一种基于模态域波束形成的水平阵被动目标深度估计∗
2017-08-12李鹏章新华付留芳曾祥旭
李鹏 章新华 付留芳 曾祥旭
1)(哈尔滨工程大学水声工程学院,哈尔滨150001)2)(哈尔滨工程大学水声技术重点实验室,哈尔滨150001)3)(海军大连舰艇学院军事海洋系,大连116018)
一种基于模态域波束形成的水平阵被动目标深度估计∗
李鹏1)2)†章新华1)3)付留芳3)曾祥旭3)
1)(哈尔滨工程大学水声工程学院,哈尔滨150001)2)(哈尔滨工程大学水声技术重点实验室,哈尔滨150001)3)(海军大连舰艇学院军事海洋系,大连116018)
(2016年6月27日收到;2017年1月16日收到修改稿)
水面水下目标分辨与识别一直是被动声呐探测领域的难题.利用一种水平阵模态域波束形成算法获得已知方位目标声源的各阶模态强度,将其与不同深度的各阶参考模态强度进行匹配,最终实现了对声源的深度估计.仿真结果表明,该算法可以在信噪比为−10 dB的情况下,用300 Hz带宽的信号样本,实现对声源深度的有效估计.系统分析了不同参数和不同波导条件对该方法目标深度估计性能的影响.其中,阵元数越多,模态样本数越多,计算频段越宽,方位估计精度越高,有效阵长越长,深度估计的性能越好.阵元间距和波导深度的变化不会影响该方法的深度估计性能,并且该方法的深度估计性能在声速剖面、海底参数等波导条件存在扰动时具有鲁棒性.
简正波,模态域波束形成,目标深度估计
1 引言
浅海海域环境复杂,海面目标多,干扰强度大,干扰覆盖范围广,严重影响了对水下弱目标的远程预警探测.一方面,水面多目标的存在影响声呐对水下目标的检测;另一方面,即使检测到水下目标,如何从检测到的目标中判别哪个是水下目标,已成为声呐探测的难题.声呐目标判型识别,通常依靠声呐员根据听音特征和时频图像来完成.水面多目标的存在特别是邻近多目标的存在,会造成声音混杂、特征混乱、识别困难.目前,仅仅依赖信号时频特征进行目标识别的方法严重受限,难以满足使用需求,迫切需要寻求新的途径加以解决.从接收信号估计目标深度,显然是解决水面水下目标分类的新途径之一.
匹配场处理方法[1,2]是对目标进行深度估计的方法之一.这种方法充分利用了声信号的多径传播特点,采用声传播模型来计算拷贝场向量,然后将拷贝场与测量场进行匹配.然而海洋环境条件十分复杂,匹配场定位方法面临计算量大,耗时长,以及海洋参数测量不准等问题.
由于简正波的模态分布是随深度变化的,垂直阵可以实现深度上的采样.长久以来,各国学者对于目标深度的估计方法大多是基于垂直阵而提出的算法[3−6].然而机动平台阵列垂直的姿态很难保持,使得垂直阵在实际装备中应用较少.也有学者利用目标声源模态的概率密度分布,或是从数据中提取海洋环境参数的后验概率密度分布,来对目标的深度进行估计[7−9],这类方法对海洋环境信息需求少,但计算使用的数据量大、耗时长,难以用于实时处理.还有利用声能流有功分量和无功分量正负号的变化来判别水上水下目标的方法[10−13],该方法假设信号中只有前两阶模态的简正波,因此采用的目标信号频率要求很低,实际应用中很难达到.Yang等[14]先从实验数据中反演得到海洋环境参数,再对实验数据进行模态分离,进行目标深度的估计.这种方法使用模态很少,且模态的选取受海洋环境影响大.李焜等[15,16]利用频散特征对声源进行深度估计,需要时域上很短的脉冲信号,而被动声呐接收到的目标信号中很少有这类时域很短的脉冲信号.所以采用水平阵对声源深度进行估计并且对目标信号的要求具有普适性成为研究的重点.
水平阵在深度方向上没有采样,导致很多模态分离的方法不可用,这是应用水平阵的难点所在.Premus等[17]尝试将基于垂直阵的方法直接应用到水平阵上,利用距离信息对信号进行模态分离,但是处理结果非常模糊,很难估计出目标深度.模态与距离相关性低,分离矩阵的逆接近秩为1,并且水平阵虽然在距离上有采样,但是实际被动声呐测距中很难准确获得距离信息.
各国学者经过多年研究,目标方位的估计精度越来越高[18−21].在方位信息与阵元间距都已知的情况下,水平方向上的采样可在相位差中得以体现,此时,我们应用模态域波束形成的方法,可以通过水平阵对目标信号的各阶模态强度进行估计.
本文针对浅海波导中的低频宽带声源,基于波束形成的思想,提出了一种模态域的波束形成算法,利用水平阵从目标信号中提取各阶模态,然后通过模态匹配方法对目标的深度进行估计.
2 模态域波束形成深度估计原理
2.1 简正波原理与模态分离
根据简正波的绝热近似理论[22−24],接收声压谱为
式中zs为声源深度,r为声源和接收阵之间的距离,z为接收阵布放深度,ψn是依赖于深度变化的第n阶简正波的模式函数,krn(f)r为第n阶简正波的水平波数,S(f)为声源的幅频响应,ρ为介质密度,N为当前频率下波导中存在的简正波阶数.由(1)式可以看出,水平阵各个阵元接收到的声压可以看作声源产生的各阶简正波在接收点处叠加的结果.各阶简正波的相位随距离的变化是独立的,依赖于每一阶简正波的水平波数变化.因此利用简正波的相位信息,可以对接收到的声压信号进行模态域上的分离.
2.2 模态域波束形成原理
当符合远场条件时,接收到的声波近似为平面波,声源到每个阵元的声程差为D sinθ,其中D为水平阵的阵元间距,θ为声源的水平方位,相位差为exp(j kD sinθ).则第m个阵元接收到的声压可表示为

式中Y1(f)为第一个阵元接收到的频点f处的声压.考虑到每阶简正波的传播方式,(2)式可以改写为

当声源到达水平阵的距离远大于阵长时,(3)式幅度项分母中声源到达第m个阵元的距离r+(m−1)D sinθ可近似为到达第一个阵元时的距离r.则(3)式可简化为

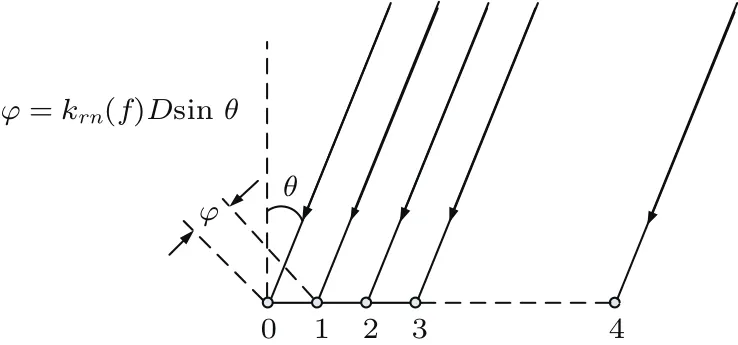
图1 第m阶模态简正波的阵元间相位差Fig.1.The phase diff erence of the Mth norMalMode aMong array eleMents.
