基于分布式无线网络的水质监控系统设计
2017-08-30刘熙明聂思敏
刘熙明, 王 义, 聂思敏
(1 贵州大学大数据与信息工程学院,贵州 贵阳 550025;2 贵州师范大学物理与电子科学学院,贵州 贵阳 550025;3 贵州民族大学机械电子工程学院,贵州 贵阳 550025)
基于分布式无线网络的水质监控系统设计
刘熙明1, 王 义2, 聂思敏3
(1 贵州大学大数据与信息工程学院,贵州 贵阳 550025;2 贵州师范大学物理与电子科学学院,贵州 贵阳 550025;3 贵州民族大学机械电子工程学院,贵州 贵阳 550025)
为提高对水产养殖水质监控的实时性和测量精度,设计了一种基于无线传感器网络的水产养殖水质参数监控系统。该系统由水质参数采集终端、分布式传感器网络、传输控制中心基站、远程在线监控系统组成。参数采集终端采集水质参数并传输到中心基站,再通过GPRS发送给远程在线监控中心,根据用户向监控中心输入的参数实现水温、pH、溶氧(DO)的调节。参数测量过程中引入数字滤波算法提高测量精度,使用经过改进粒子群优化算法(PSO)整定的PID控制器实现水质参数的调节。结果显示:测量精度达到要求,温度、pH和DO的测量误差分别为2.1%、1.3%和3.6%,系统对温度、pH和溶氧调节的最大误差分别为1.9%、2.6%和3.1%。整个系统工作稳定可靠。
水质监测;分布式无线网络;数字滤波算法;改进粒子群优化算法;PID控制
水产养殖自动化和智能化是水产养殖业规模化发展的必然。在水产养殖过程中对养殖水体的温度、pH、溶氧(DO)等参数的精准测量和控制具有重要意义[1-6]。现有的水产养殖水质监测系统主要有单机单参数型水质监测系统、单机多参数型水质监测系统和多参数型在线水质监测系统[7-16]。现有的水质监测系统存在许多不足之处:数据传输稳定性差,传输距离短,综合布线复杂且易受干扰;成本高,不容易做到大范围推广;调控精度不高,对于养殖水体参数调控滞后性大,调节精度低。针对存在的缺陷,本文提出一种水质参数测量控制系统,将分布式无线网络技术和远程控制技术应用到养殖水体水质参数监控系统中。系统主要实现对水质参数的测量和控制,并通过分布式无线网络传输到远程监控系统进行显示,用户可以实时监测水质参数,并根据实际情况对水质参数进行调节。
1 系统结构
为实现水产养殖环境水质参数的测量和调节,考虑到养殖现场环境复杂、控制对象较多,采用分布式无线网络进行通信,所设计的水质监测系统结构如图1所示。
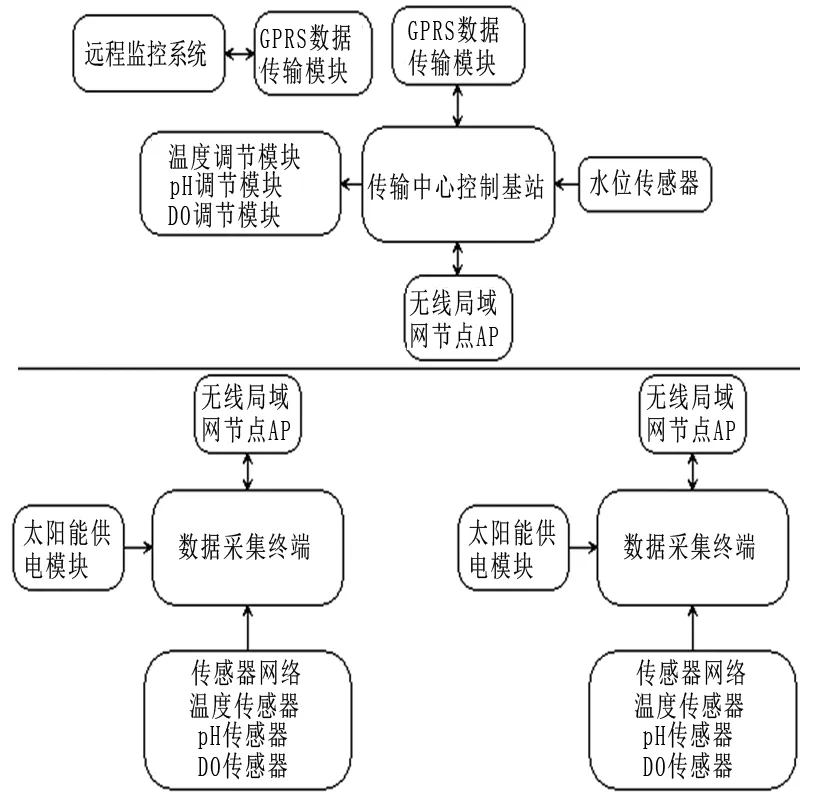
图1 系统结构图
系统由远程在线监控系统、传输控制中心基站和数据采集终端组成。远程在线监控系统可在线显示系统参数、实时监控和设定系统参数;传输控制中心基站主要用于连接远程监控系统和数据采集终端,并执行远程监控系统的命令;数据采集终端主要负责采集水质参数,并把数据发送到传输控制中心基站。
