一种基于A R M+F P G A的无人机地面测控系统设计与实现
2017-08-30南京模拟技术研究所辛海洋
南京模拟技术研究所 辛海洋 彭 飞
一种基于A R M+F P G A的无人机地面测控系统设计与实现
南京模拟技术研究所 辛海洋 彭 飞
本文基于ARM+FPGA的嵌入式架构,实现单测控站对多目标无人机的可靠控制。其中,ARM微处理器主要负责各无人机GPS/北斗数据的解算,通过解算得到的方位角、俯仰角、天线阵列单元编号信息,完成对无人机的跟踪;FPGA作为协同处理器,一方面提供RS232/RS422/SPI数据接口和时序控制,另一方面完成无人机遥测、遥控数据的高速处理。整个系统采用TDMA(时分多址)的方式,通过对每个通信时隙的精确控制,实现单站远距离多目标无人机的可靠测控。本设计能够实现一站最多9架无人机的同时测控。
ARM;FPGA;无人机;TDMA
0 引言
测控系统作为无人机系统的重要组成部分,主要完成对无人机的遥控、遥测、跟踪定位,实现对机载任务载荷的远距离操纵以及侦察信息的实时传输、监视、记录及分发。在多无人机协同作战技术快速发展的今天,测控系统的工作方式也由一站一机,发展到一站多机。
1 设计原理
本文主要对一站多机的无人机测控地面测控系统实现进行介绍。该系统采用电扫描技术,对无人机具有TDMA(时分多址)+频分+空分的精确控制功能(如图1所示)。通过划分时隙,在每个通信时隙内,完成多组数据的交互。再通过ARM控制解算,完成对个无人机的精确跟踪,实现远距离多目标无人机的可靠测控。
地面测控系统采用ARM+FPGA的嵌入式架构。其中,ARM微处理器采用STM32 Cortex-M3芯片,FPGA采用Xilinx Spartan6系列芯片。可以根据不同型号的无人机,来配置各路串口数据的波特率,也可以在线对遥控、遥测通道进行配置切换。
此外,此地面控制部分具有GPS数据导引跟踪及自动搜索功能,能够通过场强信息快速找到目标无人机。具有故障诊断识别功能和自动重捕功能。本次设计能够实现一站最多9架无人机的同时测控。
2 系统设计
2.1 ARM功能介绍
控制解算模块是地面测控系统的核心。由ARM微处理器(STM32 Cortex-M3芯片)及其外围电路组成。实现功能需要的片内资源包括时钟模块、SPI接口模块、GPIO模块、外部中断、定时/计数器等。其主要实现的功能包括正北标定,与FPGA数据处理模块进行数据交互、多无人机的实时跟踪控制,与显示按键模块的输入输出响应等。

图1 时分通信机制
2.2 FPGA功能介绍
FPGA选取Xilinx Spartan6芯片(低功耗、低成本,同时具有多大150000个逻辑单元等,可以很好的满足设计所需资源量及系统的工作性能),通过SPI总线接口与ARM互联,配备有源晶振,同时选取12个引脚与12个串口互联,控制端口中,预留1各接口,以便升级,功能框图如图2所示。