如图1所示,每一阶模态对应的水平波数各不相同,所以每一阶模态对应的阵元之间的相位差φ也是不同的.根据波束形成原理[25],通过相位补偿,实现同相相加,输出最大,而其他分量或多或少都有抵消.当我们按照第x阶模态所对应的水平波数进行相位补偿时,各个阵元叠加的输出中,只有第x阶模态分量是同相叠加的,其他分量都被抑制.叠加输出Ysum(f,x)计算公式为
式中M为其他模态的残留分量.当阵元数较多时,不考虑其他模态残留量M产生的影响,叠加输出Ysum(f,x)主要由第x阶的模态分量决定.叠加输出Ysum(f,x)的阶数x取不同值时,S(f)保持不变,krx(f),ψx(zs),ψx(z)等与模态阶数有关的量发生改变.定义变量模态强度Bx(zs,z)为

在计算强度时,忽略因阵元间距不同带来的变化对模态强度的影响.不同深度时,模态强度在模态域的分布是不同的.依据这一特点,可以对目标深度进行估计.
2.3 模态强度的深度分布
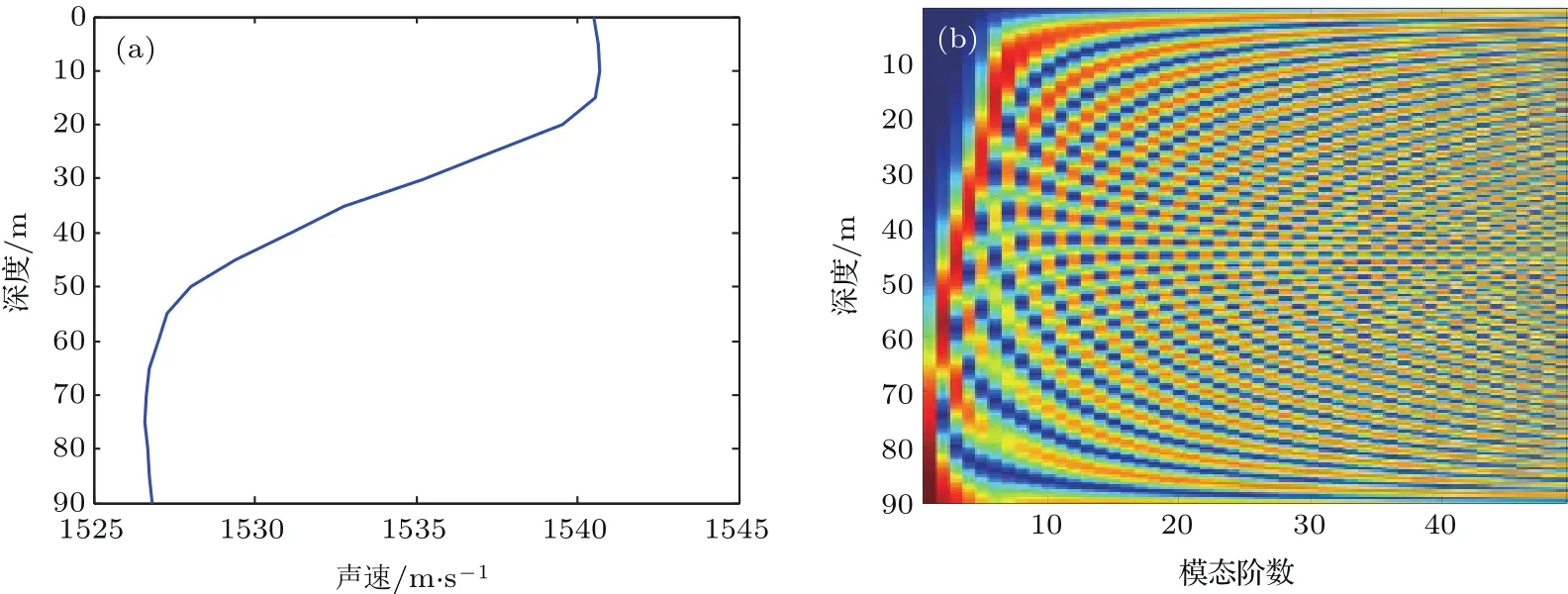
图2 (网刊彩色)(a)浅海声速剖面;(b)模式函数模态深度响应Fig.2.(color on line)(a)Sound speed p rofi le in shallow water;(b)Modal function response to dep th.
2.4 目标深度的匹配估计
2.4.1 单频匹配估计
在已知接收点深度和海洋环境参数的情况下,(6)式中除声源深度外,其他参数均为已知.因此可以得到声源在深度位置固定、观测频点固定时各阶模态强度的参考值为

参考声源深度z0从海面深度到海底深度按一定深度间隔∆z进行扫描,得到所有参考深度位置的模态强度样本.假设基阵接收到的声压经过模态波束形成得到的模态强度值为B(zs,z),对各参考深度模态强度进行相关处理,得到各参考深度下的相关系数为

式中zs为接收信号估计的声源深度;Cov[Bref(z0,z,f),B(zs,z,f)]为Bref(z0,z,f)与B(zs,z,f)的协方差;d[Bref(z0,z,f)],d[B(zs,z,f)]分别为Bref(z0,z,f),B(zs,z,f)的方差.相关系数最大时z0与zs最为接近,此时z0即为水平阵模态域波束形成算法在单个频点上估计得到的匹配深度.
2.4.2 宽带匹配估计
在低信噪比情况下对单个频点进行处理时,容易出现失配的情况.匹配估计在深度上的最大值可能出现在其他深度上.由于噪声的影响,深度匹配估计得到的峰值是随机的,如果使用多个频点对匹配处理的结果进行叠加,可以降低噪声在匹配估计中的影响.
式中f1,f2为频带的频率下限和频率上限.与单频处理相同,多个处理结果叠加后,相关系数R最大时z0与zs最为接近,此时z0即为水平阵模态域波束形成算法宽带匹配估计得到的深度.1
3 仿真实验
3.1 仿真环境及参数设置
简正波模态是基于K racken进行仿真得到的,其中波导参数设定如下:海面为绝对软边界,海底为绝对硬边界,波导中的声速梯度如图2(a)所示,波导中介质密度ρ=1000 kg/m3;波导深度H=90 m,接收阵与声源相距20 km;水平阵阵元数为128,阵元间距为2 m,声波入射方向为30◦.仿真中分析验证的频段为14—500 Hz,仿真深度zs范围为2—89m,深度变化间隔∆z为1m.接收阵位于水深45m处.浅海波导模型如图3所示.

图3 浅海波导模型Fig.3.Shallow water waveguideModel.
