自装卸式垃圾车拉杆式提升机构的理论分析
2017-09-03简溪金
简溪金
JIAN Xi-jin
福建龙马环卫装备股份有限公司 福建龙岩 364028
自装卸式垃圾车拉杆式提升机构的理论分析
简溪金
JIAN Xi-jin
福建龙马环卫装备股份有限公司 福建龙岩 364028
为了更加深入掌握自装卸式垃圾车拉杆式提升机构的设计原理及优化方法,介绍了拉杆式提升机构的结构组成和工作原理,并对拉杆式提升机构进行了结构分析、运动分析和受力分析,为今后设计系列拉杆式提升机构提供了参考依据,也对后续性能研究具有很好的指导意义。
自装卸式垃圾车 矢量方程 直接求导法 力矩平衡
1 前言
随着社会的进步,人民生活水平的提高,城市生活垃圾的数量剧增,城市垃圾的收运问题愈发显得突出。自装卸式垃圾车作为一种与垃圾压缩中转站配套使用的环卫专用车辆,主要用于环卫部门对城市桶装生活垃圾进行收集,具有装卸垃圾自动化、运输垃圾密封化等特点。相信随着城市化进程的加快,自装卸式垃圾车将会得到更为广泛的应用。
作为自装卸式垃圾车的一个关键装置,拉杆式提升机构直接关系到整车的使用性能及装载效率,因此其设计的合理性至关重要。设计时,必须对该机构的运动过程及受力情况进行充分地分析,才能使机构的设计合理可靠。
2 拉杆式提升机构的结构组成及工作原理[1]
拉杆式提升机构的结构如图1所示。提升机构主要由液压油缸、提升臂、拉杆、提升架、翻转架、摇杆、滚轮及主导轨等部件组成。
提升臂分别与箱体、液压油缸(活塞杆端)、拉杆通过铰链点连接;液压油缸另一端铰接在箱体上;拉杆另一端与提升架铰接;提升架通过两侧4个滚轮沿翻转架副导轨运动;翻转架与摇杆通过铰接组合成联动副,再由翻转架与摇杆两侧各两个滚轮沿焊于箱体上的主导轨运动。
提升机构的工作原理如下:液压系统通过液压泵提供动力推动双作用液压油缸的活塞杆伸出,提升臂在活塞杆的推力作用下绕其与箱体的铰链点摆动,提升臂带动拉杆向上运动,进而带动挂有垃圾桶的提升架沿翻转架副导轨向上移动,直到垃圾桶抵住翻转架上的压板后,带动翻转架沿主导轨一起向上移动。
当翻转架上端滚轮移动到主导轨顶端曲线轨道末端时,上端滚轮被挡住停止,同时拉杆继续将提升架拉起,使翻转架以上端滚轮轴心线为翻转轴翻转垃圾桶,直到完成桶内垃圾自动倾卸。
清空垃圾后,通过双作用液压油缸反向进油,活塞杆开始回缩,提升臂反方向摆动,使垃圾桶退回到初始位置,完成一次自动填装垃圾的工作过程。

图1 拉杆式提升机构的结构简图
3 拉杆式提升机构结构分析
要使机构实现预期的确定运动,自由度数F必须满足下列要求:a. F>0;b. F的数量等于原动件的数量[2]。
3.1 工况1
图2所示为拉杆式提升机构简图a,图中O、A、B、C、D、E、H、K分别为铰链的回转中心,1、2、3、4视作机构中的连杆(注:如图1所示,当垃圾桶被提升至抵住翻转架上的压板后相对翻转架静止,图2中的DEF可视为一个单一构件3),5为液压缸活塞杆,6为液压缸缸筒,其自由度数Fa:

式中,n为活动构件数目;P1为低副数目;Ph为高副数目。

图2 拉杆式提升机构简图a
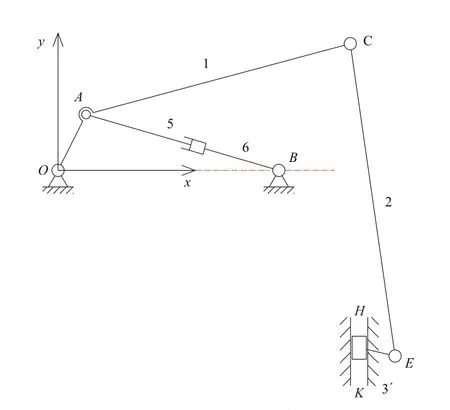
图3 拉杆式提升机构简图b
由于机构中仅件5作为原动件,因此机构的运动并不确定,这与实际情况不符,其实在实际工况下,当点H和点K两处滚轮运动自如时,提升架在竖直上提的过程中并不会绕点H旋转,只会随着翻转架沿主导轨竖直上移,因此在进入主导轨顶端曲线轨道之前的过程中需将件3及件4视为单一构件3′,机构简图如图3所示。此时其自由度数Fb:

Fb等于主动件数目。
3.2 工况2
当翻转架上端滚轮移动到主导轨顶端曲线轨道末端后,绕上端滚轮轴心线翻转垃圾桶时,件4及其所附带的运动副并没有对机构运动起到实际的限制作用,故为虚约束,因此在机构运动分析中可忽略(图4中用虚线表示),机构简图如图4所示。

图4 拉杆式提升机构简图c
这时其自由度数 Fc=3n-2Pl-Ph=3×5-2×7=1,亦等于主动件数目。此时,机构只需操纵双作用液压缸,即可完成预定的动作。
由上述分析可知,采用双作用液压缸驱动,可实现反向自锁,使机构在运送垃圾桶的过程中不会由于自重自行下落而造成人员意外伤害。
4 拉杆式提升机构运动分析
运用解析法分析翻转架沿主导轨上升时的速度及加速度和当翻转架上端滚轮移动到主导轨顶端曲线轨道末端后,垃圾桶绕上端滚轮轴心翻转时的角速度及角加速度。翻转架沿主导轨上升时的模型如图5所示,翻转架上端滚轮移动到主导轨轨道末端模型如图6所示。

图5 翻转架沿主导轨上升时模型

图6 翻转架上端滚轮移动到主导轨轨道末端模型
由图5可得封闭矢量环方程如下,各矢量与x轴的夹角以逆时针方向为正方向:
方程中各矢量向x轴、y轴投影,得如下位置方程:

上述位置方程中L2、L3、L4、e由结构确定,各角度又有如下关系式:

由三角形余弦定理得:
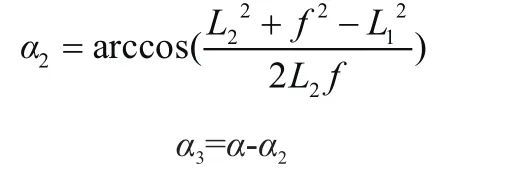
式中,α为OA与OC夹角,已由提升臂结构确定;f为基座OB两点间距离。

解上述位置方程可求出位移s。

对s求导数可求出速度与加速度。
由上图6得封闭矢量环方程如下,各矢量与x轴的夹角以逆时针方向为正
方程中各矢量向x轴、y轴投影,得如下位置方程:

上述位置方程中L2、L3、 L4、 L5、 L6、α6由结构确定,另由图6得:

式中,L1为油缸行程变化后的油缸总长度;L2为提升臂OA两点间的长度;L3为提升臂OC两点间的长度;L4为拉杆长度;L5为翻转架EF两点间的长度;L6为油缸座固定点B与主导轨顶端曲线轨道末端滚轮中心F两点间距离; e为油缸座固定点B与主导轨水平方向的距离;f为提升臂固定点O与油缸座固定点B两点间的距离;s为翻转架沿主导轨垂直上升的距离;α1为L1与x轴正方向的夹角;α2为 L2与x轴正方向的夹角;α3为L3与x轴正方向的夹角;α4为L4与x轴正方向的夹角;α5为L5与x轴正方向的夹角;α6为L6与x轴正方向的夹角。
联立两方程求解,可将α4和α5分别用α3的代数式表示,此工况下α3=α2-α。
代入后可求出角位移α5,对α5求导数可求出角速度与角加速度。
5 拉杆式提升机构受力分析
根据拉杆式工作过程,可以将提升机构分为三个临界运动状态。一是垃圾桶即将被提起的状态;二是垃圾桶被提到主导轨末端开始倾倒垃圾的瞬时状态;三是垃圾桶倾倒完垃圾后的状态。
5.1 垃圾桶即将被提起状态
图7为垃圾桶即将被提起状态时的提升机构受力关系图,此时垃圾桶处于将被提起的状态,在该状态下各构件的受力情况如下。
5.1.1 垃圾桶受力
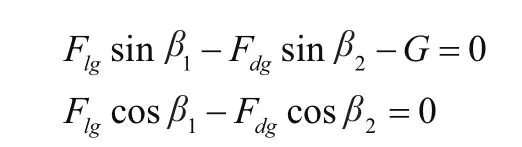
联立两方程解得:

