永磁同步曳引机变频调速系统的内模控制
2017-08-07李明辉
李明辉
(西继迅达电梯有限公司,河南 许昌 461000)
永磁同步曳引机变频调速系统的内模控制
李明辉
(西继迅达电梯有限公司,河南 许昌 461000)
永磁同步曳引机是典型的非线性多变量强耦合系统,在同步旋转坐标系下dq轴电流存在耦合,传统的PI控制器无法实现解耦,提出一种基于内模控制原理和空间矢量算法相结合的高性能永磁同步曳引机解耦控制方法,用内模控制策略控制理想电机模型,对定子电流交叉耦合电势动态解耦,提高系统的动态响应性能,同时在整个电流闭环过程中对参数摄动和外扰动具有良好的鲁棒性,这种方法不需要额外的电机参数和检测硬件,试验结果验证了这种方法有效可行。
永磁同步曳引机; 内模控制; 解耦; 稳态误差; 观测器; 空间矢量脉宽调制
0 引 言
永磁同步曳引机(Permanent Magnet Synchronous Traction Machine,PMSTM)以其体积小、功率密度高、转矩/惯量比高等特点在电梯行业应用非常广泛。低速大转矩的应用特性决定了电梯PMSTM多采用凸极效应明显的外转子集中绕组结构。集中绕组PMSTM含有丰富的定子磁势谐波,在同步旋转坐标系下定子电压中耦合电压和反电势对dq轴电流交叉耦合作用复杂。传统同步PI控制依赖电机本体参数,且忽略了dq轴电流交叉耦合,实际工程中,当其中一个轴上的电流改变时,对另一轴上电流产生瞬时误差,使转矩输出产生瞬时畸变,影响系统动态性能。
内模控制(Internal Model Control,IMC)作为一种先进的控制技术,其不过分依赖于被控对象的准确数学模型,在PI解耦电流主控器的基础上,构造电流环的内模状态方程,利用IMC原理设计电流环观测器,实现电流补偿控制,对系统内部参数摄动及外部环境扰动具有自适应性。系统跟踪性能好,鲁棒性强 ,控制器参数单一,结构和算法简单,调整方向明确,工程上易于实现。
1 PMSTM的数学模型
不考虑PMSTM的制动系统,PMSTM可简化为凸极效应明显的永磁同步电机(Permanent Magnet Synchronous Motor,PMSM),在同步旋转坐标系下数学模型为
式中:Ld、Lq——直轴和交轴电感;ψ——转子磁钢产生的永磁磁链;R——定子绕组电阻;ω——转子电角速度;id、iq——直轴和交轴电流;ud、uq——直轴和交轴电压。
由式(1)和式(2)可见,模型的准确度依赖于系统参数。对定子电流id、iq表现为一阶时间滞后环节,d轴和q轴电流分别对q轴和d轴方向产生耦合电动势。如果定子电流id、iq完全解耦,由式(1)和式(2)可得
式中:ud0、uq0——电流解耦后的直轴和交轴电压。
2 基于IMC观测器的PMSTM控制设计
IMC的原理是利用反馈滤波器来改善鲁棒性和对抗性,本质是一种鲁棒控制方法,是PI控制的扩展,等效于交叉解耦的PI控制。其原理如图1所示:R(s)为参考输入,F(s)为信号反馈,E(s)为PI控制器输出,C(s)为内模控制器,G(s)为系统传递函数,Gm(s)为内模,d(s)为扰动信号,Y(s)为输出。
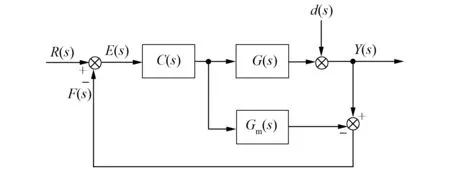
图1 内模控制原理图
根据图1可得

如果内模建模精确,与系统模型匹配,即Gm(s)=G(s),则由式(5)、式(6)可得

由式(7)可知,系统反馈信号F(s)就是扰动信号d(s);由式(8)可知,如果C(s)G(s)=1,C(s)=1/G(s),系统可对扰动信号进行完全补偿,Y(s)=R(s),系统实现开环系统控制,输出信号可以直接跟踪输入信号。
按照上述IMC原理,将式(3)和式(4)拉普拉斯变换后得

可得
其中:

若使C(s)=D-1(s),就构成IMC,使得输出Y(s)=R(s),则输出电流可以直接跟踪指令电流。由于D(s)表现为一阶系统,没有纯时延和右半平面的零点,所以系统是天然稳定的。为了优化控制器参数,增加一个低通滤波器,增强系统鲁棒性,定义:
其中:
式中:α——调制系数。
则所定义的C(s)为
将内模结构模型等效为反馈控制模型,如图2所示。