3.2 模态估计结果
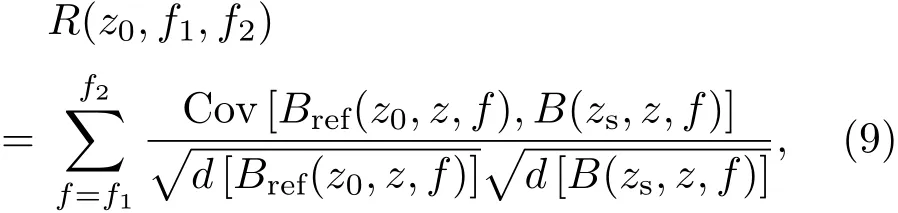
经过模态域波束形成,得到各阶模态强度,将其与理论参考模态强度进行比对.图4所示为417 Hz观测频点的处理结果.从图4可以看出声源位于不同深度时,模态具有不同的分布特点,且模态阶数越高,模态域波束形成得到的结果与参考模态值越接近.
3.3 深度估计结果
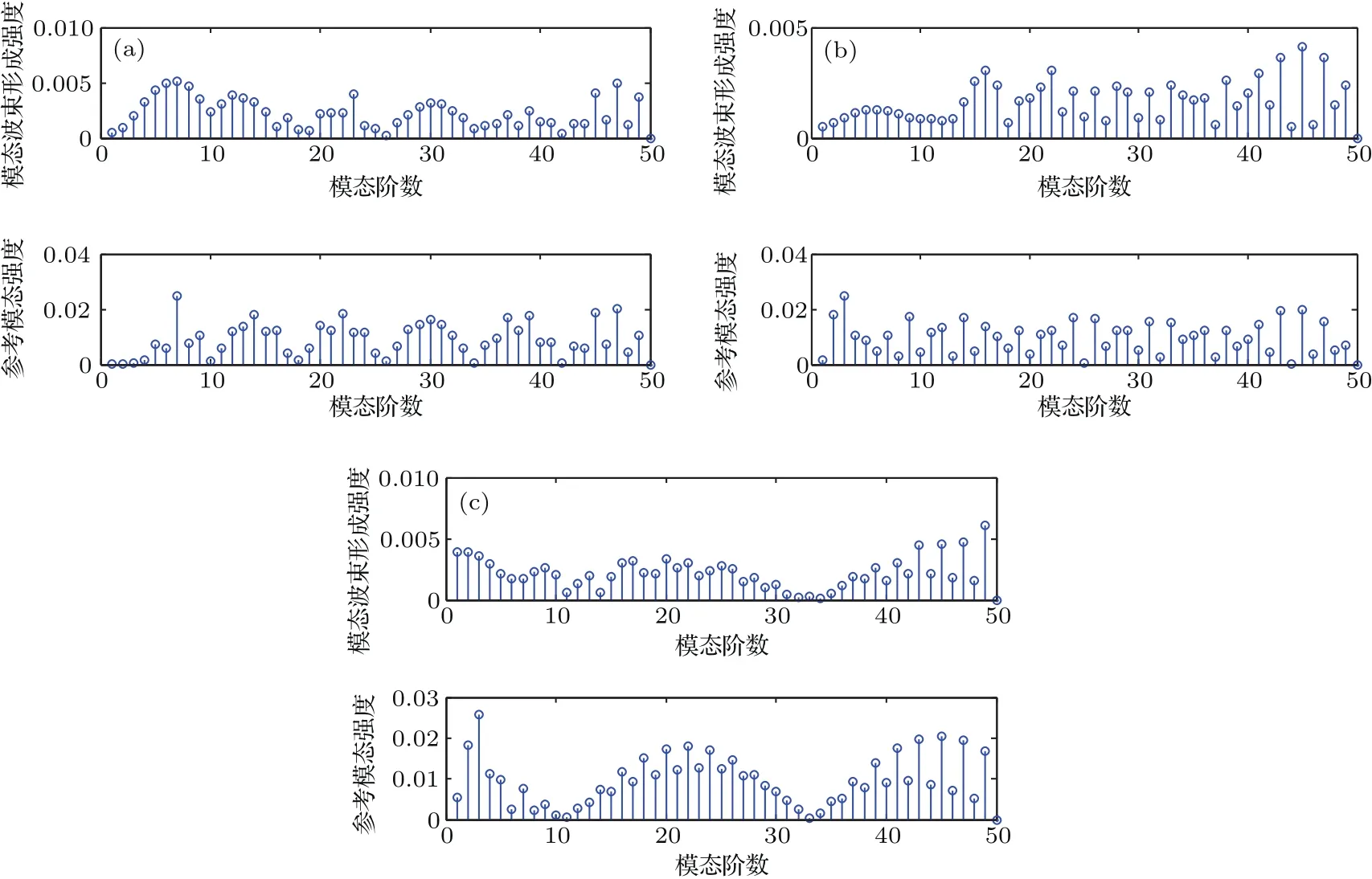
图4 仿真模态与参考模态对比(a)声源深度11 m;(b)声源深度52 m;(c)声源深度86 mFig.4.CoMparison between siMu lation Modality and reference Modality:(a)11 Mdeep sou rce;(b)52 Mdeep sou rce;(c)86 Mdeep sou rce.
在仿真中,利用模态域波束形成得到声源各个深度的模态强度后,将每个深度的模态强度分别与各个深度的模态强度参考值进行相关处理,结果如图5所示.
由图5(a)—(c)可见,相关峰出现的位置与仿真声源的深度位置一致,且峰值很明显.从图5(d)可以观察到,声源深度从2m增加到89m的过程中,深度匹配稳健,未出现失配的情况,深度匹配条纹清晰明显.

图5 (网刊彩色)128元阵深度匹配结果(a)声源深度6 m时仿真模态与参考模态的对比;(b)声源深度48 m时仿真模态与参考模态的对比;(c)声源深度87 m时仿真模态与参考模态的对比;(d)深度匹配条纹Fig.5.(color on line)Dep th Matching w ith 128 sensors:(a)CoMparison between siMu lation Modality and reference Modality w ith sou rce dep th of 6m;(b)coMparison between siMu lation Modality and referenceModality w ith sou rce dep th of 48 m;(c)coMparison between siMu lation Modality and reference Modality w ith source dep th of 87 m;(d)dep th Matching stripe.
4 算法性能分析
在模态域波束形成深度估计方法的研究中,有很多因素制约着深度估计的性能,下面从单频处理和宽带处理两个方面分析影响算法性能的因素和算法的稳健性.
4.1 单频深度估计
单频深度匹配估计仿真结果处理是为了研究阵元数、模态、频率、接收阵深度和信噪比等因素对深度估计性能的影响.
4.1.1 阵元数影响
从(3)式以及模态域波束形成的理论中不难看出,阵元数越多,阵元信号样本越多,因此叠加输出的单阶模态强度信号能量越高,模态域波束形成性能越好.保持观察频率417 Hz和阵元间距2 m不变.改变阵元数为64阵元和256阵元进行仿真,结果如图6所示.
