遥感相机姿态控制轴的动平衡结构设计与验证
2017-08-31刘丙友竺长安
刘丙友 竺长安 郭 杰 金 一
1.安徽工程大学电气工程学院,芜湖,2410002.中国科学技术大学工程科学学院,合肥,230027
遥感相机姿态控制轴的动平衡结构设计与验证
刘丙友1,2竺长安2郭 杰2金 一2
1.安徽工程大学电气工程学院,芜湖,2410002.中国科学技术大学工程科学学院,合肥,230027
多个遥感相机固定在一颗遥感卫星上,调整其中一个遥感相机工作姿态的反作用力产生的角动量会改变遥感卫星的姿态,进而影响其他遥感相机的工作姿态。为了在遥感相机姿态控制轴内自平衡该角动量,减小影响,设计了一种遥感相机姿态控制轴动平衡机械机构。该机构主要由一个驱动电机、一个主轴、一个传动齿轮系、一个增速器及一个角动量平衡轮组成。机构工作时,电机转子驱动主轴带动遥感相机姿态控制轴调整相机姿态,同时,电机定子的反作用力通过传动齿轮系、增速器逐级传递,驱动角动量平衡轮旋转。通过调整角动量平衡轮的质量放大比或者增速器的增速比可得适当量值的平衡轮角动量,实现机构内部动平衡。基于角动量守恒定律和理论力学基本原理,证明了机构设计的正确性。最后,建立了遥感相机姿态控制动平衡机构的三维动态仿真模型,根据机构的实际参数,设定了机构的仿真参数,在给定负载的条件下进行了仿真验证和结果分析,进一步验证了设计的可行性。
角动量动平衡;遥感相机;姿态控制轴;增速器;角动量平衡轮
0 引言
一颗遥感卫星承载多个遥感相机的工作方式正逐渐成为研究热点,这种工作方式下,当调整其中一个遥感相机的工作姿态(如俯仰角度)时,反作用力会产生角动量,该角动量会改变遥感卫星的姿态,进而影响到其他遥感相机的工作姿态。特别是在失重环境下,微小的反作用角动量会产生极大的影响。因此,期望设计遥感相机姿态控制轴的一种动平衡机械机构,在某一遥感相机调整姿态时,能够内部自平衡反作用力产生的角动量,避免对其他遥感相机姿态产生影响。
国内外关于角动量自平衡或者角动量管理的研究已经取得了一些进展,如:针对分布式小卫星系统对姿态控制单元小型化的要求,提出基于轴向磁通电动机的反作用飞轮系统设计方案[1]。文献[2-3]给出了自重作用下3自由度气浮台的不平衡力矩的消除方法。通过对推力模型的简化,得出了推力器最优偏转方向的解析解,提出了电推进卫星角动量的卸载方法[4]。文献[5]采用影响系数法实现旋转机械整机动平衡,使风机的振动速度从4.3 mm/s降至0.3 mm/s。参考内模原理扩维方程,文献[6]设计了最优控制方法进行惯性系的角动量管理。文献[7]通过调整航天器姿态,使引起控制力矩陀螺角动量积累的扰动力矩相互抵消来进行航天器的角动量管理。文献[8-9]采用混合模型给出了低质量小卫星角动量的二次分配方法。文献[10]采用反作用飞轮实现了小卫星大角度姿态控制时的角动量平衡。为了利用补偿飞轮来抑制卫星转动部件引入的角动量干扰问题,文献[11]在分析补偿原理的基础上设计了一个工程上易于实现的双闭环控制器来控制补偿飞轮消除角动量干扰影响。