式中,F1g为拉杆对垃圾桶作用的力;Fdg为主导轨对垃圾桶作用的力;β1为拉杆与水平线之间的夹角;β2为Fdg方向与水平线之间的夹角;b为拉杆与提升架之间的铰接点到坐标y轴反向延长线的水平距离;此时α3=α-α2。

图7 垃圾桶即将被提起状态时的提升机构受力关系图
5.1.2 铰接点C的受力
当不考虑拉杆自重时,拉杆l4是二力杆,Flg与 Flg'受力大小相等,故铰接点C的受力大小为:

5.1.3 铰接点A的受力
对O点取矩,提升机构对B点的作用力为P1,由力矩平衡得:
由图7得式中:

代入可得:
5.2 垃圾桶被提到主导轨末端开始倾倒垃圾的瞬时状态图8为垃圾桶被提到主导轨末端开始倾倒垃圾状态提升机构受力关系图,在此状态下图2中的DF连线与垃圾桶仍保持平行,在该状态下各构件的受力为:

5.2.1 垃圾桶受力式中,l为垃圾桶的宽度;l4为拉杆的长度;l7为上滚轮中心H到拉杆与垃圾桶的铰接点E的距离;l8为垃圾桶质心到平行于垃圾桶上边沿且经过上滚轮中心H的直线的距离;l10为上滚轮中心H到垃圾桶左边沿的距离;β3为l4与l7之间的夹角;β4为上滚轮中心与铰接点D的连线与竖直y轴之间的夹角,l为上滚轮中 心F与铰接点D连线之间的距离;
9l11为铰接点D到经过上滚轮中心H的水平线的竖直距离。

图8 垃圾桶在主导轨末端开始倾倒垃圾状态提升机构受力关系图
5.2.2 铰接点C的受力
当不考虑拉杆自重时,拉杆l4是二力杆,Flg与 Flg'受力大小相等,故铰接点C的受力大小为:

5.2.3 铰接点A的受力
对O点取力矩,提升机构对B点的作用力为P2,由力矩平衡得:

由图8得知:

代入可得:

5.3 垃圾桶倾倒完垃圾状态提升机构受力分析
图8所示为垃圾桶倾倒完垃圾状态提升机构受力关系图,两滚轮中心连线与竖直y轴之间的夹角较图8不变,在该状态下各构件的受力为:

图9 垃圾桶倾倒完垃圾状态提升机构受力关系图
5.3.1 垃圾桶受力


式中,β1为拉杆与水平线之间的夹角。
5.3.2 铰接点C的受力
当不考虑拉杆自重时,拉杆l4是二力杆,Flg与Flg'受力大小相等,故铰接点C的受力大小为:
5.3.3 铰接点A的受力
对O点取力矩,提升机构对B点的作用力为P3,由力矩平衡得:

由图9得:

代入可得:

6 结语
通过以上一系列分析,可以得到设计和选择液压缸和主要结构件强度校核的理论依据,此分析方法对类似平面多连杆机构具有普遍适用性,为后续的机构优化研究奠定了基础。
[1]徐达,蒋崇贤.专用汽车结构与设计[M].北京:北京理工大学出版社,1998.
[2]张春林.机械原理[M].北京:高等教育出版社,2006.
Theoretical Analysis of Pull-rod Lifting Mechanism of Self-loading Garbage Truck
In order to grasp the design principle and optimization method of the pull-rod lifting mechanism more deeply, the structure and working principle of the pull-rod lifting mechanism was introduced, and the structural analysis,the kinematic analysis and the force analysis separately to the pull-rod lifting mechanism were carried out, providing a reference for designing a series of the pull-rod lifting mechanisms and having a good guiding significance for the follow-up performance research.
self-loading garbage truck; vector equation; direct derivation method; moment balance
U469.6+91.02
A
1004-0226(2017)08-0102-05
简溪金,男,1987年生,工程师,现从事环卫车辆设计研发。
2017-06-30