由图6对比结果可以看出当接收阵元数为64时,仿真声源位于30和60 m深度附近的深度匹配条纹不清晰,其他深度干扰峰值强,甚至有匹配错误的情况出现;当阵元数为256时,深度匹配条纹明显清晰,且没有失配的情况出现.这主要是由于阵元数多导致水平距离上样本数多,并且有效阵长的增加提高了简正波各阶模态分离能力.
4.1.2 接收阵深度的影响
接收阵的位置也是影响模态域波束形成深度估计性能的因素之一.模式函数在深度不同时,各阶能量分布也不同,而接收阵深度的模式函数又可以看作对声源信号各阶模态的接收响应.

图6 (网刊彩色)深度匹配结果(a)64阵元;(b)256阵元Fig.6.(color on line)Dep th Matching resu lts:(a)64 sensors;(b)256 sensors.

图7 (网刊彩色)接收阵深度不同时的匹配结果(a)6 m时的模式函数;(b)6 m时的匹配条纹;(c)44 m时的模式函数;(d)44 m时的匹配条纹;(e)85 m时的模式函数;(f)85 m时的匹配条纹Fig.7.(color on line)Dep th Matching resu lts for d iff erent receiving array dep ths:(a)Mode function for 6 Mdep th;(b)Matching stripe for 6 Mdep th;(c)Mode function for 44 Mdep th;(d)Matching stripe for 44 Mdep th;(e)Mode function for 85 Mdep th;(f)Matching stripe for 85 Mdep th.
图7所示为接收阵深度不同时的匹配结果.如图7(a),图7(c),图7(e)所示,接收阵位于不同深度对应的各阶模式函数幅值也不同,深度6 m与深度85 m处所对应的模式函数比44 m处时更有规律.这种规律对应于接收阵对于声源信号的模式灵敏度.当声源较为接近海底时,模式函数幅值规律与图7(e)较为接近;若接收阵较浅,模式函数幅值规律与图7(a)较为接近.此时声源信号中较强的几阶模态在接收端的敏感度却很低,所以图7(b)在70—80 m之间、图7(d)在10—15m间出现了很多错误匹配干扰峰.
接收阵位于44 m深度时,模式函数幅值在阶数上的分布较为一致,对各阶模态的灵敏度也基本相同.因此匹配得到的峰值稳定地出现在预期的声源深度上,没有失配的情况出现.
4.1.3 频点选择的影响
频点的选择对于模态域波束形成的性能也极为重要.频率不同,简正波中所包含的模态数也不同.频率高时模态丰富;频率低时模态少,可用信息少,必然会导致深度匹配模糊.不同观测频点对匹配结果的影响如图8所示.
图8(网刊彩色)选取不同观测频点对匹配结果的影响(a)137.5 Hz;(b)287.5 HzFig.8.(color on line)Matching stripe under d iff erent frequencies:(a)137.5 Hz;(b)287.5 Hz.
图8 (a)选取的观测频点为137.5 Hz,此时简正波只包含16个模态,可用模态数很少,进行相关处理时伪峰幅值与匹配峰幅值接近的概率为11.36%,深度估计错误的概率为23.86%.图8(b)选取的观测频点为287.5 Hz,此时简正波包含34个模态,进行相关处理时伪峰幅值与相关峰幅值接近的概率为12.5%,没有出现深度估计错误的情况.此前对417 Hz频点处理时,在相同仿真条件下,没有出现深度错误估计的情况,并且相关峰明显高于其他峰值.由此可见,417 Hz频点处的处理效果最为理想.
4.1.4 信噪比影响
为了研究该方法在不同信噪比下对目标深度的估计性能,在阵元域引入白噪声,即在每个阵元接收到的声压信号上添加白噪声,探讨模态域波束形成的抗噪声性能.接收深度、信号观测频点、阵元数分别设为45 m,417 Hz和128.图9所示为相应的观测结果.
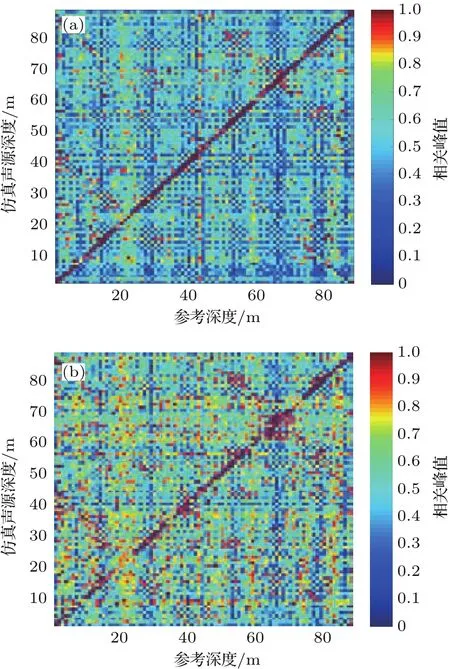
图9 (网刊彩色)不同信噪比(SNR)对匹配结果的影响(a)SNR为0 dB;(b)SNR为−3 dBFig.9.(color on line)Matching stripe w ith d iff erent SNRs:(a)SNR is 0 dB;(b)SNR is−3 dB.
从图9可以看出,信噪比为0 dB时,深度匹配比较稳健,能量比较集中,条纹比较清晰.当信噪比为−3 dB时,出现多处深度失配.由此可见,单个频点进行处理已经不能准确地进行深度估计,需要多频点联合处理.
4.2 宽带深度估计结果
对宽带深度匹配估计结果进行研究主要是为了分析该算法的稳健性,干扰主要来自噪声和海洋环境参数测量不准两个方面.
4.2.1 信噪比影响
单个频点在信噪比为−3 dB时深度匹配有多处失配的现象,解决该问题的方法是宽带处理,将多个频点处理得到的匹配相关结果进行叠加.图10所示为信噪比为−3和−10 dB时的单频和宽带处理结果,从图中可以看出宽带处理时匹配效果得到了明显改善.
图10(a)是对单个频点进行处理的结果,信噪比为−3 dB,频率为417 Hz.可以发现匹配条纹不清晰,多处深度失配.图10(b)中频率范围为200—400 Hz,宽带处理中频率间隔∆f为1 Hz,条纹清晰,深度匹配准确,能量集中在深度匹配的条纹上.图10(c)中信噪比降低至−10 dB,处理频率范围为200—400 Hz,有能量比较集中的深度匹配条纹,也有几个深度出现了失配.图10(d)中信噪比−10 dB,处理频率范围为200—500 Hz,深度匹配准确,条纹变得清晰,效果得到明显改善.由此可见,处理频带带宽的增加,可以有效提高深度估计的性能.但在处理过程中,带宽的增加会导致运算速度变慢,实际应用中也要根据情况进行取舍.
