下潜深度26.8 m,船型深13.3 m,考虑浮装过程半潜船甲板垫木高度为0.5 m,半潜船甲板面与TLP平台浮体底部间隙1 m,对其浮装/浮卸TLP平台的能力分析如下:
半潜船下潜最大深度时甲板面离水线面距离:26.8 m-13.3 m=13.5 m。
从表1可以看出,TLP平台设计最小吃水为12m,TLP平台浮装最小深度为:12m+0.5m+1m=13.5m。
当半潜船下潜至最大深度时,甲板面离水线面距离≥TLP平台浮装所需最小深度,即为满足浮装能力要求。由上述数据可知,该半潜船满足浮装能力要求。
半潜船干拖运输TLP平台整体布置示意见图4。
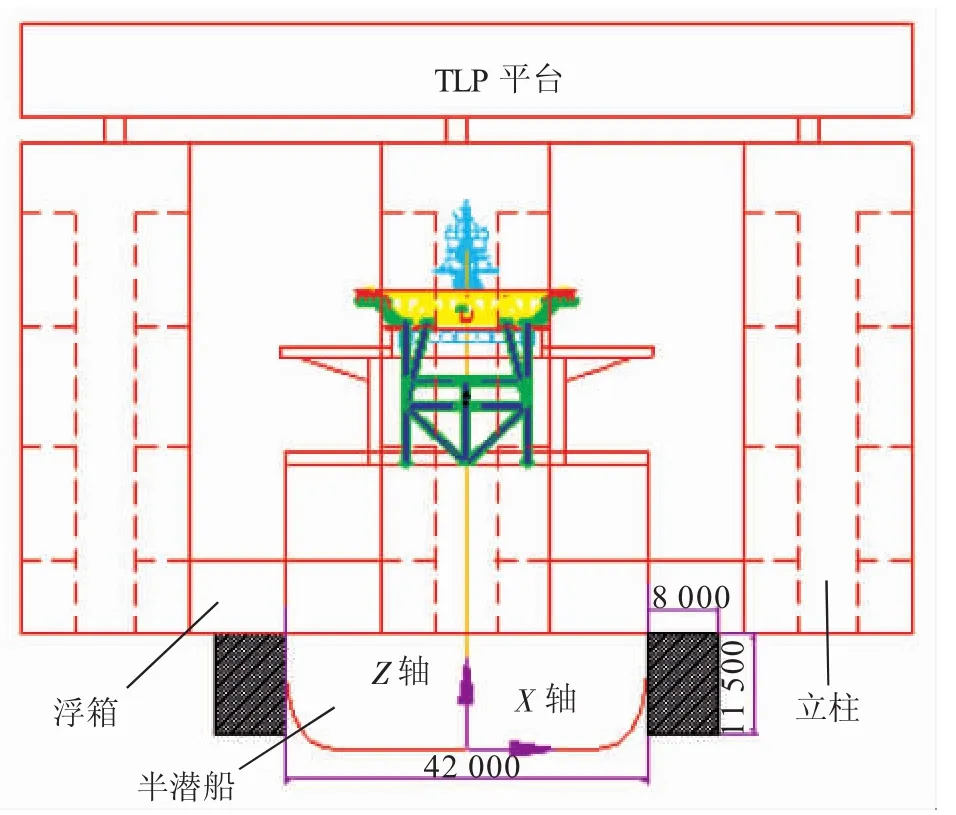
图4 半潜船运输TL P平台示意
2.3 TLP平台固定支架的预布置
由于TLP平台的浮装是在锚地完成,且TLP平台结构本体不能进行焊接[9],因此需要进行TLP平台的装载固定及布置。根据半潜船需要下潜一定深度浮装TLP平台的特点,设计垛式支架固定,并提前预布置[10]。
垛式支架由导向柱、缓冲机构和固定支架组成,分布在浮体的内部四周和外部两侧,便于引导控制TLP平台浮装的横向、纵向位置,从而保证了TLP平台在半潜船的精就位。待半潜船调载使甲板面露出水线面至设计吃水后,进行TLP平台垂直方向的打标固定,并将导向柱及缓冲机构拆除。对TLP平台的预固定安排如图5所示。
2.4 浮装/浮卸的环境条件
在半潜船和TLP平台浮装或分离过程中,良好的天气窗口更有利于施工操作[11-12]。除了参考半潜船自身考虑的限制条件外,浮装/浮卸环境条件可参考表3。

图 5 TL P平台固定布置

表3 TL P浮装/浮卸环境条件(10年一遇)
3 稳性分析