图2 等效反馈控制模型
其中:H(s)=
可以看出IMC本质是PI控制的一个扩展,等效于交叉解耦的PI控制。从以上分析可以得到如图3所示的电流内模解耦控制器框图。
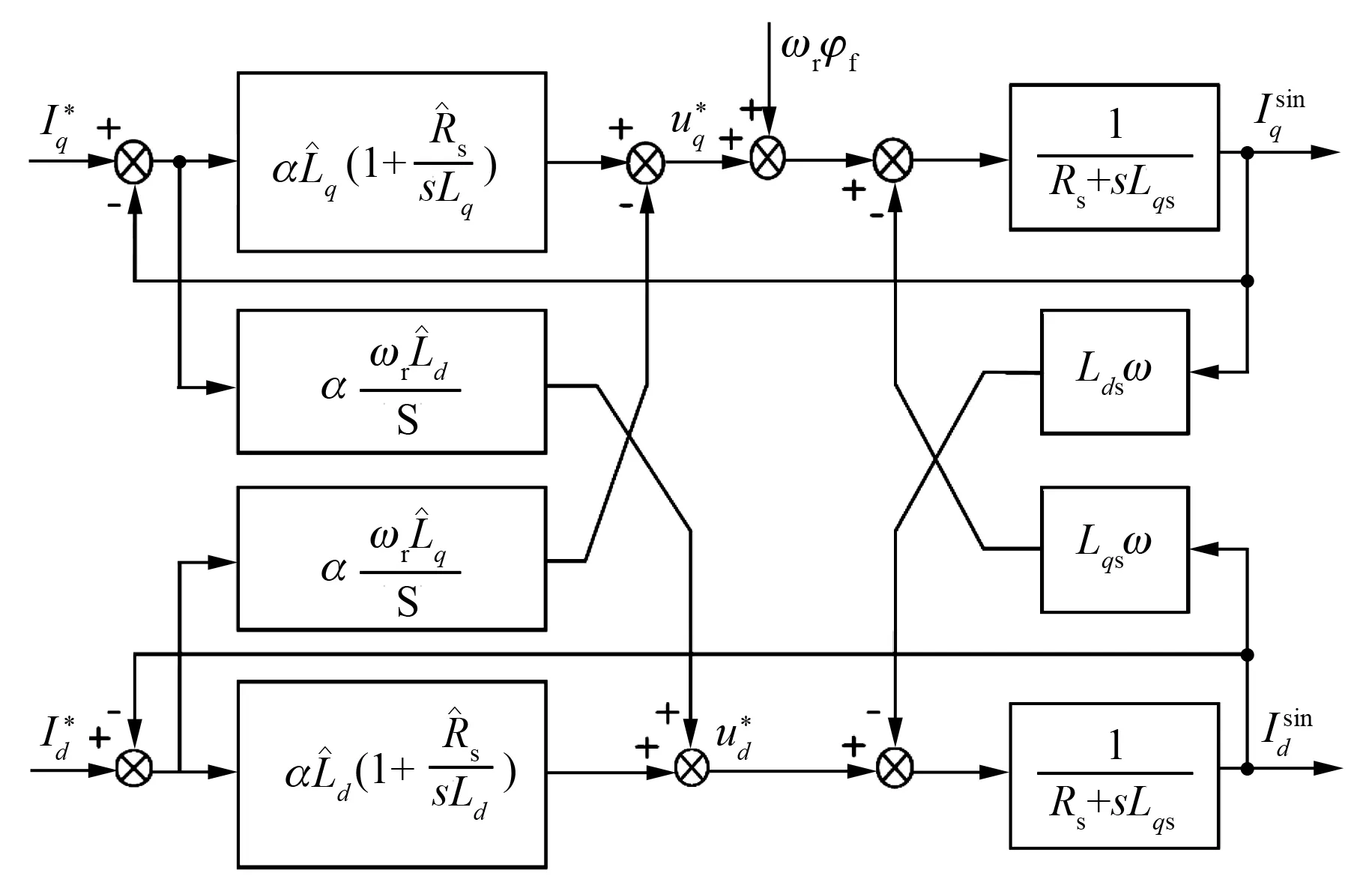
图3 电流内模解耦控制器
由图3可知,内模解耦控制调节参数只有α,算法简单,参数单一,在线调试方便,且系统没有超调,是天然稳定的。系统阶跃响应上升时间与参数α的关系为
由式(15)可知,系统响应时间tr与调节参数α成反比例,增大调节参数α将减小系统响应时间,加快系统响应速度,但是α不能无限增大,实际工程中系统响应时间受限于硬件的电气时间常数。
3 IMC在SVPWM电流环控制中的应用