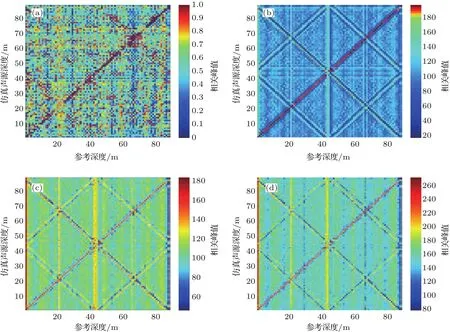
图10 (网刊彩色)宽带处理结果(a)单频,SNR为−3 dB;(b)带宽200 Hz,SNR为−3 dB;(c)带宽200 Hz,SNR为−10 dB;(d)带宽300 Hz,SNR为−10 dBFig.10.(color on line)Matching stripe under w ide frequency band p rocessing:(a)Single frequency,SNR is−3 dB;(b)bandw id th 200 Hz,SNR is−3 dB;(c)bandw id th 200 Hz,SNR is−10 dB;(d)bandw id th 300 Hz,SNR is−10 dB.
4.2.2 声速剖面与波导深度影响
设定声源方向与水平阵的正横方向夹角为60◦,接收阵深度为30 m,其他仿真条件不变,改变声速剖面,比较两种波导深度90和200m下频带范围为200—400 Hz的深度估计结果,如图11所示.
波导条件改变之后,深度估计性能依然良好,匹配条纹清晰,没有出现失配的情况.由此可见,在声速剖面和波导深度变化的情况下这种基于模态域波束形成的算法依然能够准确地对目标深度进行估计.
为了探讨该方法在水文测量存在误差时的估计性能,在声速剖面中加入扰动.图12所示为加入扰动之后的深度估计结果.
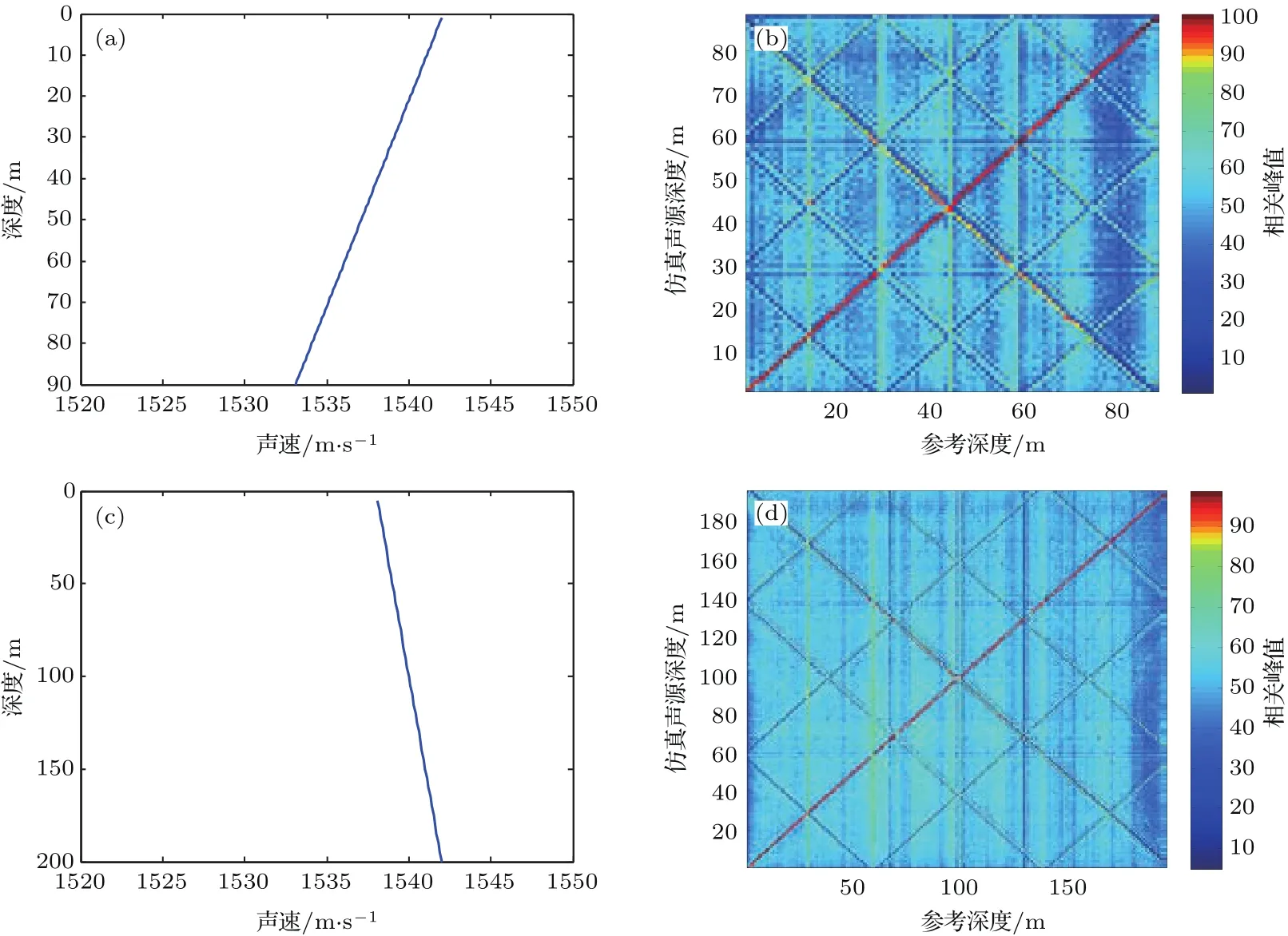
图11 (网刊彩色)改变海洋环境后的处理结果(a)浅海声速剖面1;(b)带宽200 Hz,深度80 m,SNR为−3 dB;(c)浅海声速剖面2;(d)带宽200 Hz,深度200 m,SNR为−3 dBFig.11.(color on line)Matching stripe in diff erent ocean situations:(a)Sound speed p rofi le 1 in shallow water;(b)bandw id th 200 Hz,dep th 80 m,SNR is−3 dB;(c)sound speed p rofi le 2 in shallow water;(d)bandw id th 200 Hz,dep th 200 m,SNR is−3 dB.
