基于层次轮廓计算机视觉的交通路标识别
2017-08-08赵铎
赵铎
(陕西交通职业技术学院 信息工程系,陕西 西安710018)
基于层次轮廓计算机视觉的交通路标识别
赵铎
(陕西交通职业技术学院 信息工程系,陕西 西安710018)
针对现有计算机视觉对交通路标识别的复杂性和不稳定性的问题,通过运用图像轮廓识别技术,提出了由全局特征到局部特征再到结构特征的多层次轮廓识别,在交通路标的识别过程中,分别构造了图像密度、形状度量、光滑程度和轮廓熵值4个层次的图像轮廓,同时结合Sobel算子和信息熵对交通路标图像进行了提取与分块处理。通过实验仿真结果表明:在图像的提取过程中,交通路标图像随着其DMOS值的增大,图像的质量越差,清晰度越低,其NRSS值越小;在图像的识别过程中,低通滤波器的大小设置为7×7,原图NRSS为0.7654,形状度量为1.3和2.4时,NRSS分别为0.3712和0.2667。这种层次化的轮廓分析在路标的识别上具有较好的稳健性。
交通图标;图像轮廓;计算机视觉;图像分块;图像识别
随着数字全息技术的不断发展,计算机视觉应用越来越广泛,尤其在交通路标的识别过程中具有出色的表现[1]。计算机视觉作为机器视觉的分支,在对交通路标识别的过程中可依据路标颜色空间进行划分,并结合不同的算法对尺度不变特征进行提取,最终实现对交通路标的有效识别[2-3]。在计算机视觉下,交通路标图像的采集、压缩、储存和传输过程中都有可能会对图像的质量产生影响,从而直接影响识别的有效判断率[4]。同时,用于成像的CCD图像传感器的分别率低、光的衍射、光路的选择不当等原因导致的采样的交通路标模糊导致的大量高频分量丢失的问题[5],在计算机视觉记录过程中不可避免受限于现实环境。因此,本研究针对交通路标的计算机视觉,采用边缘特征和轮廓信息对图像进行分块处理,提出了一种数字图像层次轮廓分析的图像识别技术。
1 层次轮廓技术基础
1.1 图像的提取
由于交通路标在大小与形状上极为相似,机器视觉识别更加关注交通路标的结构信息,对于交通路标图像的信息提取由其轮廓和边缘构成[6]。对于交通路标图像中的某一像素点Pi,j,采用Sobel算子实现梯度变换来提取图像的轮廓和边缘信息[7]。则计算像素点的梯度信息为:

其中,|·|表示两点之间的距离,dxi,j和 dyi,j分别为图像的水平边缘和垂直边沿掩膜算法。
将获得的交通路标图像按照素点的梯度信息进行分块处理:首先,找出交通路标图像中路标轮廓和边缘信息最为丰富的N个图像块;其次,设置块间的距离步长为4,将图像分成12×12的路标图像小块,即对称的图像块进行重叠整理,这样做的目的是为了减少计算机读取的重复信息,从而避免信息自动分块损失的细节[8];最后,通过计算每一个子图像块的方差来判断高频区域的细节信息,即方差愈大信息丰富度愈高。将方差按从大到小的顺序排列,提取N个图像子块,舍去对称重复子区域。将这些图像子块按照水平方式和垂直方式分别记为{xi,i=1,2…N}和{yi,i=1,2…N},其中 N 的取值对图像的识别精度有显著影响,N越大识别精度越高而算法运行速度越小,因此,需要选取合适的图像划分数量。通常情况下,运用边缘轮廓所占图像的比例来进行取值,即N的取值为2的整数次幂[9],即

1.2 图像的识别
在图像边缘特征的提取与图像分块时可能出现厚边或断点等情形,导致轮廓图像的精度不够或是信息丢失,检测出的轮廓像素点并不连续[10]。本研究对轮廓图像的分层识别提出4个层次对图像进行识别和匹配。
1)图像密度:计算机视觉识别物体全局特征时,图像子块的轮廓长度所包含对象面积的大小,图像密度表达式如下[11]:

