基于一阶低通滤波器滑模反步法的直流电机位置控制
2017-08-16奚文龙唐文秀许李尚刘方悦
奚文龙,唐文秀,许李尚,刘方悦
(东北林业大学 机电工程学院,哈尔滨 150040)

基于一阶低通滤波器滑模反步法的直流电机位置控制
奚文龙,唐文秀,许李尚,刘方悦
(东北林业大学 机电工程学院,哈尔滨 150040)
针对直流电机位置控制系统在负载扰动情况下存在控制精度低、响应速度慢和鲁棒性差的问题,提出了基于一阶低通滤波器滑模反步法的直流电机位置跟踪控制算法。通过滑模反步法进行虚拟控制实现直流电机实际位置控制。利用一阶低通滤波器计算虚拟控制项的导数,消除微分膨胀,使控制器设计简单,但同时造成了相位滞后。通过前馈环节对一阶低通滤波器造成的相位滞后进行补偿。考虑位置跟踪、虚拟控制和滤波误差设计线性动态滑模面,改进滑模变结构控制律的切换控制项,提高滑模趋近速度,同时降低系统输出抖振。定义了Lyapunov函数,证明系统稳定性。仿真实验对比了比例积分微分(proportion integration differentid,PID)控制和传统滑模控制算法,结果表明,该方法能够快速、准确地跟踪给定位置信号,同时具有较好的鲁棒性。
一阶低通滤波器;滑模变结构;反步法;直流电机;位置控制
0 引 言
直流电机具有力矩系数大、过载能力强、可靠性高等优点[1],良好的机械性能和调速性能使其广泛应用于工业和制造业领域[2],但内部参数时变、非线性使得进行位置伺服控制设计较为复杂[3]。
滑模变结构算法进行位置控制具有较强的鲁棒性,但存在控制精度不够高、输出抖振等问题[4]。为满足位置控制精度和鲁棒性的要求,国内外学者进行大量研究。文献[5]设计了基于非奇异终端滑模的负载观测器,并将观测值动态补偿到电机控制中;文献[6]提出自适应增益调度算法,在增益调度中采用误差主导增益变化率,确保增益的实时性,进行位置伺服系统设计;文献[7]提出基于超螺旋滑模轮廓控制与二次型最优化位置控制结合的控制策略,用于直流电机高精度位置控制;文献[8]针对电机参数时变,设计自适应律对匹配不确定性进行在线估计,进而设计电流控制器;文献[9]将模糊神经网络智能算法用于整定滑模控制器参数,逼近直流电机未建模部分。但目前仍存在控制器设计复杂,系统实时性较差和控制精度与系统鲁棒性不可兼得等缺点。
本文提出的基于一阶低通滤波器滑模反步法的位置跟踪控制算法,在系统扰动未知情况下,通过一阶低通滤波器计算虚拟控制项导数,并对此造成的相位滞后进行补偿;通过滑模反步法设计控制器,定义线性动态滑模面和对控制切换项的改进能够很大程度减小系统输出抖振,加快系统响应速度,提高控制精度。
1 直流电机数学模型
直流电机数学模型可以用电机的电枢电压平衡方程(不考虑电枢电流发生变化时电枢回路产生电抗压降)、输出转矩平衡方程和电磁转矩方程来描述[10]
u=Ri+ue=Ri+ceφn=Ri+keω
(1)
(1)式中:u为电枢两端电压;R为电枢回路总电阻;i为电枢回路电流;ue为感应电动势;φ为磁通;ce,ke为反电动势系数;n为转子速度;ω为转子角速度。
(2)
(2)式中:Te为电磁转矩;TL为负载转矩;Tr为各种干扰转矩总和;B为阻尼系数;J为电机输出轴的转动惯量。
Te=kTi
(3)
(3)式中,kT为电磁转矩系数。
(4)
令x1表示电机转子角位移;x2表示电机转子角速度,则电机运行的状态方程为
(5)
2 一阶低通滤波器滑模反步法
2.1 一阶低通滤波器
当τ很小时,可以将e-τs进行一阶泰勒级数展开,略去高次项得