1.1 传输控制中心基站硬件设计
传输控制中心基站的硬件采用STM32F103ZET6作为主控制器,与远程监控系统的连接使用GPRS网络,与数据采集终端的连接使用NRF24L01无线数据收发模块(图2)。为了增加NRF24L01的发射距离,在模块上增加了一个高增益的PA。

图2 传输控制中心基站和数据采集终端硬件电路框图
1.2 数据采集终端硬件设计
数据采集终端负责采集水质参数,并发送到传输控制中心基站。采用STM32F103C8T6作为主控制器,终端搭载温度传感器、DO传感器以及pH传感器。数据传输使用NRF24L01无线收发模块实现。终端采用太阳能电池板和锂电池组合方式供电,白天以太阳能电池为系统供电、为锂电池充电,夜间使用锂电池供电。
2 智能控制器设计
水质监控系统的核心功能是实现水质的监测和控制。用户根据鱼类在不同生长阶段对水质参数的不同要求,结合实际情况调控水质参数,使水质达到最适合生长状态。使用经过改进粒子群优化算法整定参数的PID控制器实现对水质参数的精确调节。系统采集各项水质参数,再与用户预设定的参数相比较,决定是否需要调节。水质参数的采集引入数字滤波算法,消除采样干扰,图3为智能控制器结构。

图3 智能控制器结构
2.1 数据采集滤波算法设计
由于水产养殖环境工况复杂,温度、pH、DO的测量和数据传输容易受到各种干扰,供电不稳定、频率扰动等也会影响到控制系统的精度和可靠性,造成后续调节控制不准确。为了保证系统稳定工作,提高系统调节精度和可靠性,在数据采集过程中加入滤波算法。考虑到温度、pH、DO等参数在测量过程中变化比较缓慢,使用限幅滤波和固定窗长滑动均值滤波算法来消除干扰[17]。
限幅滤波算法的数学表达式为:
(1)
式中:X(K)—第K次取值,Y(K)—第K次系统测量值,Y(K-1)—第K-1次系统测量值,A—2次测量值的差。
在实际应用过程中,限幅滤波器的性能决定因素是经验差值A的取值范围,A的值可根据观测经验和实际测量分析得到。
滑动均值滤波算法的流程如下[17]:首先定义长度为n的序列,把连续的n次采样值装入所定义的序列中,序列N的值为N={a1,a2,…,an},对该序列中的n个数据进行平均可得到第K次滤波值C(k)。
(2)
丢弃an,把a1到an-1依次向高位移动一位,把下一次传感器转换的数值放入到a1中,得到新的序列,再对表中数据求一次平均值,得到第K+1次滤波值C(k+1)。
以温度传感器数据采集为例。测试时水中温度24 ℃,未加滤波器时和加上数字滤波器之后,传感器采集到的温度经过滤波处理后的输出波形如图4所示。可以看出,未使用滤波器所采集到的温度数据干扰比较大,而加上滤波器之后结果基本无干扰,实验结果证明所设计数字滤波器效果优良。

图4 加上数字滤波器温度测量输出曲线