针对传统平衡角动量方案只能消除转动体在匀速运行状态时系统角动量的缺点,文献[12]介绍了一种利用转动惯量小、转速快的转盘,使其瞬时速度对应于转动体瞬时速度来平衡角动量。控制力矩产生的角动量也可以采用偏置动量轮控和磁控的三轴稳定控制方案来消除[13]。文献[14]基于磁悬浮轴承技术对角动量反作用飞轮的结构外形尺寸进行了动态优化设计,可以确保反作用飞轮结构在给定设计转速下角动量能达到一定值,使反作用飞轮的质量最小, 优化结果令人满意。上述研究虽然从不同方面给出了角动量自平衡的方法及应用,但没有给出具体的设计准则,没有针对实际机构给出基于理论力学及角动量守恒上的理论验证及仿真验证,也没有给出角动量平衡轮质量放大比等具体设计参数。
本文设计了遥感相机姿态控制轴的一种动平衡机械结构,并给出了具体的设计参数。首先建立了动平衡机械机构的模型,在机构中使用了电机驱动和齿轮增速器。电机转子对外作用时定子的反作用通过传动齿轮系、增速器逐级传动至角动量平衡轮。通过调整角动量平衡轮的质量放大比或者增速器的增速比可得到适当的角动量,从而内部自平衡电机反作用力产生的角动量。然后,基于理论力学和角动量守恒原理,在模型的基础上通过受力分析,对机构进行了理论分析验证。最后,为了进一步验证遥感相机姿态控制轴动平衡机械机构的可行性,使用MATLAB/SimMechanics工具箱有针对性地搭建了机构的三维动态仿真模型,并根据机构实际尺寸设定了各部件的参数,在给定负载的情况下对机构进行了动态仿真验证,通过对仿真结果的分析与讨论,进一步验证了设计的可行性。
1 动平衡机械机构设计
1.1 机构组成与工作原理
遥感相机姿态控制轴的动平衡机械机构主要由以下部件组成:外壳、一个驱动电机、一个主轴、一个太阳轮、三个行星轮、一个增速器、一个角动量平衡轮。其装配关系如下:主轴的一端与遥感相机姿态控制轴连接,另一端与驱动电机的转子连接,并且与行星轮啮合,行星轮与太阳轮啮合,太阳轮与增速器链接,角动量平衡轮装配在增速器上。其机构原理简图见图1。
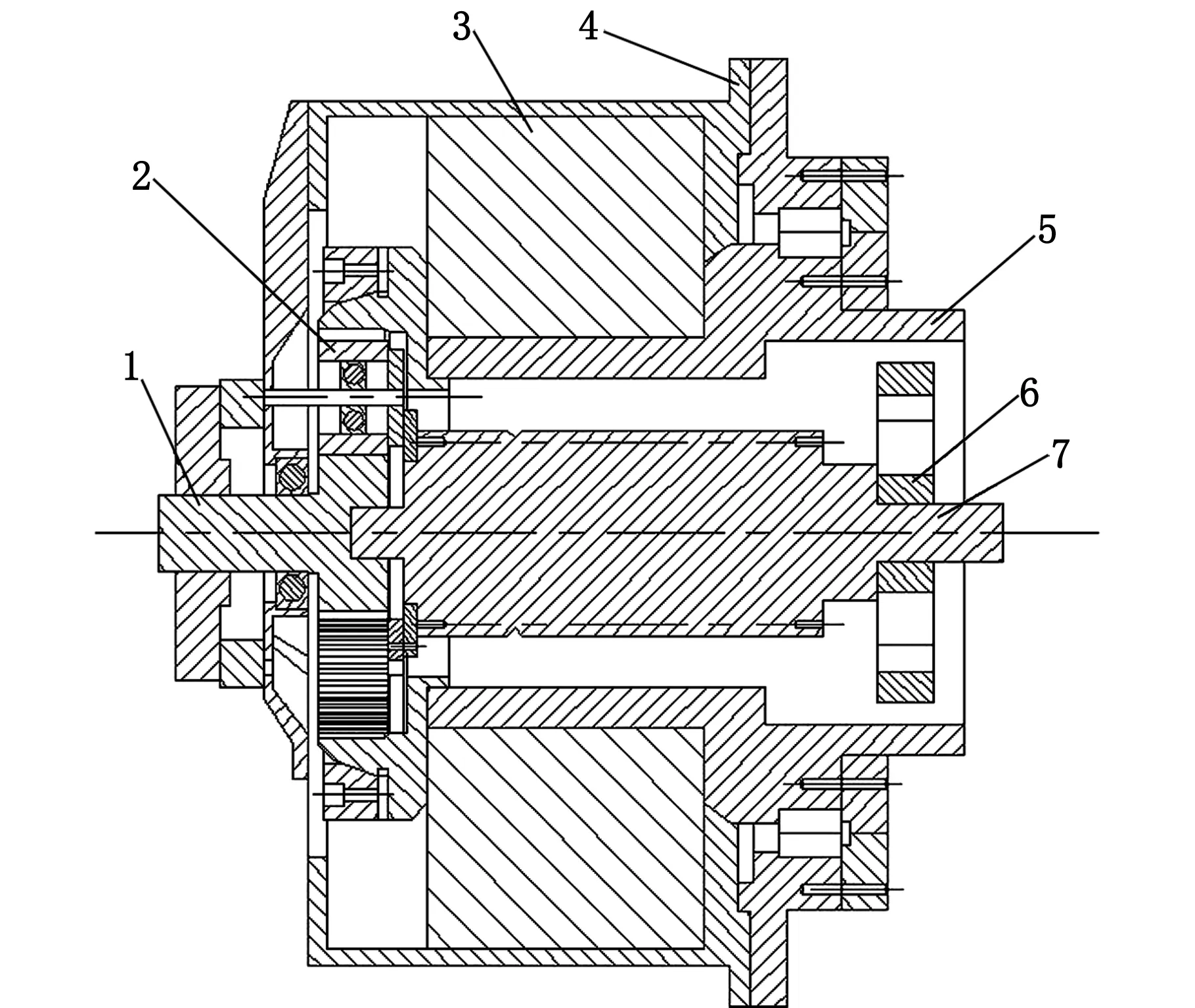
1.太阳轮 2.行星轮 3.电机 4.外壳 5.主轴 6.角动量平衡轮 7.增速器图1 遥感相机姿态控制轴动平衡机械机构原理简图Fig.1 Principle diagram of the angular momentum balancing mechanism of remote sensing camera posture control axis
各部件的工作原理解析如下:遥感相机姿态控制轴动平衡机械机构的部件固定在特制外壳内,外壳固定在遥感卫星表面的固定件上。电机转子驱动主轴旋转,主轴带动遥感相机姿态控制轴控制相机姿态。主轴在驱动遥感相机姿态控制轴的同时,电机定子反作用力驱动行星轮转动,行星轮驱动太阳轮,太阳轮驱动增速器,增速器驱动角动量平衡轮转动。角动量平衡轮的角速度可以通过调节增速器的增速比来调整,从而得到量值相当的角动量。若增速器的增速比固定,通过改变角动量平衡轮的质量放大比(包括改变角动量平衡轮的半径和质量),也可改变角动量平衡轮的角动量,实现遥感相机姿态控制轴的动平衡。