(6)
由(6)式可知,一阶低通滤波器存在相位滞后,需要进行相位补偿,补偿后的滤波器动态结构如图1所示。

图1 补偿后的一阶低通滤波器Fig.1 Compensated one-order low pass filter
由图1和(6)式可得补偿后的低通滤波器传递函数为
(7)
2.2 控制律设计
直流电机位置跟踪伺服系统扰动主要为负载受到未知干扰转矩影响。


假设位置跟踪指令为xd。
Step 1 定义位置跟踪误差为
(8)

Step 2 定义
(9)
定义Lyapunov函数
(10)
则
(11)
(12)
满足
(13)

Step 4 设计线性动态滑模面s=e2。
Step 5 考虑位置跟踪、虚拟控制和滤波误差,定义Lyapunov函数
(14)
则
(15)
Step 6 设计滑模控制律由等效控制项和切换控制项组成[11],即
(16)
(17)
(18)
(17)~(18)式中:sgn()为符号函数;c2为大于0的常数;η为大于|R(x,t)|的常数。
(19)
用改进的饱和函数sat(s)代替符号函数sgn(s),δ为边界层厚度[12]。采用sat(s)代替sgn(s),优势在于在边界层外进行切换控制,通过指数计算使系统快速趋近于滑模面,在边界层内进行反馈控制,降低滑动模态切换时产生的抖振[13]。
2.3 控制系统稳定性分析
(20)
则此时K有界,记为N即N≥|K|。
设L=e2(-ηsgn(e2)+R(x,t)),当e2≥0时,L=-ηe2+R(x,t)e2;当e2<0时,L=ηe2+R(x,t)e2,由于η≥|R(x,t)|,则一直满足L≤0。
将(16)式代入(15)式得

(21)

则
(22)


(23)
(23)式中,α为任意常数。
(24)
则
(25)
(25)式中,V(t)渐进收敛,即位置跟踪伺服系统的跟踪误差收敛,收敛精度取决于r。
通过合理选择c1,c2,τ,η,r参数能够保证系统的稳定性和控制精度。
3 位置控制系统仿真实验
为了检验设计控制器的性能,用simulink进行仿真实验,仿真实验的电机参数如表1所示,滑模变结构控制器参数如表2所示,仿真模型如图2所示,对比组采用传统滑模控制和比例积分微分(proportion integration differential,PID)控制,控制器参数为P=13,I=30,D=6。