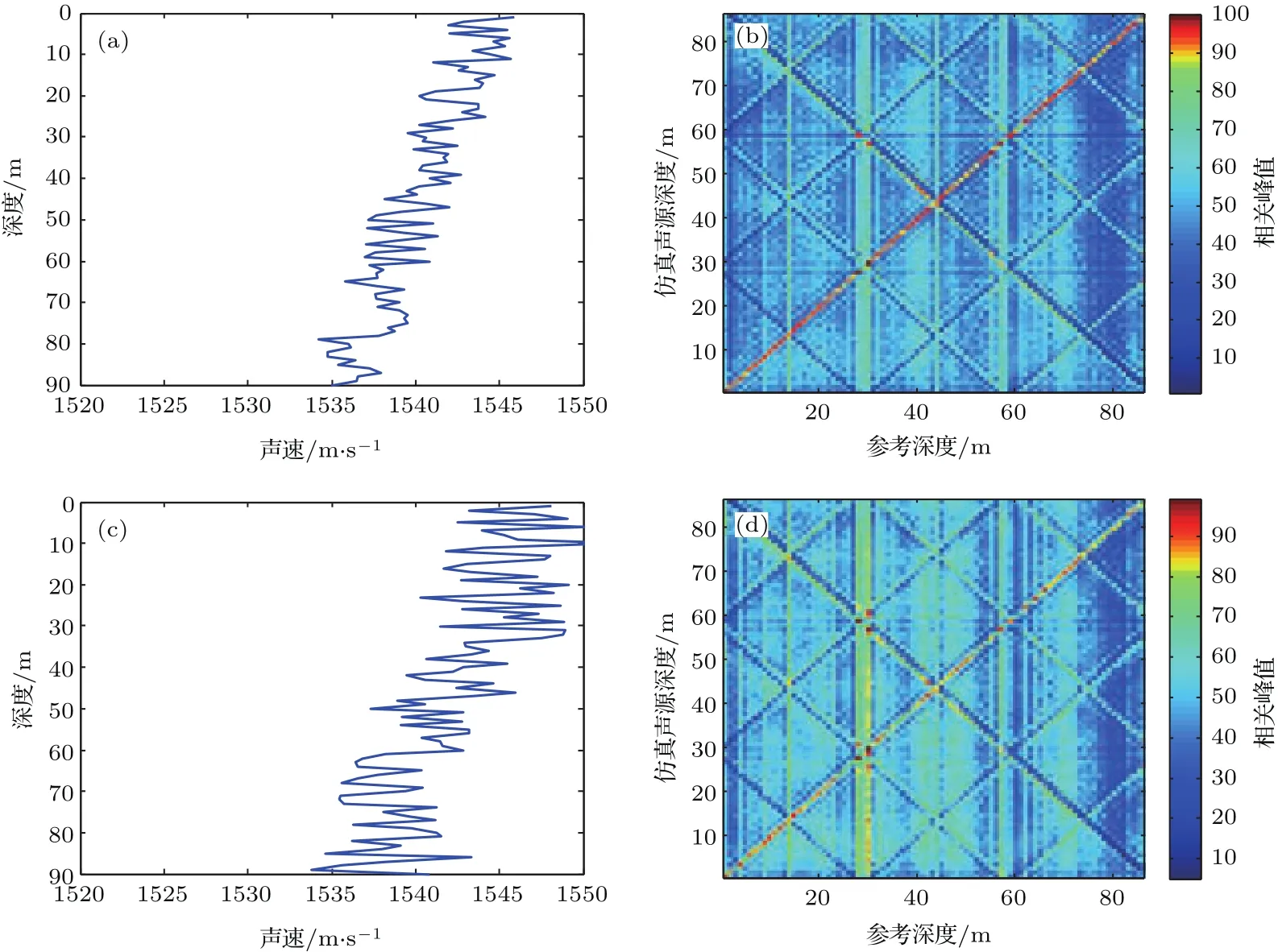
图12 (网刊彩色)声速剖面测量不准时的处理结果(a)浅海声速剖面1;(b)带宽200 Hz,SNR为−3 dB;(c)浅海声速剖面2;(d)带宽200 Hz,SNR为−3 dBFig.12.(color on line)Resu ltsw ith uncertain sound speed p rofi les:(a)Sound speed p rofi le 1 in shallow water;(b)bandw id th 200 Hz,SNR is−3 dB;(c)sound speed p rofi le 2 in shallow water;(d)bandw id th 200 Hz,SNR is−3 dB.
图12中的两个声速剖面是在图11(a)声速剖面上加入不同扰动后得到的结果.图12(a)在声速剖面上加入最大值为5 m/s的随机误差,得到的深度匹配条纹清晰,深度估计没有误判的情况出现;图12(b)是在声速剖面上加入最大值为10 m/s的随机误差,深度匹配条纹仍然存在,但是每个深度的相关峰最大值都出现在42 m处,深度估计不准确,方法失效.
4.2.3 海底参数的影响
图13所示为图11(a)的仿真条件基础上改变海底参数,包括声速c、海底声吸收系数α和海底介质密度ρ所得到的深度匹配估计结果.
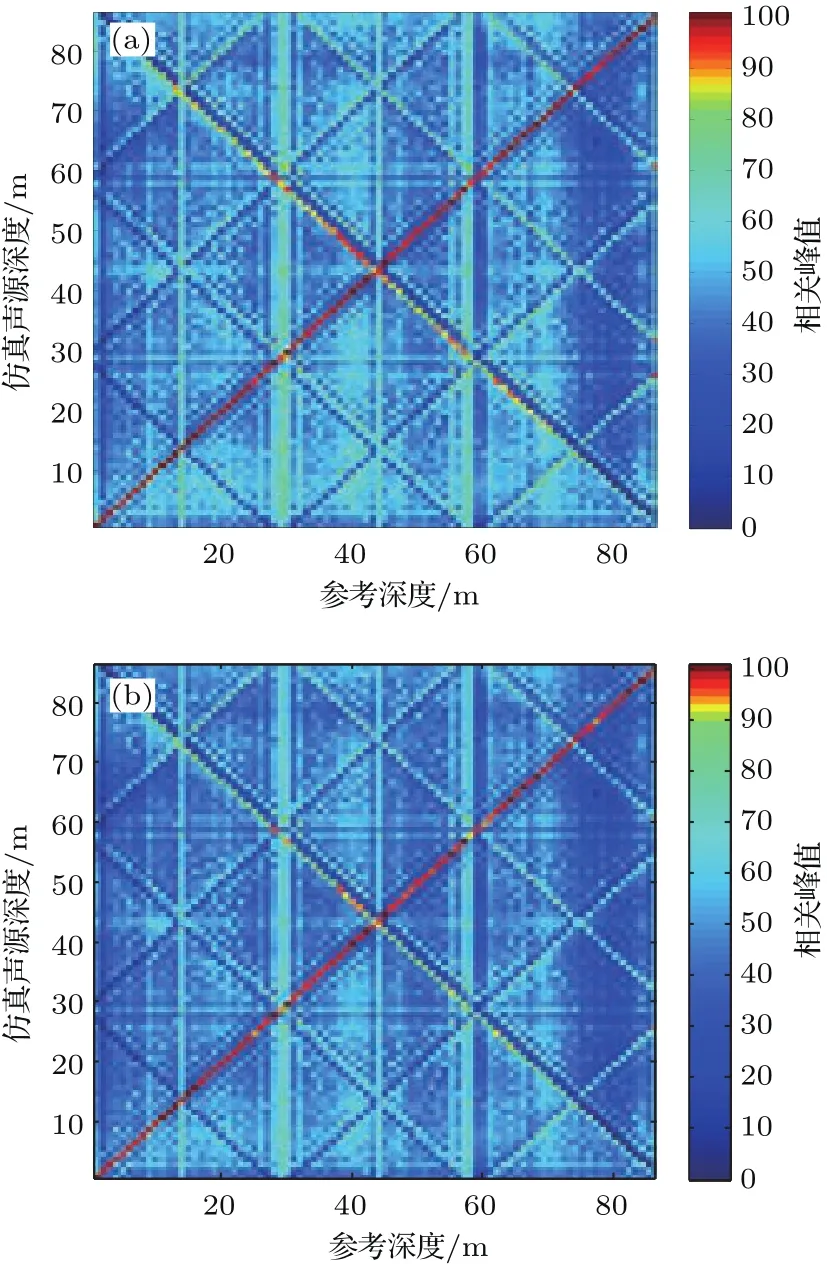
图13(网刊彩色)不同海底参数下的匹配结果(a)c=1728m/s,α=0.3,ρ=1200 kg/m3;(b)c=1738m/s,α=0.4,ρ=1600 kg/M3Fig.13.(color on line)Matching resu lts under diff erent seabed paraMeters:(a)c=1728 m/s,α=0.3,ρ=1200 kg/M3;(b)c=1738 m/s,α=0.4,ρ=1600 kg/M3.