1.2 齿轮设计
齿轮是遥感相机姿态控制轴动平衡机械机构传动作用力的关键部件,由一个太阳轮和三个行星轮组成,齿轮的示意图见图2。其中,圆形主轴1的半径设为R1,角速度设为ω1,自身及其连接部件的总转动惯量设为J1;三个行星轮2的半径设为R2,角速度设为ω2,其自身及其连接部件的总转动惯量设为J2;太阳轮3的半径设为R3,角速度设为ω3,其自身及其连接部件的总转动惯量设为J3。角动量平衡轮的半径设为R4,角速度设为ω4,其自身及其连接部件的总转动惯量设为J4;增速器的增速比设为n。由齿轮的示意图,可得主轴、太阳轮和行星轮的半径关系[15]为
R1=2R2+R3
(1)
主轴、太阳轮和行星轮的角动量关系为
ω1R1=ω2R2=ω3R3
(2)
角动量平衡轮和太阳轮的角速度关系为
ω4=nω3
(3)
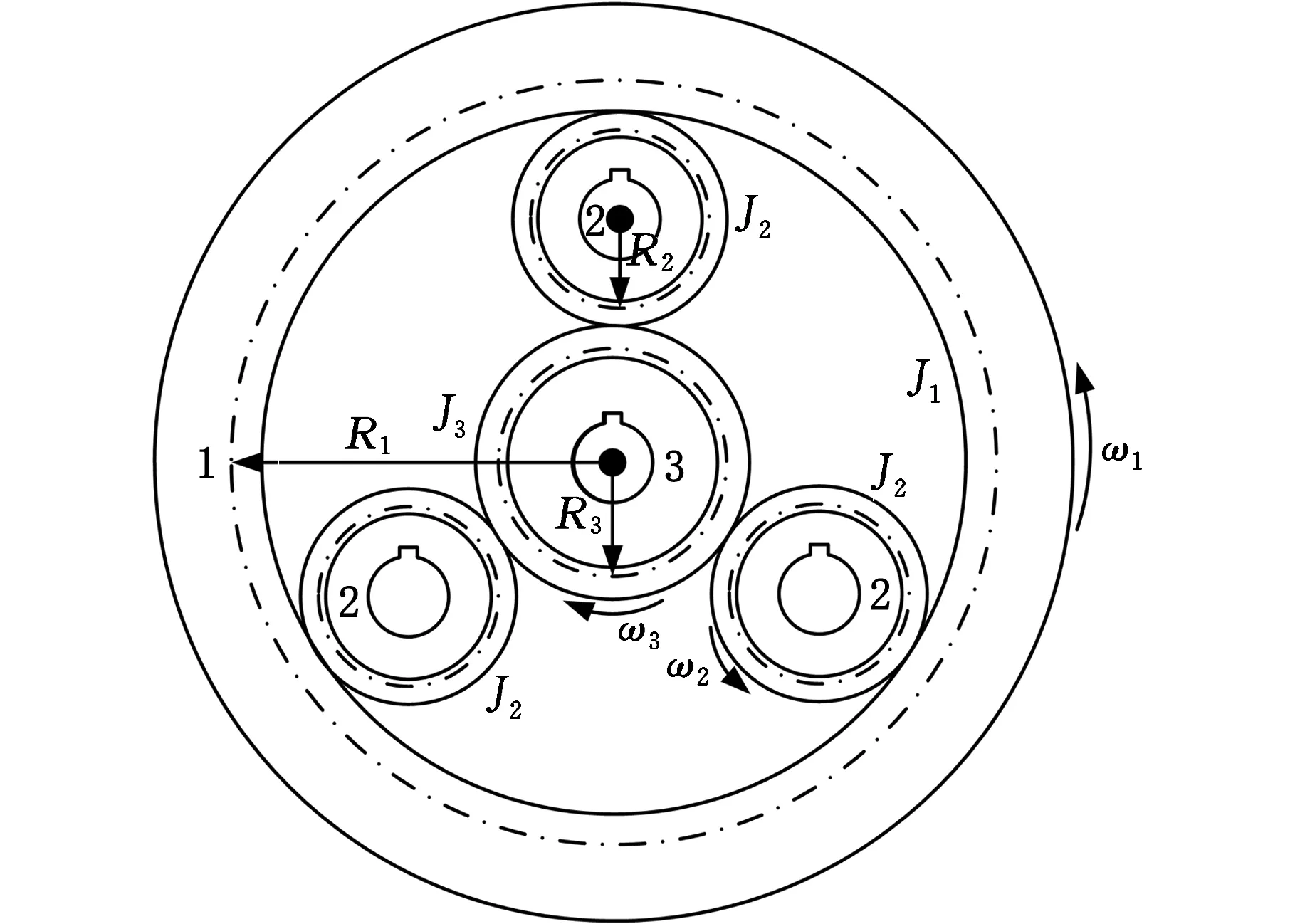
图2 齿轮的示意图Fig.2 Schematic diagram of the gear
2 建模与理论验证
2.1 电机模型
遥感相机姿态控制轴动平衡机械机构由一个电机驱动,为得到电机数学模型,现作如下假设:整个传动过程中无能量损失;忽略摩擦对整个结构的影响,即在整个传动的过程中机构不受摩擦力的作用,则电机的数学模型如下[16]:
(4)
式中,u(t)为电机的输入电压;i(t)为电机的输入电流;L为电机的定子绕组电感;R为电机的定子绕组相电阻;J为电机的转动惯量;e(t)为电机的反电动势;Ke为电机的反电动势系数;Km为力矩系数;Kf为折合到电机轴上的黏性摩擦系数;Mf为整个外界摩擦产生的反向扭矩;Md(t)为电机输出扭矩,即整个机械结构的输入扭矩,也是外壳受到的反向扭矩;ω(t)为主轴转动角速度。
2.2 理论验证
为了在理论上验证遥感相机姿态控制轴动平衡机械机构设计的可行性,给电机施加一个驱动电流,假设电机施加给主轴一个逆时针方向的扭矩Md(t),电机转子逆时针方向驱动主轴转动,同时会对外壳产生一个顺时针方向的反作用扭矩Md(t)[17]。结构受力分析如下:电机转子施加给主轴一个逆时针方向的作用力F1,同时,电机定子施加一个大小相等方向相反的作用力在行星轮上;行星轮施加给太阳轮一个作用力F2,受力分析见图3。
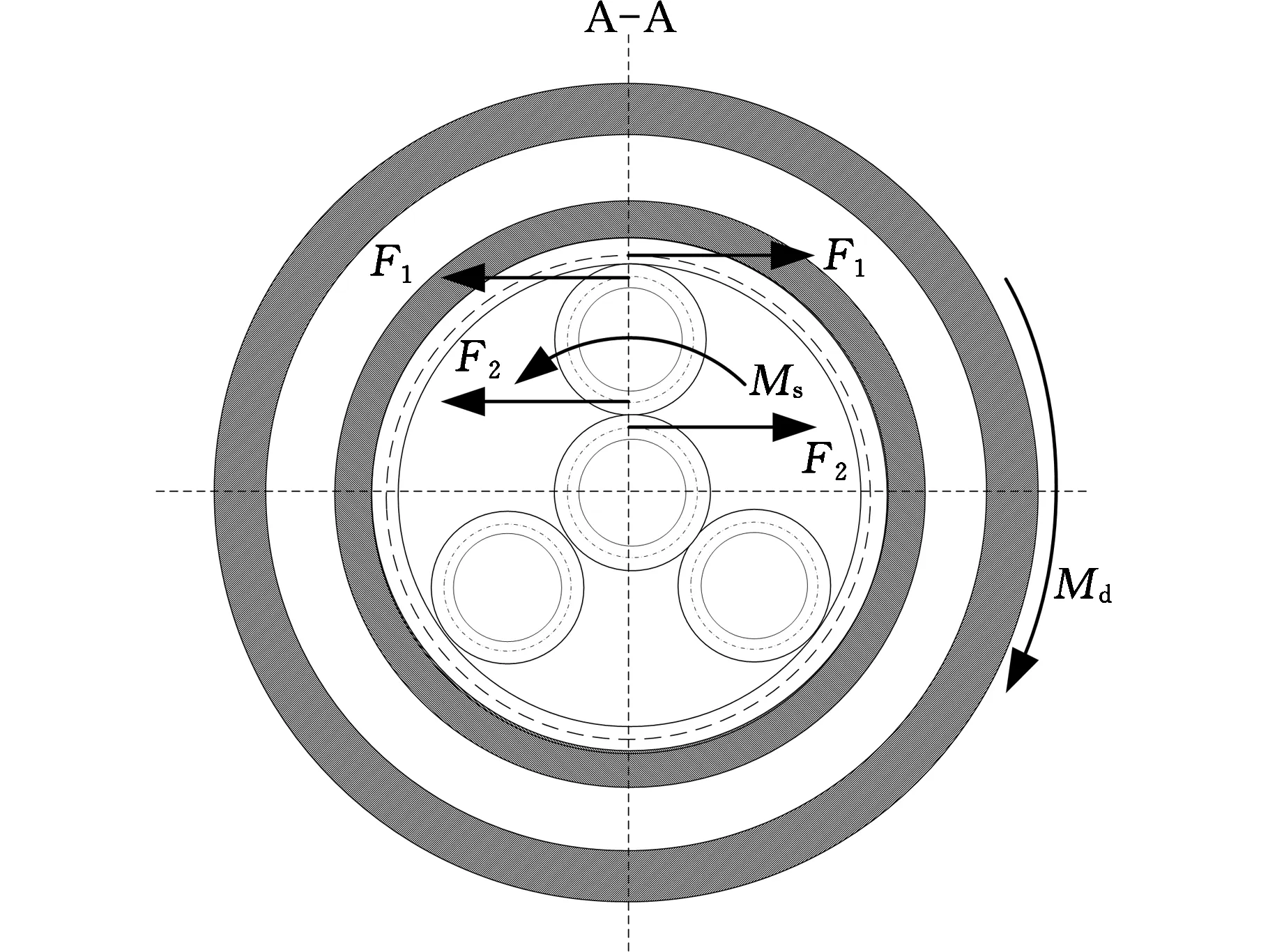
图3 齿轮系的受力图Fig.3 Force analyze diagram of the gear system
在力F1、F2作用下,行星轮产生一个反向扭矩,记为Ms(t),Md(t)与Ms(t)方向相反且满足以下关系:
(5)
求解式(5),可得
(6)
遥感相机姿态控制轴动平衡机械机构角动量输出记为M(t),则有
M(t)=Md(t)-Ms(t)=
(7)
2.3 结果分析
遥感相机姿态控制轴动平衡机械机构的作用是当电机通过主轴驱动遥感相机姿态控制轴时,机构内部平衡反作用力产生的角动量对外无角动量输出,实现了动平衡,即