稳性分析是半潜船运输TLP平台的重要技术指标之一,关系到作业安全。根据稳性要求,需要对完整稳性和破舱稳性进行分析,完整稳性采用70 kn风速,破舱稳性采用50 kn风速。一般来说,船体纵向稳性比横向稳性好,故只对横向稳性进行分析。利用MOSES软件对半潜船干拖运输TLP平台稳性进行分析[13]。其3D模型如图6所示,完整稳性曲线(船舶稳性力臂曲线、风倾力臂曲线)如图7所示。
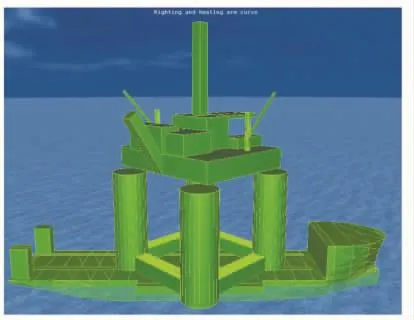
图6 干拖运输MOSES模型
从图7可以看出,半潜船干拖运输TLP平台的面积比在横摇角度64.18°时达到最大值,表明半潜船的正稳性范围最大值为64.18°;而回复力臂曲线在横摇角度24°时第一次达到波峰。
完整稳性计算结果见表4。
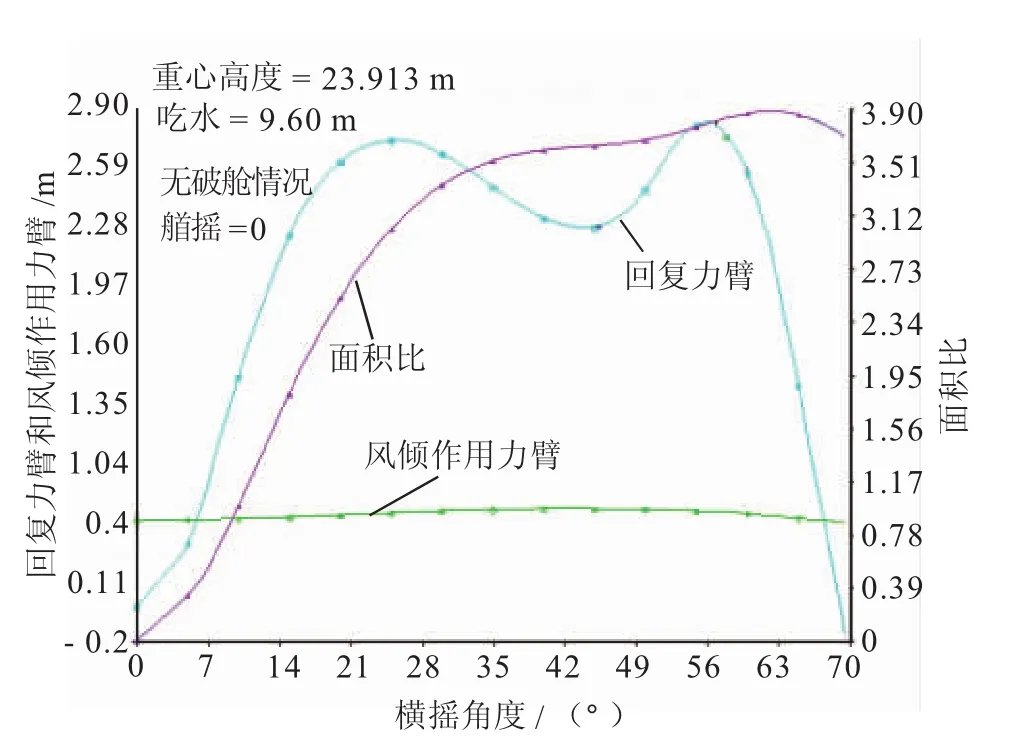
图7 完整稳性曲线
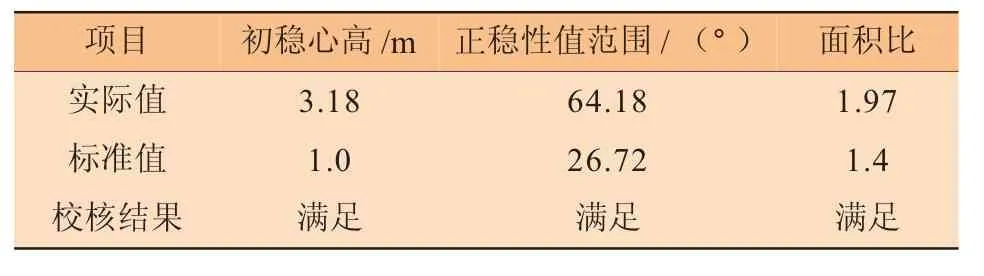
表4 完整稳性计算结果
从表4可以看出,半潜船干拖运输TLP平台的初稳心高、正稳性值、面积比都满足要求。
不同海况条件的横倾角与平台中心横向加速度见表5。
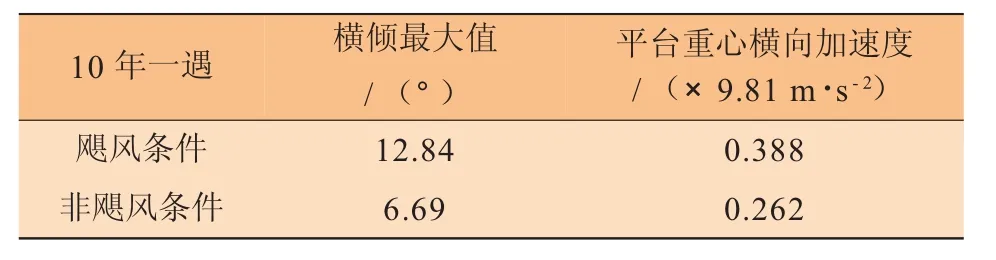
表5 不同海况条件的横倾数值(10年一遇)
最小的静态稳性范围需要满足下式[14-15]:

式中:θmax为设计风载引起的静态倾角(5.26°)与波浪引起的最大动态横倾角之和,最大倾角值见表5。
由于本项目的θmax=5.26°+12.84°,则20+ 0.8 θmax=34.48°,因此最小的静态稳性范围满足34.48°≤θ≤64.18°要求。
4 结束语
通过对TLP平台长距离运输过程的关键技术分析,可以看到干拖方式有很好的发展前景,尤其南中国海海域环境条件恶劣,利用半潜船下潜一定深度浮拖装船运输TLP平台,不仅为大型浮式平台提供了一种新型的装船运输作业方式,而且具有长途运输的优势,安全高效。
[1]段梦兰,陈永福,李林斌,等.海洋平台结构的最新研究进展[J].海洋工程,2000,18(1):86-90.