2)形状度量:将轮廓上的点到轮廓中心的距离函数[12]:

其中,Ci只考虑其数值的大小而忽略其顺序。若直接用该序列对交通路标进行匹配,除了要考虑图像子块起始点的位置,还要考虑图像的形变以及子块重叠区域等情况。结合标准差对轮廓的起伏变化程度进行全局特征描述的衡量。计算方法如下:

3)光滑程度:在图像轮廓匹配中,除了形状等几何特征易于识别外,轮廓的曲率也是图像的重要特征。但由于数字图像中轮廓以像素点的形式呈现,表现出不光滑性,其曲率的计算存在一定难度[13]。对于交通路标图像中的某一像素点Pi,j的曲率计算为:

其中,|·|表示两点之间的距离。
4)轮廓熵值:交通路标图像的全局与局部特征相比,全局的结构特征描述的是轮廓中一种基本更为精确结构单元特征,在描述图像轮廓特征时具有较好的灵活性和更强的适应性。局部的结构特征描述的是待识别物体轮廓上各点的分布情况,用极窗来量化轮廓内容,通过形状像素点计算轮廓间的匹配度。而信息熵作为衡量了系统的复杂度,通过计算划分随机捕获的图像子块出现的期望值,其信息量随着信息熵的增大而增大[14]。计算轮廓信息熵值Q为:
其中,pi为轮廓上点落在第i个窗口中的概率。
2 计算机视觉交通路标识别
为了实现计算机对交通图标的识别,采用层次轮廓识别算法过程中,首先对二值图像进行边缘检测或边缘跟踪得到更准确轮廓图像,获得轮廓图像和得到了连续的轮廓像素点,以便于下面轮廓特征的描述。清晰的交通路标由于包含大量的高频信息经过低通滤波得到的图像损失了大量的高频信息成分,滤波前后图像差异较大,得到的结构相似度的值较小;交通路标的小分块由于只丢失少量的高频信息,经过低通滤波器随时的高频成分相对较少,滤波前后的路标差异较小,得到的结构相似度较大。其中,层次轮廓的路标图像边缘特征提取和图像分块流程,如图1所示。
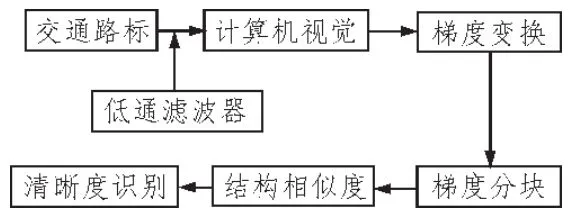
图1 路标图像轮廓的提取与分块的流程
对于交通路标轮廓形状度量的变化,运用特征描述可以对交通图标的不同形状具有很好的区分度,对于常见的路标图像可以按照圆形、正方形和三角形进行划分,当轮廓长度相等时,质点距离的标准差分别为0、0.34和1[15]。交通路标主要分类3大类:禁令、警告和指示。每个大类的交通路标都有统一的轮廓类型,例如,禁令类的交通路标为黑色三角形边框的红色背景的标示,警告类的交通路标为黑色正方形边框的黄色背景的标示,指示类的交通路标为白色圆形边框的蓝色背景的标示。这3大类边框对应图2中3种不同形状。不同形状质心距离标准差如图2所示。