表1 电机参数Tab.1 Motor parameters

表2 控制器参数Tab.2 Controller parameters
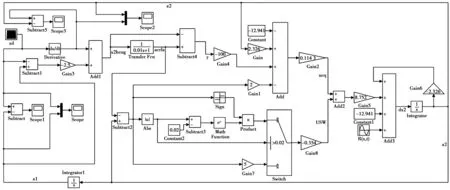
图2 Simulink仿真模型Fig.2 Simulation model
对正弦信号进行位置跟踪,取位置给定信号xd=50 sint,电机负载加入随机扰动,随机扰动值[-20,20],仿真结果如图3所示。本文算法在给定位置信号到达峰值时,跟踪超调0.6%,系统稳定后,位置跟踪相对误差0.4%,位置跟踪存在0.01 s相位滞后,在0.2 s内完全跟踪给定速度信号,系统稳定后,速度跟踪相对误差0.3%。PID算法在给定位置信号到达峰值时,跟踪超调1.9%,系统稳定后,位置跟踪相对误差1.2%,位置跟踪存在0.01 s相位滞后,在1.6 s内完全跟踪给定速度信号,系统稳定后,速度跟踪相对误差1%。传统滑模算法在给定位置信号到达峰值时,跟踪超调0.8%,系统稳定后,存在较大抖动,位置跟踪相对误差2.3%,位置跟踪存在0.01 s相位滞后,在0.5 s内完全跟踪给定速度信号,系统存在抖振。
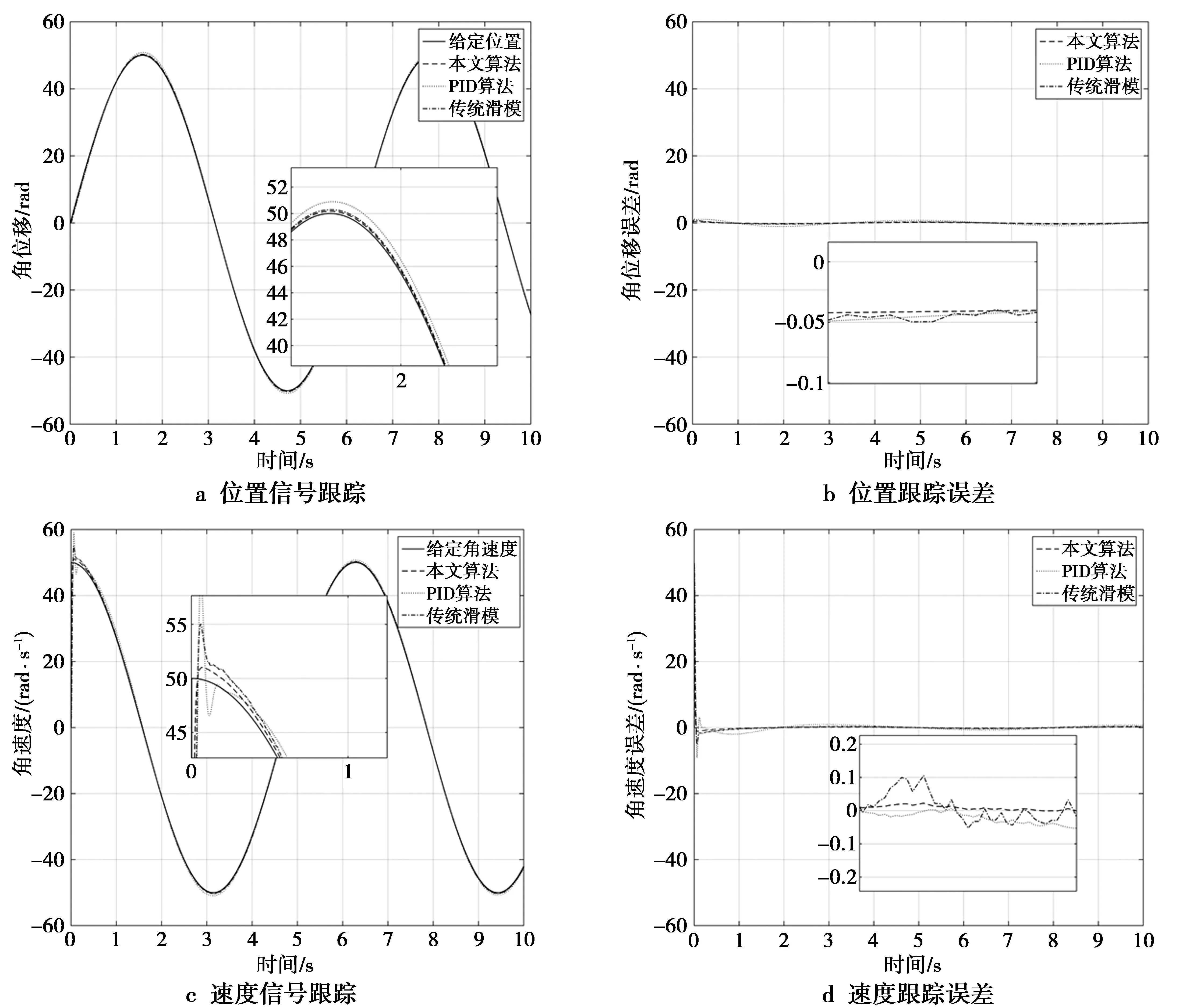
图3 正弦信号跟踪仿真Fig.3 Sine signal tracking simulation
对固定位置信号进行跟踪,取位置信号为固定值xd=50,电机负载加入随机扰动,随机扰动值[-20,20],仿真结果如图4所示。本文算法在2 s内完全跟踪给定信号,系统输出无超调量,系统稳定后,稳态误差0.002 5rad。PID算法在2 s内完全跟踪给定信号,系统输出存在较大超调量,系统稳定后,稳态误差0.005 rad。传统滑模算法在2.5 s内完全跟踪给定信号,系统存在抖振。
对三角波信号进行位置跟踪,电机负载加入随机扰动,随机扰动值[-20,20],仿真结果如图5所示。本文算法位置跟踪存在0.005 s相位滞后,给定位置信号斜率突变时超调0.4%,系统稳定后,稳态误差0.9%。PID算法位置跟踪存在0.013 s相位滞后,给定位置信号斜率突变时超调2%,系统稳定后,稳态误差2.6%。传统滑模算法位置跟踪存在0.009 s相位滞后,给定位置信号突变时超调1%,系统稳定后,稳态误差1.5%。本文算法速度跟踪,在速度信号突变时超调2%,系统稳定后,稳态误差0.7%。PID算法速度跟踪,在速度信号突变时超调19%,系统稳定后,稳态误差4%。传统滑模算法速度跟踪,在速度信号突变时超调8%,系统稳定后,稳态误差1.2%。