图13 中两个结果的模拟声源仿真条件均为声速c=1728m/s,海底声吸收系数α=0.3,海底介质密度ρ=1200 kg/m3.不同的是,得到参考模态Bref(z0,z,f)时所用海底参数不同,图13(a)采用的海底参数与模拟声源仿真条件一致,c=1728m/s,α=0.3,ρ=1200 kg/m3,图13(b)采用的海底参数与模拟声源仿真条件不一致,c=1738 m/s,α=0.4,ρ=1600 kg/m3,目的是模拟海底参数测量不准是否会对匹配结果带来影响.从图13和数值比对结果发现海底参数对匹配结果的影响并不明显.
4.2.4 声源方向与方位估计精度的影响
在以上仿真中声源方向与水平阵的正横方向夹角为60◦.图14所示为在图11(a)的仿真条件基础上改变声源方向得到的处理结果.

图14 (网刊彩色)声源方向(声源方向与水平阵正横方向夹角)不同时的匹配结果(a)20◦;(b)40◦;(c)70◦Fig.14.(color on line)Matching resu lts w ith d iff erent incident d irections(intersection angle between sound source and horizontal array):(a)20◦;(b)40◦;(c)70◦.
图14为阵元数128,阵元间隔4 m,仿真频段100—200 Hz,信噪比3 dB时的深度匹配结果.目标方向与实际阵长决定了有效阵长,有效阵长越长,对于简正波的模态域波束形成效果越好.理论上,目标处于端射方向时,有效阵长最大.水平阵对于目标方位估计的最优位置是正横方向.由于该方法对深度估计的有效性需要以方位估计较为准确作为前提,所以目标方位估计的性能和模态域波束形成的性能都要考虑.
在图11(a)的仿真条件基础上,仿真声源方向仍为60◦,信噪比为3 dB.假设目标方向加入0.5◦,1◦和1.5◦的误差,即计算声程差补偿相位作模态波束形成时,按照60.5◦,61◦、和61.5◦进行补偿,深度匹配结果如图15所示.
从图15可以看出,在方位预估偏差0.5◦和1◦时,仍然可以较为准确地实现目标深度估计;在方位预估偏差1.5◦时,该方法已经不能对目标深度进行估计.可见,该方法对方位估计精度的要求较高.实际应用中,方位估计精度可以通过增加阵元数目和增大基阵孔径得到提高,且增大阵元孔径可以提高模态分解的精度.

图15 (网刊彩色)方位估计有偏差时的匹配结果(a)偏差0.5◦;(b)偏差1◦;(c)偏差1.5◦Fig.15.(color online)Matching resu ltsw ith angle deviation:(a)0.5◦deviation;(b)1◦deviation;(c)1.5◦deviation.

图16 (网刊彩色)不同频段的匹配结果(a)20—100 Hz;(b)100—200 Hz;(c)300—400 HzFig.16.(color online)Matching results w ith diff erent frequency bands:(a)20–100 Hz;(b)100–200 Hz;(c)300–400 Hz.
4.2.5 不同频段下的深度估计
在进行方位估计时,选用不同频段信号.因为该方法在进行深度估计时需要方位先验信息,所以选用不同频段的信号进行深度估计时,所对应的阵元间距也不同.图16所示为20—100 Hz,100—200 Hz,300—400 Hz三个频段下,来波方向偏离正横方向60◦时得到的深度匹配结果.
图16中阵元间距依次为8,4,2 m,为了保证三个频段下有效阵长一致,阵元数依次为64,128,256,三个频段都可以实现对目标深度的估计.信号的频段不同,来波包含的简正波阶数不同.频段频率较低时,简正波阶数少;频段频率较高时,简正波阶数多.虽然相邻阶简正波之间的水平波数间隔随着频率升高而减小,但高阶简正波相邻阶水平波数间隔相对于低阶简正波的水平波数间隔还是大得多.因此在本文仿真中,当有效阵长一致时,高频段估计效果明显优于低频段的效果.但是在实际海洋环境中,高阶简正波衰减剧烈,实际处理效果并不能和仿真一致,仍需根据具体环境来选择适用的频段.
5 结论
本文从理论上推导了模态域波束形成算法,并用仿真验证了其模态强度估计的准确性.利用不同深度模式函数幅值分布不同这一特点,通过模态匹配相关,实现了对目标深度的估计.通过对单频深度匹配估计仿真的对比分析发现,阵元数越多,信号信噪比越高,频率越高,模态越丰富,有效阵长越长,模态域波束形成性能越好.利用宽带处理时,模态丰富,样本多,深度匹配效果好,抗噪声效果好;不同的阵元间距以及不同的海洋环境下,如波导深度、声速剖面和海底参数不同时,该方法的深度估计性能受到的影响不明显,该方法对海洋环境参数扰动具有鲁棒性.
本文中的浅海波导是参照以往实验数据建立的一个比较理想的模型.在实际海洋环境中,海底倾斜、不平坦,海面的波浪都会对模态分布产生影响.该方法对方位预估的精度要求较高,方位估计在正横位置时最优,而模态分解是在端射时最优,因此方位估计和模态分解很难同时取得最优的处理效果.如何在方位估计与模态分解之间权衡,如何只利用低阶简正波并且在有限阵长下对目标深度进行估计,如何在复杂海洋环境及先验信息不准确的条件下应用该方法是下一步研究的方向.