2.2 改进粒子群算法的PID控制器
控制系统需要实现对水温、pH、DO的调节和控制,系统使用PID控制器对各项水质参数进行调节控制,并使用改进粒子群算法对PID的3个参数KP、KI、KD进行在线优化和控制,以提高控制器的性能和鲁棒性[18-23]。
粒子群优化算法(PSO)的数学形式如下:
Vi=ω×Vi+C1×Rand(0,1)×(Pbesti-Xi)+C2×Rand(0,1)×(Gbesti-Xi)
(3)
Xi=Xi+Vi
(4)
式中:ω—惯性因子;Vi—例子速度;Pbesti为当前的最佳位置,Gbesti为目标最佳位置,同样也是Pbest中的最优值,Rand(0,1)为介于(0,1)之间的随机数,C1、C2为学习因子。
PSO通过Pbest和Gbest这两个参数进行进化。为了防止PSO进入局部极小化,提高粒子在其他位置的搜索能力,对标准PSO算法做出改进,首先定义一个随机变量δ属于高斯分布(0,1),在算法后期对参数Gbest重新计算。
Gbesti=Gbesti×(0.5δ+1)
(5)
定义一个二次随机搜索因子ε,当粒子优化的新位置不如当前位置时,将从原位置展开二次寻优,式(4)变为:
Xi+1=Xi+ε×Vi+1
(6)
其中,
ε=Rand(0,1)+0.5
(7)
(8)
式中:e(t)—系统偏差量,e(t)=r(t)-c(t);Kp—比例系数;TI—积分时间常数;TD—微分时间常数。
使用改进PSO算法对PID控制器中的KP、KI、KD进行在线整定。为检验改进PSO算法对PID参数的整定效果,在MATLAB中利用simulink建立温度调节仿真模型,进行仿真实验。从仿真结果(图5)可以看出,通过改进PSO进行参数整定的PID控制器响应速度和控制精度均优于传统PID控制器,具有更好的鲁棒性。
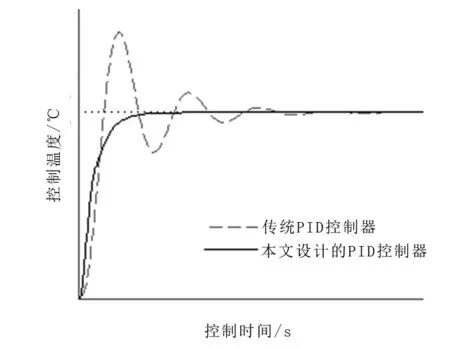
图5 改进PSO-PID控制器仿真曲线图
3 软件设计
3.1 传输控制中心基站程序设计
传输控制中心基站负责把数据采集终端的数据发送给远程监控系统,同时根据远程监控系统发送的指令调节水温、DO、pH(图6)。中心基站上电之后,初始化各硬件端口,然后先与远程监控系统握手连接。为保证系统的安全性,系统传输控制中心基站与远程监控系统的握手连接只能由传输控制中心基站发起,其连接流程为:用户向远程监控系统输入传输控制中心基站的唯一识别代码,等待中心基站发送自身的唯一识别代码,并把两者进行匹配,匹配正确则建立连接,否则连接失败;接上远程监控系统后,中心基站开始传输数据。

图6 传输控制中心基站软件流程图和握手连接流程图
3.2 无线数据传输机制设置