图2 质心距离标准差
针对计算机视觉下的交通路标提出了能够识别轮廓特征的4个层次划分描述:具有全局特征的紧密度D和形状度量σi,反应局部特征的轮廓光滑程度K(i)以及显示结构特征的轮廓熵值Q。将这4个层次轮廓特征描述子组成一个结构化的、综合性很强的图像轮廓特征 F={D,σi,K(i),Q},用其作为计算机视觉对交通路标图像的识别和匹配,展现出了较好的稳健性和容错能力。
3 仿真实验
本研究实验的硬件环境为Intel i7-4850HQ处理器(4 核,单核主频 3.5 GHz),物理内存 4 GB,操作系统为64位Windows7,算法基于Matlab软件进行编程。数据共收集了300张交通路标图像进行计算机视觉的算法训练,并且每张交通路标的图像采用JPG格式且为1280×800像素,同时考虑到交通道路上周围环境可能造成的部分遮挡和光照强度的不同引起的交通图标的采集信息对识别的误判,本实验对收集的交通路标图像进行了仔细的删选尽可能的减少样本取样误差对计算机视觉识别结果的误差。
为了验证本研究提出的层次轮廓计算机视觉对交通路标识别分析的合理性,将通过两个实验来验证:实验一,利用失真图像的主观差异评分DMOS(Difference Mean Opinion Scores)值[16]和无参考结构清晰度 NRSS(No Reference Structure Scores)[17]来对图像的提取失真差异进行分析;实验二,利用层次轮廓计算机视觉对图像进行识别来判断算法的有效性。
实验一:300张交通路标图像分为禁令、警告和指示每大类各100张,使用gblur子文件夹下的图像进行试验,实验时选用同一张交通路标图像不同模糊程度的失真图进行对比,结果如表1所示。

表1 不同程度的模糊失真图像对比
由表1可知,交通路标图像随着其DMOS值的增大,图像的质量越差。质量较差的图像在低通滤波器在计算机视觉下的梯度变换图像的结构相似度值就越大,NRSS的值就会越小。同时,随着交通路标图像的清晰度越低,其NRSS值越小,即采用图像边缘轮廓提取的方式对交通路标的识别具有可行性。
实验二:在实验一对所使用的交通路标图像清晰度提取的基础上,利用本研究提出的层次轮廓计算机视觉识别技术对分块处理后的图像进行识别。将两幅计算机视觉下的图像与失真图像进行对比:将高斯低通滤波器的大小设置为7×7,路标图像的形状度量标准差分别设置为1.3和2.4。不同程度计算机视觉图像的识别与对别,如图3所示和表2所示。
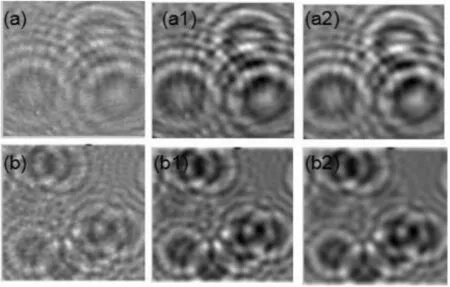
图3 不同程度计算机视觉图像的识别

