多自由度铺轨道板机器人
2017-08-11李雪莱
李雪莱

研究目的和背景
承载高铁列车的无砟轨道需使用预制的、一定规格的轨道板铺设。这种轨道板的安装精度要求非常高,1m范围内误差不能超过2mm。
一般说来,为了将一个物体从初始位置(对高铁轨道铺设,就是龙门吊放置的初始位置)精确放置到另外一个位置,有可能需要对物体作6个参数的调节,即要对x、y、z轴3个方向的位移和分别绕x、y、z轴的转动等6个自由度进行调节,这就是我要制作六自由度机器人的缘由。我设计制作了多自由度铺轨道板机器人,为工程建设中使用机械精确定位、安装大型工件和设备提供了一种解决方案。
机械结构设计
总体设计
多自由度铺轨道板机器人整体框架结构如图1所示。框架采用不锈钢型材制作,零件连接处采用螺栓连接。框架主要分为抓取部与走行部2大部分,工作时走行部的门架结构移动横跨到被抓取物体上,抓取部抓取物体后在由门架结构宽度及高度形成的工作区域内调整物体的空间位置进行精确定位并安放。
整个方案的执行机构分为控制部、抓取部和走行部。其中控制部位于整个机器人的上部。
抓取部
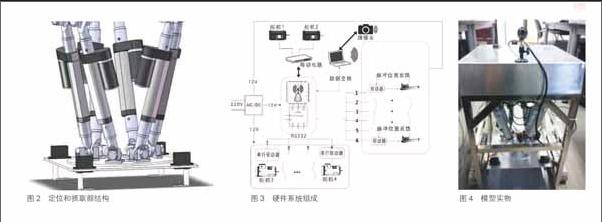
抓取部负责完成对被抓取物体进行抓取、定位的工作,是本机构最主要的部分。抓取部主要分为六自由度转台和抓取架2部分。工作时抓取架用于抓取物体,六自由度转台由ARM控制板控制,可以对空间上的6个坐标准确地定位,对抓取物体的方向、位置进行定位调整,抓取部的结构如图2所示。
定位部分采用6个电动推杆推动6自由度空间并联机构。通过改变6自由度并联机构6个电动推杆的长度,就能够驱动被控对象到达指定的位置和姿态。
抓取部分负责抓取物体,同时也是六自由度转台的动平台。其结构主要为抓取架,以及架四角安装的4个可转动的抓手,工作时抓手转动至被抓取物体下方,六自由度转台(定位部)向上提起即完成抓取动作。抓取架用轻质铝板制作,使用螺栓连接固定。
4个抓手分为前后2对,分别由1个舵机带动抓手管完成转动动作。電机由ARM控制板控制,能够接收指令后精确地转到固定角度,并不需要额外的限位开关。
走行部
走行部承载抓取、定位机构和被抓取物体的重量,在工作中提供稳固的支撑。走行部门架结构两边各安装了1个履带轮,每个铝合金履带轮都是由独立电机驱动,2个大扭力碳刷全金属齿轮电机牵引。在正式的抓取、定位工作前,机构在驱动轮的带动下运行至被抓取物体的上方,左右两边的车轮横跨在被抓取物体两边。驱动轮的直流电机在ARM控制板的控制下工作,可以对运行的距离和方向进行控制,以便机构在合理的位置对物体进行抓取。
控制系统设计
总体设计
整个抓取部和定位部是以1块ARM控制板为核心,用它精确控制6个电动推杆、4个舵机和2个驱动轮电机。控制系统配置了无线传输摄像头,上位机与ARM控制板通过RS232进行数据传输,同时显示实时的图像信息,整个系统通过AD/DC模块将220 V交流电转换成直流电给整个系统供电。
硬件系统设计
硬件系统结构如图3所示。系统分为主控系统、定位部分控制系统、抓取部分控制系统、走行部分控制系统、无线传输系统和电源系统6部分。
主控系统采用ARM32位核心的控制板,它具有控制能力强、运算速率快、外设接口丰富等优点。能接收上位机的指令,协调同步定位和抓起系统的动作,使整个机械系统能够良好地配合,形成一串完整流畅的控制动作,达到作业目的。
定位部分控制系统采用6个电动推杆推动六自由度平台,在一定范围内对被抓取物体作空间6自由度的位置调整及定位,所以对位置控制精确和同步都要求较高。故采用集成带位置反馈的电动推杆,通过驱动器的采集和输出,使每个电动推杆位置系统组成一个完整的位置闭环控制系统,达到较高的位置控制精度。为了使每个推杆保持同步,驱动器配置了RS485的接口,通过RS485总线采用MODBUS协议通信,ARM控制板通过总线依次快速给6个驱动器发出位置控制指令,使6个电动推杆的运动得到高度同步。
抓取部分控制系统通过4个舵机执行机构“抓起”轨道板。抓取放下时,每个舵机必须转动一定的角度,舵机内部集成了小角度闭环控制系统,能达到很高的控制精度和输出力矩。为了同步4个舵机动作时间和角度,控制系统采用RS232总线,能够同时依次快速给每个串行驱动器下达转角位置指令,达到“抓起”轨道板的目的,同理,当放下轨道板的时候,只要逆向转动指定角度即可。
走行部分控制系统采用市场上较为成熟的小车控制系统,ARM控制板输出PWM波,通过H桥直流电路驱动模块驱动2个电机,通过改变电机正反转达到行走和转向的目的。
电源系统将220V交流电转换为12V直流电,并通过电压转换模块转换为各个模块需要的电压。
软件系统设计
在硬件设计的基础上,选择了以安卓系统为核心软件的遥控器,可以实现行走控制、六自由度转台控制、抓取机构控制,整体结构简洁、美观、易于操作。
总结
多自由度铺轨道板机器人模型实物如图4所示。
该作品为工程建设中使用机械精确定位、安装大型工件和设备提供了一种解决方案,创新地采用了六自由度空间并联机构作为运动的主体,整个系统具有控制可行性好、控制精度高和控制灵活的特点,颇具实用性、趣味性和观赏性。
该项目获得第30届全国青少年科技创新大赛创新成果竞赛项目中学组工程学一等奖。
专家评语
该项目选题专业性较强,为工程实际中需要解决的问题。研究方案合理,研究过程正确,设计的六自由度并联机构实现了对轨道板的位置移动,同时制作的模型现场演示效果较好。