为了保证数据传输的有效性和可靠性,需要在数据采集终端和传输控制中心之间建立有效的数据收发机制,便于传输控制中心基站和远程监控终端识别出数据由哪一个采集终端发出,便于维护过程中准确的找到故障硬件。为了实现这个功能,在预先编程的时候按照规则为每一块无线收发模块分配一个标签地址,每发送一次数据就传输一次标签地址,传输控制中心基站和远程监控系统通过对接收到的数据进行解码,即可识别出发送端的标签地址。
3.3 远程在线监控系统功能实现
远程在线监控系统使用美国国家仪器(National Instrument,NI)的LabView图形化编程语言编写,用于水产养殖环境水质参数的显示、存储,用户通过监控系统查询当前、历史数据,并设定目标水质参数。远程在线监控系统由人机交互界面(UI)、通信模块和数据库(DB)组成。UI的功能是为用户提供人机交互接口,通信模块负责数据的收发,而DB用于存储采集到的历史参数。为了保存监测数据,需要为系统设计数据库。NI为LabView提供了一个专门和数据库连接的工具包:数据库连接(Database Connectivity),利用该工具包实现LabView和数据库之间的连接。在数据库中建立温度表、pH表、溶氧浓度表,用于保存相关数据。
4 试验与结果
为了测试所设计系统的可靠性和稳定性,选择贵阳市花溪区的一处鱼塘作为试验场进行测试。鱼塘面积200 m2,水深0.6~0.8 m;传输控制中心基站1台,标签地址为0X01;数据采集终端12个,标签地址从0X02到0X13。实际测试表明,分布式网络覆盖半径为650 m,传输控制中心基站到远程监控中心的距离为800 m。
4.1 水质参数测量
为测试所设计系统水质参数测量的准确性,利用标准仪器与所设计的系统对同一水体同时测量相关参数,并把两种测量结果进行对比。测试结果表明:实际温度23.5 ℃,测量值23.8 ℃;实际pH 7.2,测量值7.2;实际溶氧8.3 mg/L时,测量值8.2 mg/L。对温度、pH和溶氧的最大测量误差分别为2.1%、1.3%和3.6%。
4.2 温度、DO和pH控制功能测试
不同生长阶段的鱼类对水温、pH以及DO的要求不同,因此需要针对不同生长阶段调节各项水质参数。实际生产中对各项参数的调节措施如下:(1)水温调节,一个蓄水池中装有温度比较高的水,而自来水水温比较低,当养殖水温较低时打开蓄水池闸阀,放入温度较高的水来升高水温,当养殖水温较高时则放入自来水以降低养殖水温。当控制方法不变时,温度调节速度与鱼塘规模有关。(2)DO调节[24],在池中分布一定数量的增氧泵,当溶氧过低时,打开增氧泵向养殖水体中通入空气,以此增加溶氧。(3)pH调节,当pH<6时,向池水中加入一定量的石灰水(氢氧化钙溶液)进行中和,若pH>9,则向鱼塘中通入清水和醋酸溶液来降低pH。为验证调节方法的可行性和系统的调节精度,分别就温度、pH以及溶氧浓度分别进行3次测试。测试结果见表1,测试结果分析可知,系统能够实现对温度、pH和溶氧的调节,其调节的最大误差分别为1.9%、2.6%和3.1%。调节速度、调节精度能够满足实际生产养殖的需求。