M(t)=0
(8)
通过上文的分析,当M(t)=0时,即
(9)
对式(9)两边同时积分可得
J1ω1(t)+J2ω2(t)=J3ω3(t)+J4ω4(t)
(10)
其中,J1ω1(t)+J2ω2(t)为逆时针角动量,J3ω3(t)+J4ω4(t)为顺时针角动量。通过选取适当的角动量平衡轮半径、质量等参数可以使式(10)成立,也可以通过选取适当的增速比使式(10)成立。至此,基于理论力学和角动量守恒原理,证明了设计的遥感相机姿态控制轴动平衡机械机构的可行性。
3 仿真验证及结果分析
遥感相机工作在失重环境下,因此在搭建其动平衡机械结构的三维动态仿真模型时首先设置重力参数为零,即使得整个模型不受重力影响,可以在自由空间运动,从而满足太空失重的条件,在此基础上进行仿真验证具有一定的实际意义。
3.1 仿真模型
根据遥感相机姿态控制轴动平衡机械机构的组成,使用MATLAB/SimMechanics工具箱建立图4所示的三维动态仿真模型示意图。在图中主轴通过内齿轮与行星齿轮啮合进行转动的传递,进而带动太阳轮做反向旋转,太阳轮带动角动量平衡轮旋转,形成反向角动量,实现遥感相机姿态控制轴动平衡机械机构的动平衡。由于电机转子与定子之间的扭矩为相互作用,电机工作时对外壳施加与主轴扭矩方向相反的扭矩,因此如果调整角动量平衡轮的角动量,能够使得外壳静止不动,即表示遥感相机姿态控制轴动平衡机械机构内部角动量实现平衡。
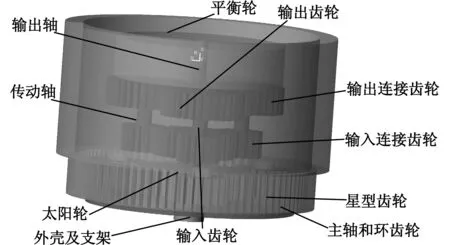
图4 遥感相机姿态控制轴动平衡机械机构三维 动态仿真模型示意图Fig.4 Three-dimensional dynamic simulation model of the angular momentum balancing mechanism of remote sensing camera posture control axis
3.2 仿真分析
根据遥感相机及其姿态控制轴动平衡机械结构的实际尺寸,本文在仿真时有针对性地设计了仿真参数,以达到和实际试验相当的效果。遥感相机姿态控制轴动平衡机械结构的实际参数和仿真参数见表1。

表1 遥感相机姿态控制轴动平衡机械结构的实际参数和仿真参数Tab.1 Actual parameters and simulation parameters ofthe angular momentum balancing mechanism of remotesensing camera posture control axis
3.2.1 调整角动量平衡轮的质量放大比
角动量平衡轮的质量放大比是表征角动量平衡轮角动量大小的数值,可以通过改变平衡轮的半径和质量调整。根据表1的参数,通过调整角动量平衡轮质量放大比,得到表2所示的外壳角速度与平衡轮质量放大比之间关系的数据和图5所示的外壳角速度与平衡轮质量放大比关系的仿真曲线。