[1]Yang K D,Ma Y L 2006 Acta Acustica 31 399(in Chinese)[杨坤德,马远良2006声学学报31 399]
[2]X iao C 2011 Ph.D.D issertation(Hangzhou:Zhejiang University)(in Chinese)[肖传2011博士学位论文(杭州:浙江大学)]
[3]K iMK,Seong W,Lee K 2010 IEEE J.O ceans Eng.35 120
[4]Cargar R M,Zu rk L M2013 J.Acoust.Soc.Am.133 320
[5]PreMus V E,W ard J,RichMond C D 2004 IEEE Conference on Signals,SysteMs and CoMputers,Pacific G rove,NoveMber 7–10,2004 p1415
[6]Premus V E,BackMan D A 2007 IEEE Conference on Signals,SysteMs and CoMpu ters,Pacifi c G rove,November 4–7,2007 p1272
[7]Dosso S E,W ilMu t MJ 2009 J.Acoust.Soc.Am.125 717
[8]JemMott C W,Cu lver R L 2011 IEEE J.Oceans Eng.36 696
[9]Dosso S E,W ilMu t MJ 2013 J.Acoust.Soc.Am.133 274
[10]Sun G C 2008 Ph.D.D issertation(Harbin:Harbin Engineering University)(in Chinese)[孙国仓2008博士学位论文(哈尔滨:哈尔滨工程大学)]
[11]Yu Y,Hui J Y,Chen Y,Sun G C,Teng C 2008 Acta Phys.Sin.57 5742(in Chinese)[余赟,惠俊英,赵安邦,孙国仓,滕超2008物理学报57 5742]
[12]Yu Y,Hui J Y,Chen Y,Sun G C,Teng C 2009 Acta Phys.Sin.58 6335(in Chinese)[余赟,惠俊英,陈阳,孙国仓,滕超2009物理学报58 6335]
[13]Hui J Y,Sun G C,Zhao A B 2008 Acta Acustica 33 300(in Chinese)[惠俊英,孙国仓,赵安邦2008声学学报33 300]
[14]Yand T C 2014 J.Acoust.Soc.Am.135 1218
[15]Okopal G,Lough lin P J,Cohen L 2008 J.Acoust.Soc.Am.128 832
[16]LiK,Fang SL,An L 2012 Acta Phys.Sin.62 094303(in Chinese)[李焜,方世良,安良2012物理学报62 094303]
[17]Premus V E,Helfrick MN 2013 J.Acoust.Soc.Am.133 4019
[18]Zhang B H,Zhang X H,Liu J X 2011 Technical Acoustics 30 17(in Chinese)[张本辉,章新华,刘家轩2011声学技术30 17]
[19]K ang C Y,Zhang X H,Han D 2009 Technica l Acoustics 28 90(in Chinese)[康春玉,章新华,韩东2009声学技术28 90]
[20]He X Y,Jiang X Z,Li Q H 2004 Acta Acustica 29 533(in Chinese)[何心怡,蒋兴舟,李启虎2004声学学报29 533]
[21]W ang H,K aveh M1985 IEEE TASSP 33 823
[22]Xu H B,Cao L,W u D J 1993 J.Huazhong Univ.of Sci.Tech.21 36(in Chinese)[许海波,曹力,吴大进1993华中理工大学学报21 36]
[23]W ang N,Huang X S 2001 Science China Series A 31 857(in Chinese)[王宁,黄晓圣2001中国科学31 857]
[24]He Y J 2005 M.S.Thesis(Harbin:Harbin Engineering University)(in Chinese)[何永军2005硕士学位论文(哈尔滨:哈尔滨工程大学)]
[25]T ian T 2009 Sonar Technology(Harbin:Harbin Engineering University Press)p67(in Chinese)[田坦2009声呐技术(哈尔滨:哈尔滨工程大学出版社)第67页]
[26]He Z Y,Zhao Y F 1981 Foundnational Theory of Acoustics(Beijing:National Defense Industry Press)p113(in Chinese)[何祚镛,赵玉芳1981声学理论基础(北京:国防工业出版社)第113页]
(Received 27 June 2016;revised Manuscrip t received 16 January 2017)
PACS:43.30.+m,43.20.Mv,43.30.Bp,43.60.–cDOI:10.7498/aps.66.084301
*Pro ject supported by the National Natural Science Foundation of China(G rant Nos.61271443,61471378).
†Corresponding author.E-Mail:124588315@qq.com
A Modal doMain beaMforMing app roach for dep th estiMation by a horizontal array∗
Li Peng1)2)†Zhang Xin-Hua1)3)Fu Liu-Fang3)Zeng Xiang-Xu3)
1)(School of Underwater Acoustic Engineering,Harbin Engineering University,Harbin 150001,China)2)(Acoustic Science and Technology Laboratory,Harbin Engineering University,Harbin 150001,China)3)(DepartMent ofMilitary Oceanography,Dalian Navy AcadeMy,Dalian 116018,China)
Distinguishing and recognizing water targets and underwater targets has been the focus of passive sonar detection.The depth of the target is closely related to the physical characteristics of the signal.In the shallow water waveguide,the normalmode theory can be used to give a good exp lanation to the acoustic signal physical p roperties.In this paper,a new Method of beaMforMing in horizontal array Modal doMain is proposed.Under the condition of p redicting target azimuth,the diff erence in acoustic path between the horizontalarray eleMents corresponding to the direction of the target signal can be calculated according to the azimuthal information,and the phase delay of each normalmode coMponent of the acoustic signal can be obtained.The horizontalwave number varies w ith order of norMalMode,so each order of the normalmode has a specific phase delay.By using the beaMforMing princip le,when the phase of a certain order of norMalMode is coMpensated for,the output of the superposition of the signal on each eleMent is theModal intensity of the norMalMode.A fter obtaining the target signalModal intensity of each order,based on the shallow water condition,the modal intensities of sound source excitation at diff erent dep ths are obtained as the reference mode intensities of the sound source at corresponding dep ths in the shallow water waveguide by simulating on K racken software.Then,calculating the correlation coeffi cient between the target signalModal intensity of each order and the referenceModal intensity of the sound source at each depth,we search for themaximuMvalue of the correlation coeffi cient.The reference dep th corresponding to theMaximuMvalue of the correlation peak is the estiMated value of the target dep th calcu lated by the Method.Based on physical causes and characteristics of the norMal Modes,in this paper,the influences of the parameters such as the element number of horizontal array,dep th of receiving array,signal-to-noise ratio,velocity profi le,waveguide dep th,azimuthal estiMation accuracy,eff ective array length and app lication frequency band on the perforMance of thisMethod are analyzed.The simu lation results show that the algorithMcan estiMate the depth of the sound source eff ectively by using the signal saMp lew ith a bandw idth of 300 Hz when the signal-to-noise ratio is−10 dB.The w ider the frequency band,the longer the eff ective array length,and theMore the array eleMent number,the higher the accuracy of azimuth estimation w ill be,which w ill bring beneficial eff ects to the depth estimation w ith themethod.In addition,the dep th estiMation perforMance of the proposed Method is still robust when the waveguide conditions such as the velocity profi le and the seafl oor paraMeters are disturbed.
normalmode wave,modal domain beaMforMing,depth estiMation
10.7498/aps.66.084301
∗国家自然科学基金(批准号:61271443,61471378)资助的课题.
†通信作者.E-Mail:124588315@qq.com
©2017中国物理学会C h inese P hysica l Society
http://w u lixb.iphy.ac.cn