主要实现多路串口数据的收发及与ARM间的数据交互。FPGA内部定时器负责计时,当一个时隙到来,通知ARM进行高速天线开关的切换,ARM发出开关切换指令,同时把消息反馈给FPGA。FPGA延时几十纳秒后,收遥测指令并解析,再通过SPI总线输出给ARM,通过串口输出给指控设备;同步状态下收遥控指令,解析后经射频组件和天线发送。
2.3 硬件设计
2.3.1 正北标定
在无人机起飞前,利用瞄准镜/GPS组合方式进行正北标定。首先根据选择好的场地,确定测控地面站的站址点,用GPS/北斗定位,并记录其经纬度,作好标记。站址点确定后,不能任意移动,否则需重新进行标定过程。选取参照点,参照点与站址点应大于800m,设立长杆标志,移动长杆,确保其与瞄准镜的中垂线重合,用GPS/北斗定位,记录其经纬度。ARM微处理器根据两点的GPS坐标值,算出参照点到站址点的方位角,作为GPS/北斗跟踪时无人机处在哪个天线单元覆盖范围内的重要依据。
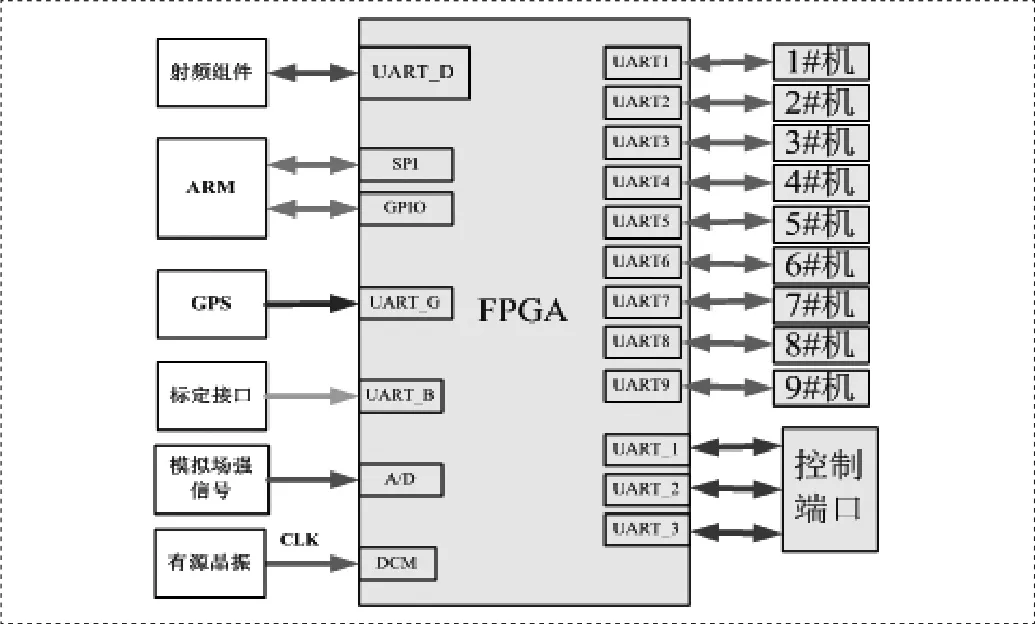
图2 FPGA功能框图
2.3.2 多无人机的实时跟踪控制
无人机起飞后初捕模式下。近场阶段,根据无人机的高度、距离切换到一低仰角的全向天线进行通信;远场阶段,自动在定向天线单元间依次切换进行搜索,确定每架无人机处于哪个定向天线单元覆盖范围之内,记录下对应天线单元编号,之后转入自动跟踪模式。如有无人机未能确定所在方位,将此无人机所对应天线编号统一设为某一定向天线单元,留待自动跟踪模式下,再进行搜索。
3 结论
3.1 仿真结果
ARM通过SPI接口配置1号无人机,波特率为19200(代号:01),ModelSim仿真结果如图4所示。
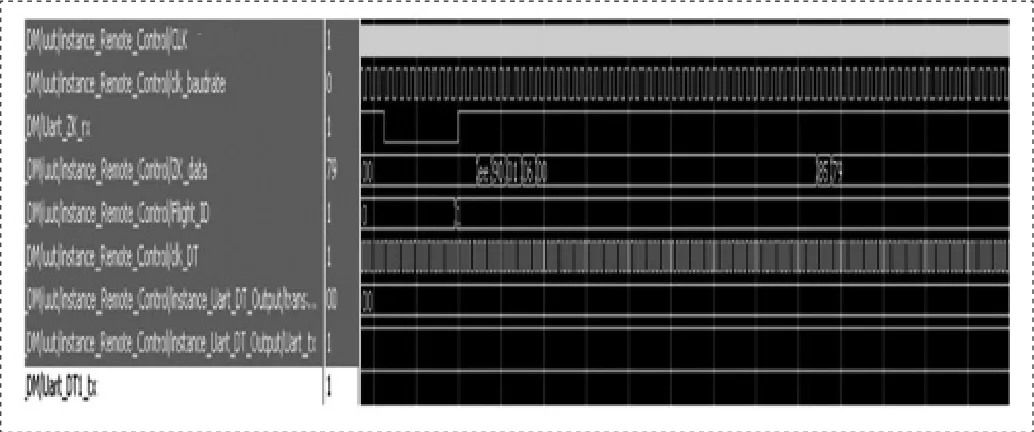
图3 仿真结果图
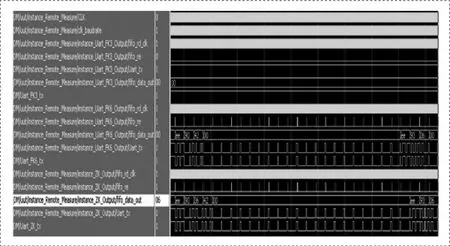
图4 仿真结果图
目前,通过串口调试工具,设立9台飞控计算机与机载设备,同时与测控站互通,通信情况良好,误码率约10-6,且无丢包现象。
通过实际搭载飞行,实测情况下3架无人机同时在线时,通信情况良好。(由于条件所限,实际最大测试无人机数为3架。)
3.2 结论
通过理论模拟试验与实际飞行测试,证实本文提出的一站多机的数据处理方法是可行的。并且在数据通信可靠性方面,也满足通用测控站的要求。
[1]田耘,徐文波,张延伟.无线通信FPGA设计[M].北京:电子工业出版社,2008,02.
[2]杜春雷.ARM体系结构与编程[M].北京:清华大学出版社,2003,02.
[3]田耘,徐文波,杨放.Xilinx FPGA开发使用教程[M].北京:清华大学出版社,2008,11.
[4]黄智伟.FPGA系统设计与实践[M].北京:电子工业出版社,2005,01.
[5]江晓林,杨明极.通信原理[M].哈尔滨:哈尔滨工业大学出版社,2010,03.
[6]于斌.谢龙汉.ModelSim电子系统分析及仿真[M].电子工业出版社,2014,02.