由仿真曲线可以看出,在角动量平衡轮质量放大比极大和极小两种极端情况下,外壳角速度受角动量平衡轮质量放大比的影响呈近似S形曲线,且正负的变化必然穿越外壳角速度为0的横轴,即必然存在某一个质量放大比,使得在角动量平衡轮作用下遥感相机姿态控制轴动平衡机械结构内部角动量平衡不对外壳产生影响。
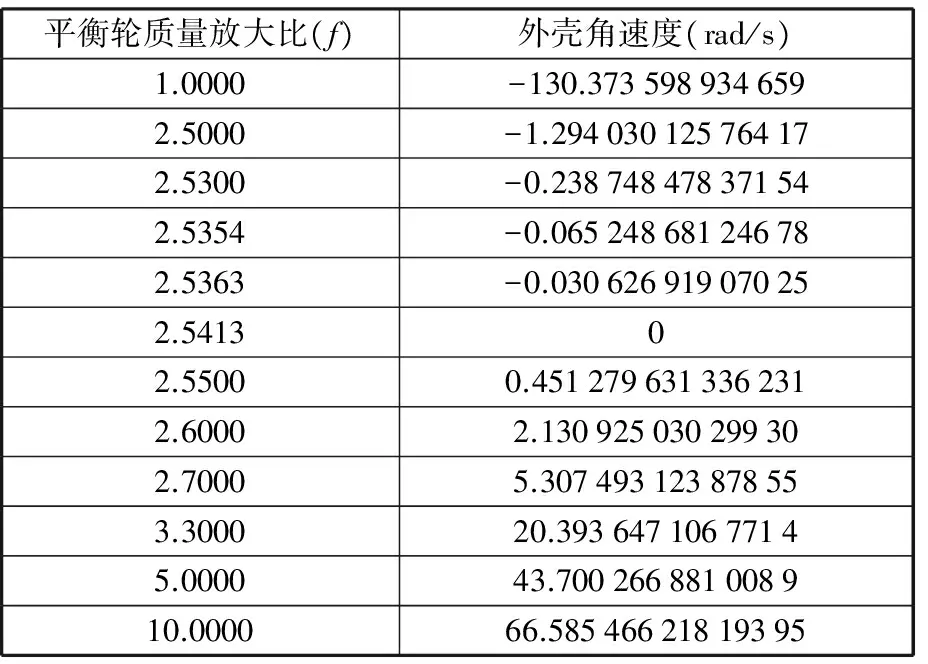
表2 外壳角速度与角动量平衡轮质量放大比关系数据Tab.2 Relation parameters of mass amplification factor of angular momentum balance wheel and angular velocity of shell
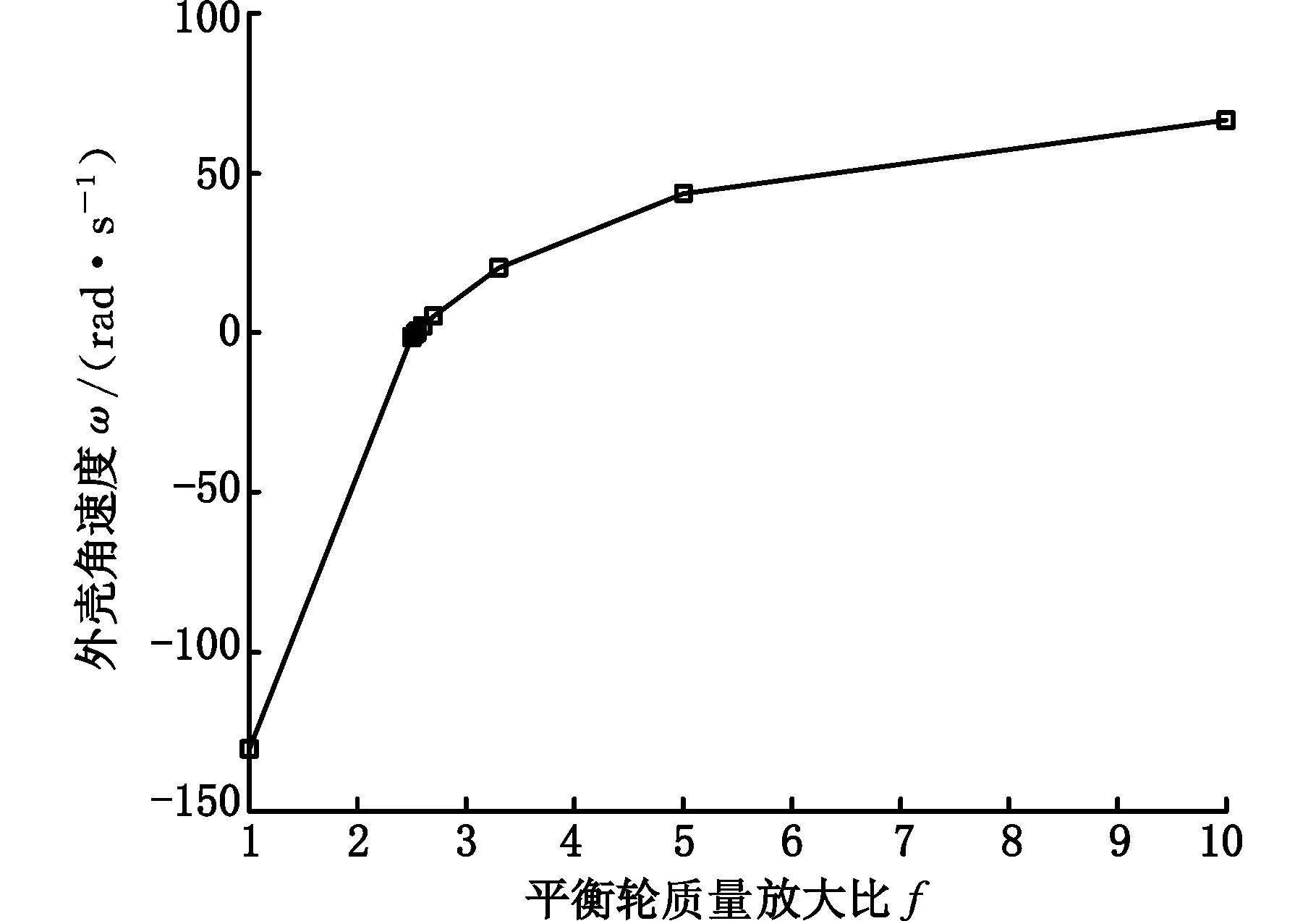
图5 外壳角速度与角动量平衡轮质量放大比关系曲线Fig.5 Relation curve of mass amplification factor of angular momentum balance wheel and angular velocity of shell
图5显示当平衡轮质量放大比小于2.5413时,外壳角动量为负值,即外壳与主轴转动方向相反。不断减小角动量平衡轮质量放大比,外壳角动量也不断减小,即负向增大,达到一定程度后,角动量变化将不再明显,趋于稳定,即当平衡轮质量放大比无限小时,相当于没有平衡轮,此时就是电机在自由空间的旋转,即定子转子反向旋转,此时为小质量平衡轮下的稳定状态;当角动量平衡轮质量放大比为2.5413时,外壳不受电机转子和定子的影响,静止不动,说明遥感相机姿态控制轴动平衡机械结构此时实现动平衡;当角动量平衡轮质量放大比大于2.5413时,外壳角动量为正值,即外壳与主轴转动方向相同。不断增大平衡轮放大系数,外壳角动量也不断增大,达到一定程度后,角动量趋于稳定,即当角动量平衡轮质量无限大时,无法被带动,相当于固定不动,为大质量角动量平衡轮下的稳定状态。
角动量平衡轮的质量放大比可以根据需要通过如下方法调整:配备多种半径和多种材质的角动量平衡轮。
3.2.2 调整增速器的增速比
除通过调整角动量平衡轮质量放大比实现遥感相机姿态控制轴动平衡外,还可以通过调整增速器的增速比实现动平衡。设定角动量平衡轮质量放大比不变,调节增速器的增速比进行仿真测试,实验数据如表3所示,关系曲线如图6所示。
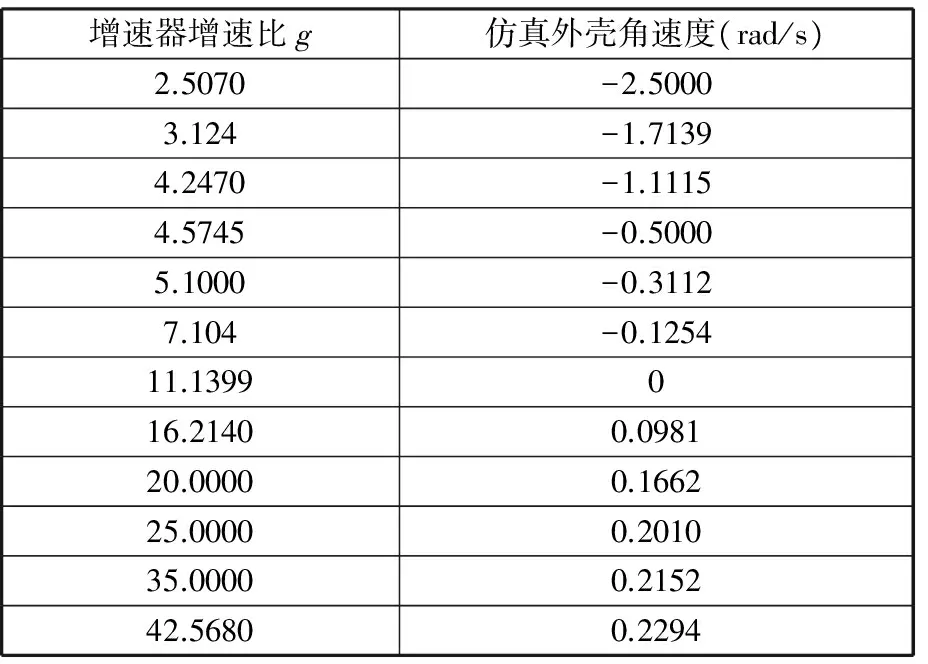
表3 外壳角速度与增速器增速比关系数据Tab.3 Relation parameters of speed increasing ratio of gear speeder and angular velocity of shell
图6 外壳角速度与增速器增速比关系曲线Fig.6 Relation curve of speed increasing ratio of gear speeder and angular velocity of shell