表2 不同程度计算机视觉图像对别
如图3所示,形状度量值越大,交通路标图像越模糊,即越难以实现识别,如表2所示,交通路标图像越模糊,经过层次轮廓计算机视觉得分越低。实验结果表明,本研究提出的层次轮廓计算机视觉识别能够有效的识别交通图标信息。通过设置滤波器的大小来获得不同清晰程度的交通路标图像作为识别的图像。
4 结 论
本研究提出了一种基于层次轮廓计算机视觉的交通路标识别,为了提取合适的识别的图像,采用Sobel算子实现梯度变换来提取图像的轮廓和边缘信息,结合信息熵计算图像信息丰富度并对交通路标图像进行分块处理,减少了对称重叠区域的重复计算。在交通路标的识别过程中,分别构造了图像密度、形状度量、光滑程度和轮廓熵值4个层次的图像轮廓识别。通过实验仿真表明,对模糊的计算机视觉图像能够通过条件滤波器的大小实现数字全息图像,利用层次轮廓计算机视觉分析可以有效的筛选出全息图像,提高全息图像的质量,有效的控制由于失真引起的识别误判。
[1]刘金龙,薛名芷.机器视觉技术在交通路标识别中的实现方法[J].硅谷,2014(5):46.
[2]吴锦晶,张仁杰,唐春晖.交通路标图像的分割与识别方法研究[J].光学仪器,2011,33(5):34-41.
[3]吴晓燕.路标图像识别的禁忌搜索遗传算法研究[J].计算机工程与设计,2014,35(6):2109-2113.
[4]刘义杰,张湘平,谭霜.基于视觉注意机制的交通路标检测方法 [J].计算机应用研究,2012,29(10):3960-3963.
[5]杨杰,王直杰,董宗祥.复数Hopfield神经网络在路牌识别中的应用 [J].微计算机信息,2010,26(22):161-163.
[6]杨佳,黄玉清,陈小宁.基于区域生长的机器人路标识别方法研究 [J].计算机工程与设计,2008,29(13):3410-3412.
[7]赵文达,续志军,赵建,等.基于梯度直方图变换增强红外图像的细节[J].光学精密工程,2014,22(7):1962-1968.
[8]程鹏,朱美琳,耿华.一种基于梯度Hough变换和SVM的圆检测算法 [J].计算机与现代化,2013(2):22-26.
[9]毛若羽,陈相宁.改进的HSI空间形态学有噪彩色图像边缘检测[J].计算机应用研究,2013,30(2):635-637.
[10]张桂梅,张松,储珺.一种新的基于局部轮廓特征的目标检测方法 [J].自动化学报,2014,40(10):2346-2355.
[11]陈恺,何晨,陈运.等.基于小波变换和相调制图像密度伪彩色编码的图像增强处理[J].天津理工大学学报,2012,28(3):71-75.
[12]贾棋,刘宇,郭禾,等.以度量分段约束为特征的形状匹配算法 [J].计算机辅助设计与图形学学报,2014,26(1):65-71.
[13]伍济钢,宾鸿赞.用HOUGH变换改进的曲率法识别平面轮廓图元 [J].图学学报,2011,32(2):102-106.
[14]吴泽鹏,郭玲玲,朱明超,等.结合图像信息熵和特征点的图像配准方法 [J].红外与激光工程,2013,42(10):2846-2852.
[15]刘罡,李元香.分子动理论的新型反向差分演化算法 [J].小型微型计算机系统,2012,33(1):115-120.
[16]王阿红,郁梅,彭宗举,等.一种基于人眼视觉特性的立体图像质量客观评价方法 [J].光电工程,2011,38(1):134-141.
[17]陈浩,陈健,叶轻,等.基于相邻像素差与NRSS的自动对焦算法[J].计算机工程,2015,41(9):261-265.
Traffic road sign recognition based on computer vision outline level
ZHAO Duo
(Departments of Information Engineering,Shanxi Vocational and Technical College,Xi'an 710018,China)
For the complexity of problems and instability existing computer vision,traffic signs recognition,through the use of image recognition technology outline presented by the global to the local feature characteristic feature of multi-level structure and then outline recognition,the recognition process of traffic signs the were constructed image density,shape measurement,smoothness and contour entropy four levels of image contours,combined with Sobel operator and traffic signs image information entropy were extracted and processed block.The simulation results show that:in the extraction process of an image,the image with the increasing traffic signs DMOS its value,the worse the image quality,the lower the resolution,the smaller the NRSS value; in the recognition process of the image,the low when the size of the set-pass filter is 7×7,picture NRSS to 0.7654,shape of metric is 1.3 and 2.4,NRSS 0.3712 and 0.2667 respectively.This level of profiling has better robustness in recognition of road signs.
traffic icon;image contours; computer vision; image block; image recognition
TN949.6
:A
:1674-6236(2017)14-0123-04
2016-05-07稿件编号:201605063
赵 铎(1983—),男,陕西西安人,讲师。研究方向:计算机领域。