图4 固定位置信号跟踪仿真Fig.4 Fixed position signal tracking simulation
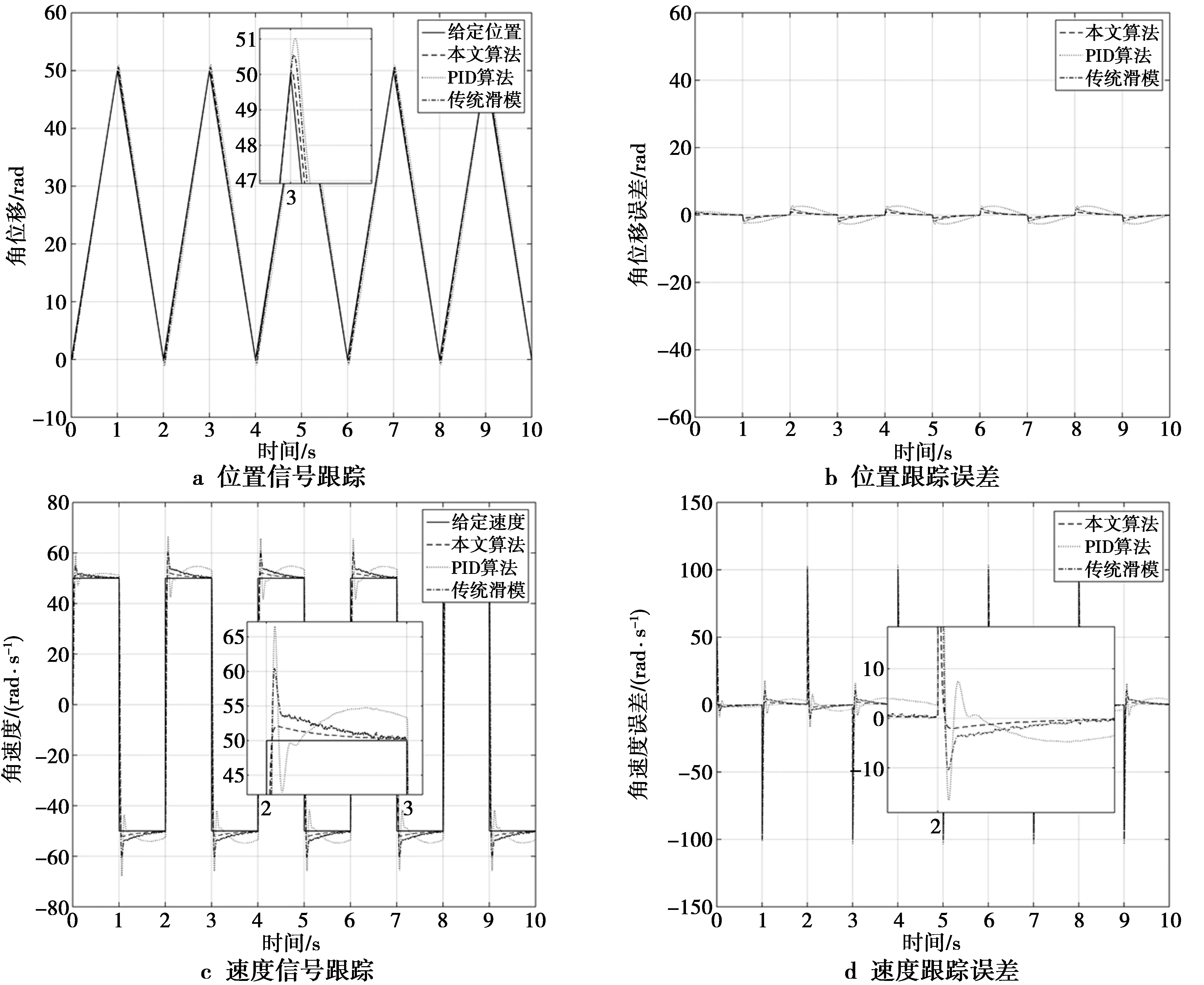
图5 三角波信号跟踪仿真Fig.5 Triangular wave signal tracking simulation
进行直流电机位置控制,与PID算法和传统滑模相比,本文算法在位置信号突变时具有较小的超调量,系统稳定后跟踪误差较小,控制精度较高,在持续加入变化扰动时,仍具有较好跟踪性能,具有较好的鲁棒性。
4 结 论
针对直流电机位置控制系统存在负载扰动问题,提出了一种一阶低通滤波器滑模反步控制算法。通过一阶低通滤波器计算虚拟控制项导数,并对由此造成的相位滞后进行补偿。通过滑模反步法进行虚拟控制实现实际位置控制,结合线性动态滑模面和改进控制切换项的方法降低系统的抖振,减小稳态误差。仿真实验结果表明,该方法能够有效跟踪各类给定位置信号,响应速度较快,跟踪精度较高,同时对外加不确定的负载扰动和系统参数变化不敏感,具有较强的鲁棒性。
[1] 温嘉斌,麻宸伟.无刷直流电机模糊PI控制系统设计[J].电机与控制学报,2016, 20(3):102-108. WEN Jiabin, MA Chenwei. Design of fuzzy PI control system for brushless DC motor[J]. Electric Machines and Control,2016, 20(3):102-108.
[2] SILVA-ORTIGOZA R,HERNANDEZ-GUZMAN V M.DC/DC Buck Power Converter as a Smooth Starter for a DC Motor Based on a Hierarchical Control[J].IEEE Transactions on Power Electronics,2015,30(2):1076-1084.[3] 张庆超,马瑞卿.无刷直流电机转速伺服系统反步高阶滑模控制[J].控制与决策,2016,31(6):961-968. ZHANG Qingchao, MA Ruiqing. Backstepping high order sliding mode control for brushless DC motor speed servo control system[J]. Control and Decision, 2016, 31(6):961-968.
[4] AURORA C, FERRARA A, FOSCOLO M. A globally stable adaptive second order sliding mode control scheme for sensorless current-fed induction motors[J]. Control Conference, 2015, 26(36):4669-4675.
[5] 方一鸣,李智,吴洋羊,等.基于终端滑模负载观测器的永磁同步电机位置系统反步控制[J].电机与控制学报,2014,18(9):105-111. FANG Yiming, LI Zhi, WU Yangyang, et al. Backstepping control of PMSM position systems based on terminal-sliding-mode load observer[J]. Electric Machines and Control. 2014,18(9):105-111.
[6] 杨艺,秦世引.高精度位置跟踪自适应增益调度滑模控制算法[J].北京航空航天大学学报,2017,43(1):7-17. YANG Yi, QIN Shiyin. Sliding mode control algorithm with high-precision position tracking based on adaptive gain schedule[J]. Journal of Beijing University of Aeronautics and Astronautics,2017,43(1):7-17.