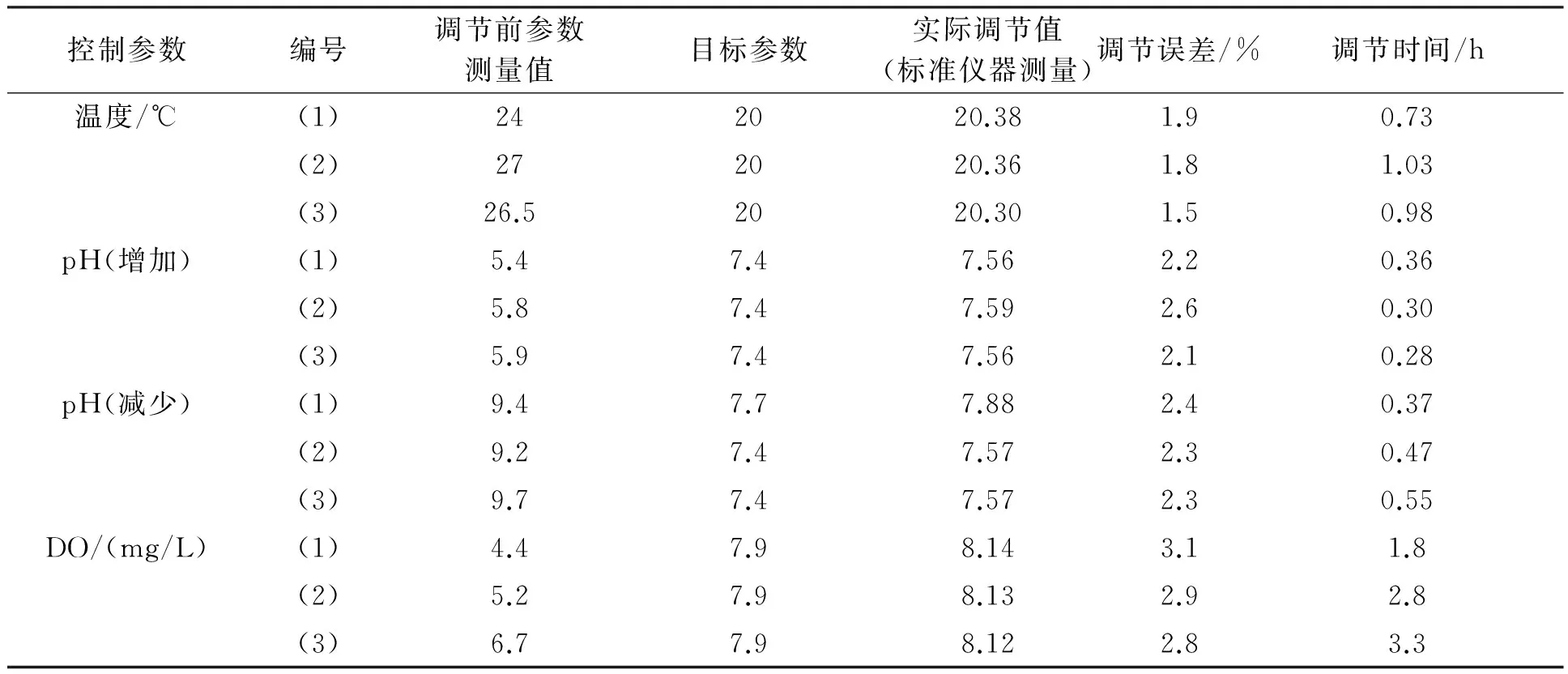
表1 水质参数调节测试表
4.3 结果分析
通过对标准仪器测量结果和所设计系统测量结果对照分析可知,两者之间的误差很小,测量精度满足水产养殖的使用需求。对分布式局域网数据传输稳定性测试时发现,让数据采集终端连续工作72 h,数据传输稳定,但有一个采集终端出现故障,经查是由于受潮机壳内部积水导致电路所致,故障排除后连续测试15 d,数据传输正常,工作稳定。对水质参数调整结果分析表明,系统能够实现对各项水质参数的调节和控制,调节速度比人工调节方式快,调节精度更高,控制系统的稳定性、精度、速度都优于传统的调节方式。
5 结论
将分布式无线网络和LabView上位机应用到水产养殖环境监测系统中,实现了对水产养殖水体水质参数的实时监测和调节;将智能控制算法运用到水质监测系统中取得了良好的控制效果;数据采集采用数字滤波算法,可有效消除干扰,提高系统的可靠性和抗干扰能力。结合粒子群优化PID算法实现溶氧、pH和水温的调节,在保证调控精度的同时加快了系统调节速度,增强了系统动态调节能力。试验结果表明,系统可以可靠稳定地采集各项水质参数,并通过远程在线监控系统实时显示和控制,系统运行稳定可靠,易于维护,能够广泛用于水产养殖现场。
□
[1] 徐大明,周超,孙传恒,等.基于粒子群优化BP神经网络的水产养殖水温及pH预测模型[J].渔业现代化,2016,43(1):24-29.
[2] 刘星桥,骆波,朱成云.基于物联网和GIS的水产养殖测控系统平台设计[J].渔业现代化,2016,42(6):16-20.
[3] 王鸿雁,孟祥印,赵阳,等.基于ARM9及Android的水产养殖监控系统设计[J].渔业现代化,2016,43(4):11-15.
[4] 秦琳琳,马国旗,储著东,等.基于灰色预测模型的温室温湿度系统建模与控制[J].农业工程学报,2016,32(S1):233-241.
[5] 陈俐均,杜尚丰,李嘉鹏,等.温室环境温度预测自适应机理模型参数在线识别方法[J].农业工程学报,2017,33(S1):315-321.
[6] 刘星桥,陈海磊,朱成云.基于GPS的自学习导航游弋式水质监测系统设计[J].农业工程学报,2016,32(1):84-90.
[7] 张静秋,陈爱文.基于ZigBee的鱼塘水质监测系统设计[J].江苏科技信息,2017(7):57-58.
[8] 高翔.面向水产养殖的小型移动式水质监测系统设计[D].合肥:中国科学技术大学, 2016.
[9] 张国杰.基于STM32的水产养殖水质监测与预测预警系统的设计与实现[D].杭州:杭州电子科技大学, 2016.
[10] 贾子赫,翟会,张旭东,等.多参数水质检测系统: CN205720196U[P]. 2016-03-07.