由图6仿真曲线可以看出,在增速器增速比极大和极小两种极端情况下,外壳角速度受增速器的增速比的影响呈近似S形曲线,且正负的变化必然穿越外壳角速度为0的横轴,即必然存在某一个增速比使得遥感相机姿态控制轴动平衡机械结构内部角动量平衡,不对外壳产生影响。
图6中,随着增速器的增速比逐渐增大,遥感相机姿态控制轴动平衡机构外壳反向转动角速度逐渐减小;在增速比达到11.1399时外壳角速度完成由反向转动到正向转动的转变,此时,实现动平衡;当增速比大于11.1399时,外壳正向转动。调节增速比可以实现遥感相机姿态控制轴动平衡。在表1给定的参数下,增速比达到11.1399时实现动平衡。
4 结论
(1)由驱动电机、主轴、传动齿轮系、增速器及角动量平衡轮组成的遥感相机姿态控制轴动平衡机械机构,可以在机构内部有效自平衡遥感相机主轴对外作用时反作用力产生的角动量,实现动平衡。
(2)基于理论力学和角动量守恒的基本理论,通过计算可知,调整角动量平衡轮的质量放大比或者调整增速器的增速比可以实现动平衡,证明了所设计的遥感相机姿态控制轴动平衡机械机构的可行性。
(3)仿真结果表明,在失重环境下、负载质心转动惯量为1.92 kg·mm、电机给定输入扭矩为10 N·m、各个关节阻尼系数均为0.001时,角动量平衡轮的质量放大比为2.5413、增速器的增速比为11.1399时实现动平衡。
[1] 王辉, 武俊峰,李胤, 等. 基于轴向磁通电动机的反作用飞轮系统设计[J].机械工程学报,2013,49(17):158-163. WANG Hui, WU Junfeng, LI Yin, et al. Design of the Reaction Flywheel System Based on Axial-flux Motor[J]. Journal of Mechanical Engineering,2013,49(17):158-163.
[2] 王祖温,李延斌, 包钢. 3自由度气浮台力学性能研究—关于自重作用下不平衡力矩的分析[J].机械工程学报,2006,42(4):179-184. WANG Zuwen, LI Yanbin, BAO Gang. Study on the Mechanics Property of Three Degrees of Freedom Air-bearing Testbed—Analysis on Unbalance Torque Acted on Gravity[J]. Journal of Mechanical Engineering,2006,42(4):179-184.
[3] 李延斌, 王祖温, 包钢, 等. 3自由度气浮台力学性能研究—自重作用下平台结构平衡敏感性分析[J].机械工程学报,2008,44(11):310-316. LI Yanbin, WANG Zuwen, BAO Gang, et al. Study on the Mechanics Property of Three Degrees of Freedom Air-bearing Spacecraft Simulator-equilibrium Sensitivity Analysis of the Platform Structure under Gravity Load[J]. Journal of Mechanical Engineering,2008,44(11):310-316.