[7] 武志涛,朱连成.基于滑模轮廓控制器的直线电机精密运动平台轨迹跟踪控制[J].中国电机工程学报,2015,23(35):6188-6192. WU Zhitao, ZHU Liancheng. Trajectory Tracking Control for the Motion Table Driven by Linear Motors Based on Sliding Mode Contour Tracking Controllers[J]. Proceedings of the CSEE, 2015,23(35):6188-6192.
[8] 李兵强,陈晓雷,林辉,等.机电伺服系统高精度自适应反推滑模控制[J].吉林大学学报:工学版,2016,46(6):2003-2009. LI Bingqiang,CHEN Xiaolei,LIN Hui,et al.High precision adaptive backstepping sliding mode control for electromechanical servo system[J].Journal of Jilin University:Engineering and Technology Edition,2016,46(6):2003-2009.
[9] MASUMPOOR S, YAGHOBI H, KHANESAR M A. Adaptive sliding-mode type-2 neuro-fuzzy control of an induction motor [J]. Expert Systems with Applications, 2015, 42(19): 6635-6647.
[10] SWAMY C L P,SINGH B,SINGH B P.Fuzzy Based Sliding Mode Control of Permanent Magnet Brushless DC Motor[J].Iete Journal of Research,2015,41(4):245-252.
[11] 赵希梅,赵久威.永磁直线同步电机的互补滑模结构控制[J].中国电机工程学报,2015,35(10):2552-2557. ZHAO Ximei, ZHAO Jiuwei. Complementary Sliding Mode Variable Structure Control for Permanent Magnet Linear Synchronous Motor[J]. Proceedings of the CSEE, 2015,35(10):2552-2557.
[12] 陈增强,王辰璐,李毅,等.基于积分滑模的四旋翼飞行器控制系统设计[J].系统仿真学报,2015,27(9):2181-2186.CHEN Zengqiang,WANG Chenlu,LI Yi,et al.Control System Design Based on Integral Sliding Mode Quadrotor[J].Journal of System Simulation,2015,27(9):2181-2186.
[13] 王长青,韦汉林,李爱军,等.空间系绳系统展开的滑模变结构控制[J].控制理论与应用, 2016, 33(1):70-76. WANG Changqing, WEI Hanlin, LI Aijun, et al. Sliding mode variable structure control for the deployment of tethered satellite system[J]. Control Theory & Applications, 2016, 33(1):70-76.
[14] 刘金琨.滑模变结构控制MATLAB仿真基本理论与设计方法[M].3版.北京:清华大学出版社,2015. LIU Jinkun. Sliding mode control design and MATLAB simulation: the basic theory and design method[M]. 3rd. Beijing: Tsinghua University Press,2015.
(编辑:刘 勇)
s:The Natural Science Foundation of China(51575097);The Heilongjiang Natural Science Foundation(E201403)