[11] 顾明,赵守晶,解伟,等.一种集成式智能微量多参数在线水质检测仪:CN105823743A[P]. 2016-03-22.
[12] BARTRAM J. Water quality monitoring; A practical guide to the design and implementation of fresh water quality studies and monitoring programs[J]. Trans Faraday Soc,1996,66(2):537-545.
[13] 许海海,崔新忠,兰爱玉,等.养殖水质参数在线采集系统设计[J].黑龙江科技信息, 2016(34):23-24.
[14] ORTIZ F, CRUZ R, CORREA R. Online temperature measurement of a sample inside of a microwave cavity[M]. Chicago :The measurement of attitude The University of Chicago Press, 1929:123-133.
[15] DAVIDSON W S. Water quality monitoring[C]. Conference Record. IEEE, 1994:478-480.
[16] SMITH R A, SCHWARZ G E, ALEXANDER R B. Regional interpretation of water-quality monitoring data[J]. Water Resources Research, 1997, 33(12):2781-2798.
[17] 李丽华.蛋鸡体温与生产性能参数动态监测关键技术研究及应用[D].河北:河北农业大学, 2014.
[18] 汪新星,张明.利用改进微粒群算法优化PID参数[J].自动化仪表, 2004(2):21-24.
[19] 郑立新,周凯汀,王永初. PID进化设计法[J] .仪器仪表学报, 2001, 22(4):340-343.
[20] 曹成涛,许伦辉.基于形态学小波变换的数字滤波算法[J].电子技术应用, 2017, 43(1):125-128.
[21] LIU B, WANG L, JIN Y, et al. An Effective PSO-Based Memetic Algorithm for TSP[J]. Lecture Notes in Control & Information Sciences, 2006, 345:1151-1156.
[22] AGRAWAL R K, BAWANE N G. Multiobjective PSO based adaption of neural network topology for pixel classification in satellite imagery[J]. Applied Soft Computing, 2015, 28:217-225.
[23] SHI X H, LIANG Y C, LEE H P, et al. An improved GA and a novel PSO-GA-based hybrid algorithm[J]. Information Processing Letters, 2005, 93(5):255-261.
[24] 高凤强,颜逾越,康恺,等.基于GSM的对虾养殖场增氧机监控系统设计[J].渔业现代化, 2016, 43(1):13-17.
Design of water quality monitoring system based on distributed wireless network
LIU Ximing1, WANG Yi2, NIE Simin3
(1 College of Big Data and Information Engineering, Guizhou University, Guiyang Guizhou 550025, China;2 College of Physics & Electronic science, Guizhou Normal University, Guiyang Guizhou 550025, China;3 College of Mechanical and Electronic Engineering, Guizhou Minzu University, Guiyang Guizhou 550025, China)
In order to improve the timeliness and measurement precision of water quality monitoring in aquaculture, a water quality parameter monitoring system based on wireless sensor network is designed. The system is made up of water quality parameter acquisition terminal, distributed sensor network, transmission control center base station and remote online monitoring system. The parameter acquisition terminal acquires water quality parameters and transmits them to the center base station, and then sends them to the remote online monitoring center via GPRA to realize adjustment of water temperature, pH and dissolved oxygen (DO) according to the parameters input by the user to the monitoring center. The digital filtering algorithm is introduced during parameter measurement to improve measurement precision, and PID controller set by improved particle swarm optimization (PSO) is used to adjust the water quality parameters. The results show that the measurement precision is up to standard, the measurement error of temperature, pH and DO is 2.1%, 1.3% and 3.6% respectively, and the maximum error of the system to temperature, pH and DO is 1.9%, 2.6% and 3.1% respectively. The system operation is stable and reliable.
water quality monitoring; distributed wireless network; digital filtering algorithm; improved particle swarm optimization algorithm; PID controller
10.3969/j.issn.1007-9580.2017.04.008
2017-04-05
国家自然科学基金项目(61462015);贵州省科技厅国际科技合作计划项目(黔科合外G字[2014]7007号)
刘熙明(1993—),男,硕士研究生,研究方向:自动化控制和嵌入式系统。E-mail:472148691@qq.com
王义(1970—),男,博士,教授,研究方向:自动化控制和嵌入式系统。E-mail:wyigz@126.com
S 968.31+5
A
1007-9580(2017)04-050-07