[4] 马雪,韩冬,汤亮.电推进卫星角动量卸载研究[J].中国空间科学技术,2016,36(1):70-76. MA Xue, HAN Dong, TANG Liang. Study on Moment Dumpling of Electric Propulsion Satellite[J]. Chinese Space Science and Technology,2016,36(1):70-76.
[5] 张志新. 单双校正面现场智能整机动平衡仪的研制[J].农业机械学报,2003,34(4):127-130. ZHANG Zhixin. Development and Research of an Intellectual Instrument for Whole-machine Spot Balancing with Single and Double Correction Planes Method[J].Transactions of the Chinese Society for Agricultural Machinery,2003,34(4):127-130.
[6] 蒋金哲, 高亚楠, 胡勇. 轨道摄动对航天器角动量管理的影响和补偿[J]. 控制与决策,2014,29(6):979-984. JIANG Jinzhe, GAO Yanan, HU Yong. Effect Analysis and Compensation for Orbit Perturbation in Spacecraft Used Momentum Management[J]. Control and Decision,2014,29(6):979-984.
[7] 朱孟萍, 徐世杰,陈新龙, 等. 基于参数辨识的大型航天器自适应角动量管理[J]. 空间控制技术与应用,2014,40(3):47-52. ZHU Mengping, XU Shijie, CHNE Xinlong, et al. Adaptive Momentum Management of Large Spacecraft Based on Parameter Identification[J]. Aerospace Control and Application,2014,40(3):47-52.
[8] BELKACEM K, MARQUES J P, GOUPIL M J, et al. Angular Momentum Redistribution by Mixed Modes in Evolved Low-mass Stars Ⅰ. Theoretical Formalism[J].Astronomy & Astrophysics,2015, A30:1-12.