The position control system of DC-motor has low control precision,low respond speed and poor robustness when the load disturbance occurs. In order to solve the problems, a position control method based on one-order low pass filter backstepping sliding mode is proposed. Real position control is realized by virtual control in the sliding mode backstepping method. The derivative of virtual control item is calculated by one-order low pass filter which removes differential expansion and makes it simple to design the controller. The phase lag caused by one-order low pass filter is compensated by feedforward. According to position trailing, virtual control and filtering error, linear dynamic surface is designed and the switching control item is improved to quicken the approach velocity and reduce chattering. The stability of the system is demonstrated by Lyapunov stability theory. Compared to PID control and traditional sliding mode control, the simulation result shows that the method has good robustness and can track the position signal quickly and accurately.
DC-motor; one-order low pass filter; backstepping; sliding mode variable structure; position control
2017-01-18
2017-05-27 通讯作者:奚文龙 xiwenlongyouxiang@163.com
国家自然科学基金(51575097);黑龙江省自然科学基金(E201403)
10.3979/j.issn.1673-825X.2017.04.019
TP273
A
1673-825X(2017)04-0550-07
Position control of DC-motor based on one-order lowpass filter backstepping sliding mode method
(College of Mechanical and Electrical Engineering, Northeast Forestry University, Harbin 150040, P.R. China)

奚文龙(1992-),男,辽宁沈阳人,硕士生,主要研究方向为智能控制。E-mail:xiwenlongyouxiang@163.com。

唐文秀(1964-),女,黑龙江哈尔滨人,教授,博士,硕士生导师,主要研究方向为智能控制。E-mail:751664822@qq.com。

许李尚(1993-),男,河南郑州人,硕士生,主要研究方向为机电一体化。
刘方悦(1990-),男,黑龙江哈尔滨人,硕士生,主要研究方向为智能传感器。
XI Wenlong, TANG Wenxiu, XV Lishang, LIU Fangyue