[2]张智,董艳秋,唐友刚,等.1990年后世界TLP平台的发展状况[J].中国海洋平台,2004,19(2):35-39.
[3]马成良,罗芊导.特大超宽件干拖运输关键技术研究与应用[J].中国水运,2016,7(7):31-33.
[4]刘锦昆.深水油气田开发海工平台设施及其应用[J].中国造船,2009,50(11):58-64.
[5]冯加果,王世圣,李新仲,等.张力腿平台湿拖完整稳性及破舱稳性研究[J].中国海洋平台,2011,26(3):40-46.
[6]冯加果,刘小燕,谢文会,等.张力腿平台就位安装压载方案研究及稳性分析[J].中国海洋平台,2016,31(3):45-50.
[7]冯加果,李新仲,刘小燕,等.张力腿平台湿拖稳性校核及方案调整分析[J].石油矿场机械,2011,11(11):11-15.
[8]张玉喜,徐海军,邢永恒.半潜船潜装平台影响因素研究[J].中国水运,2016,5(5):16-17.
[9]典型深水平台概念设计研究课题组.张力腿平台水动力响应分析[J].中国造船,2005,46(Z1):59-64.
[10]于文太,魏佳广,朱绍华,等.基于海洋石油201 DP模式的东方1-1导管架安装技术[J].海洋技术学报,2016,4(8):108-113.
[11]谢彬,张爱霞,段梦兰.中国南海深水油气田开发工程模式与平台选型[J].石油学报,2007,28(1):115-118.
[12]API RP 2T-1997,Recommended practice for planing,designing,and constructing tension leg platforms[S].
[13]张泉,田佰军.半潜船空载半潜作业时初稳性研究 [J].中国水运,2015,9(9):38-40.
[14]喻西崇,谢彬,金晓剑,等.国外深水气田开发工程模式探讨[J].中国海洋平台,2009,3(6):52-56.
[15]李新仲,王桂林,段梦兰,等.深水油气田开发中的浮式平台新技术[J].中国海洋平台,2010,4(8):36-41.
Research on dry-tow transportation of TL P Platform based on semi-submersible heavylift vessel
WEIJiaguang1,LIU Hao2,HUANG Shantian1,LIHuailiang1,WANG Huoping2,LIXiaolong2
1.Offshore OilEngineering Co.,Ltd.,Tianjin 300452,China
2.CNOOC Deep water Development Co.,Ltd.,Shenzhen 518000,China
With the domestic development of offshore oil and gas,it is a pressing need to master long distance transportation technology of TLP.This paper introduces the methods of marine dry-tow and wet-tow of TLP and their merits and demerits,than describes the TLP dry-tow transportation technology by using a semi-submersible vessel with the example of a certain TLP in Liuhua Oilfield.It analyzes the key techniques such as TLP floating-on/floating-off,dry-tow operational ability,presetting fixed supports of TLP and limitation of environmental conditions,also analyzes the TLP transportation stability with the software MOSES.This research provides the reference for realpractice of TLP tow transportation.
TLP platform;dry-tow;floating-on/floating-off;semi-submersible vessel;stability analysis
国家科技重大专项(2016ZX05057013)经费资助。
魏佳广(1986-),男,甘肃白银人,工程师,2011年毕业于辽宁石油化工大学化工过程机械专业,现主要从事海洋石油平台等设施安装设计及相关技术研究工作。
2017-03-29
10.3969/j.issn.1001-2206.2017.04.008
Email:weijg@mail.cooec.com.cn