[9] BELKACEM K, MARQUES J P, GOUPIL M J, et al. Angular Momentum Redistribution by Mixed Modes in Evolved Low-mass Stars Ⅱ. Spin-down of the Core of Red Giants Induced by Mixed Modes[J].Astronomy & Astrophysics,2015, A30:1-7.
[10] 金磊,徐世杰. 基于变惯量反作用飞轮的小卫星大角度姿态机动控制研究 [J].宇航学报,2007,28(3):566-570. JIN Lei, XU Shijie. Large Angle Attitude Maneuver Control for Small Satellite Using Variable Inertial Reaction Wheels[J]. Journal of Astronautics,2007,28(3):566-570.
[11] 王磊,葛升民,甘克力. 星载角动量补偿系统的高/低权控制[J]. 哈尔滨工业大学学报,2013,45(11):19-25. WANG Lei, GE Shengmin, GAN Keli. High-authority/Low-authority Control for Angular Momentum Compensation System on Satellite[J]. Journal of Harbin Institute of Technology,2013,45(11):19-25.
[12] 方丹,傅雨田. 平衡大惯量转动体运动过程中产生的角动量分析[J].微特电机,2006,34(1):13-16. FANG Dan, FU Yutian. Analysis of Balancing Angular Momentum Producing during Super Inertia Rotor’s Running[J]. Small & Special Electrical Machines,2006,34(1):13-16.
[13] 王淑一, 张笃周, 王勇. 偏置动量小卫星抗干扰能力分析与验证[J]. 航天器工程,2010,19(1):24-29. WANG Shuyi, ZHANG Duzhou, WANG Yong. Anti-disturbance Capacity Analysis and Verification for Biased Momentum Small Satellites[J]. Spacecraft Engineering,2010,19(1):24-29.
[14] 赵丽滨, 赵友选, 张建宇, 等. 反作用飞轮结构的动态优化设计[J].中国机械工程,2007,18 (2):139-141. ZHAO Libin, ZHAO Youxuan, ZHANG Jianyu, et al. Dynamic Optimum Design of Reaction-wheel Structure[J]. China Mechanical Engineering,2007,18 (2):139-141.
[15] 俞高红, 俞腾飞, 叶秉良, 等. 一种新型行星轮系机构的研究[J]. 机械工程学报,2013,49(15):55-61. YU Gaohong, YU Tengfei, YE Bingliang, et al. Research on a New Planetary Gear Train Mechanism[J]. Journal of Mechanical Engineering,2013,49(15):55-61.
[16] 安群涛, 孙力, 孙立志. 新型开放式绕组永磁同步电机矢量控制系统研究[J]. 中国电机工程学报,2015,35(22):5891-5898. AN Quntao, SUN Li, SUN Lizhi. Research on Novel Open-end Winding Permanent Magnet Synchronous Motor Vector Control Systems[J]. Proceedings of the CSEE,2015,35(22):5891-5898.
[17] 张俊, 刘先增, 焦阳, 等. 基于刚柔耦合模型的行星传动固有特性分析[J].机械工程学报,2014,50(15):104-112. ZHANG Jun, LIU Xianzeng, JIAO Yang, et al. Vibration Analysis of Planetary Gear Trains Based on a Discrete-continuum Dynamic Model[J]. Journal of Mechanical Engineering,2014,50(15):104-112.
(编辑 王艳丽)
Design and Verification of Angular Momentum Balancing Mechanism of Remote SensingCamera Posture Control Axis
LIU Bingyou1,2ZHU Chang’an2GUO Jie2JIN Yi2
1.College of Electrical Engineering, Anhui Polytechnic University, Wuhu, Auhui,2410002.School of Engineering Science, University of Science and Technology of China, Hefei,230027
In the occasion that more than one remote sensing cameras were installed on one remote sensing satellite, reaction and angular momentum would be produced by adjusting certain remote sensing camera. This reaction and angular momentum would change the posture of remote sensing satellite, and then influence the posture of other remote sensing cameras. An angular momentum balancing mechanism was designed to balance the angular momentum in posture control axis of remote sensing camera. This angular momentum balancing mechanism was composed of a motor, a principal axis, a gear system, a gear speeder and an angular momentum balance wheel. In the mechanism, the principal axis was driven by the motor rotor, the principal axis drives the posture control axis of remote sensing camera, meanwhile, the reaction of the motor stator drives the gear system and rotates the angular momentum balance wheel via the gear speeder. The angular momentum could be calculated by adjusting the quality amplification coefficient of the angular momentum balance wheel or the speed increasing ratio of the gear speeder. Thus, the angular momentum internal self-balancing can be realized. Then, the correctness of mechanism design was proved by the principle of angular momentum conservation and the basic principles of theoretical mechanics. Finally, a three-dimensional dynamic simulation model of the mechanism was established and the simulation parameters of the mechanism were set according to the actual parameters of the mechanism. Simulations were carried out with given load and results are analyzed. The feasibility of the mechanism design is further validated.
angular momentum balancing; remote sensing camera; posture control axis; gear speeder; angular momentum balance wheel
2016-12-23
国家自然科学基金资助项目(51605464);安徽省教育厅自然科学基金重点资助项目(KJ2015A316)
TH112
10.3969/j.issn.1004-132X.2017.16.005
刘丙友,男,1980年生。安徽工程大学电气工程学院副教授,中国科学技术大学工程科学学院博士研究生。主要研究方向为智能机械与智能控制。E-mail: lby009@mail.ustc.edu.cn。竺长安,男,1957年生。中国科学技术大学工程科学学院教授、博士研究生导师。郭 杰,男,1987年生。中国科学技术大学工程科学学院博士后研究人员。金 一,男,1984年生。中国科学技术大学工程科学学院博士后研究人员。