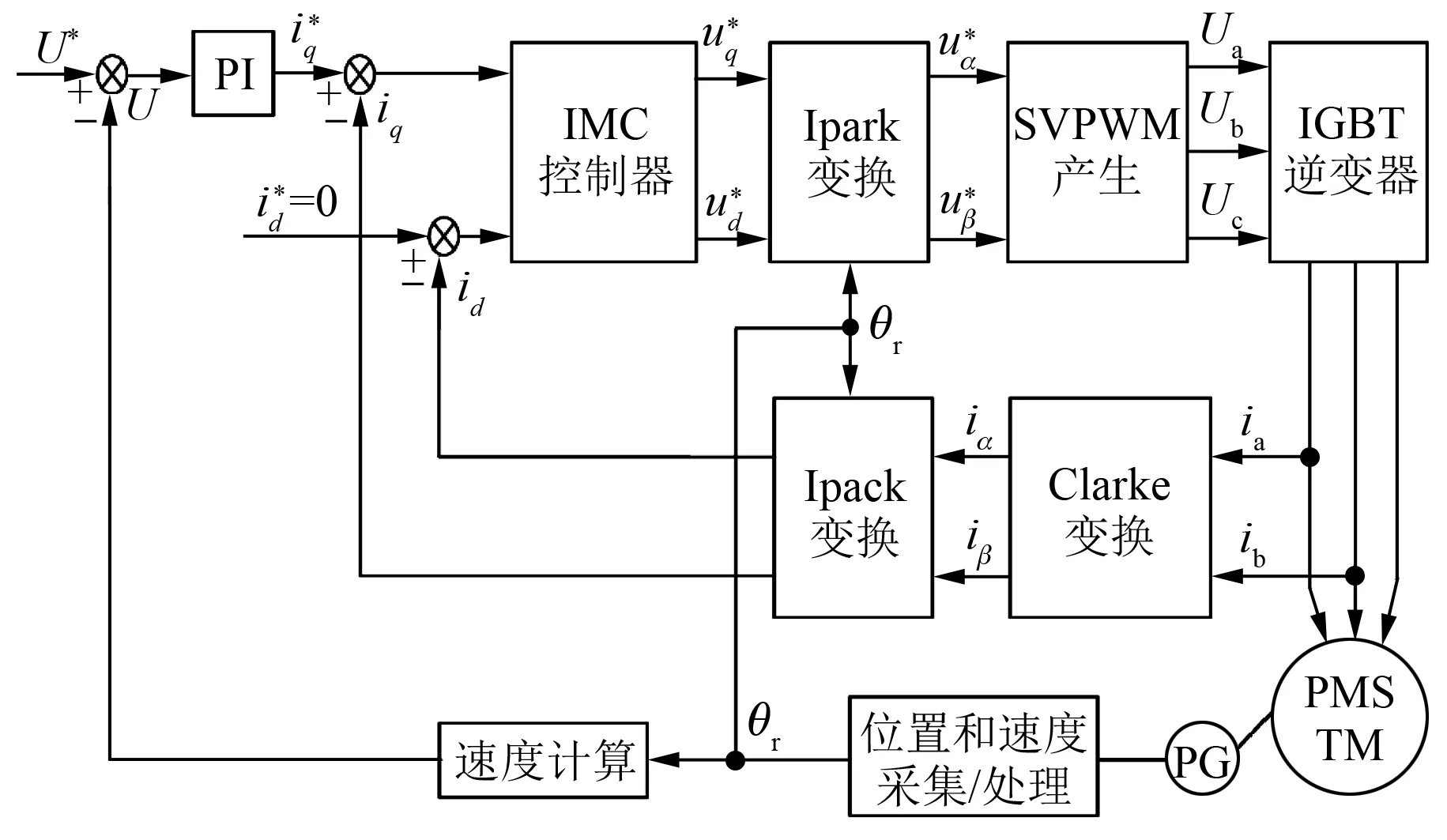
图4 带内模控制器的SVPWM控制系统图
4 试验平台的硬件和软件设计
4. 1 硬件设计
试验平台硬件采用美国TI公司的TMS320F2812 DSP最小系统为核心算法处理器,德国SEMIKRON的SKD75为三相整流电路,日本三菱公司的PM75RLA120 IPM为三相电压源逆变器,以瑞士LA霍尔电量传感器和德国海德汉公司ERN1387 sin/cos编码器为反馈传感器,组成PMSTM变频调速驱动控制平台,如图5所示。

图5 试验系统组成框图
霍尔电流传感器将A、B相电流隔离转换成电压信号,经过运放电路输入到DSP的A/D模块进行采样计算、内模控制器交叉解耦等处理得到反馈电流分量,与sin/cos编码器C、D采集的转子角度位置信息一起参与电流环的调节运算,sin/cos编码器A、B经过比较电路获取正交信号,输入到DSP的正交编码脉冲电路(QEP),通过检测脉冲的边沿信号4倍频后给DSP内部计数器,计算出转子反馈速度,参与速度环的调节运算。
4. 2 软件设计
系统软件设计主要有主程序、中断程序和子程序三部分组成。主程序主要完成DSP内部控制寄存器的初始化,系统上电自检,函数初始化,参数的设定、标幺,中断处理,HMI调用等,如图6(a)所示。考虑到PMSTM控制的实时性和快速响应,把电流、电压、编码器的信号采集,控制算法以及SVPWM波的产生,功率器件保护等放在定时中断程序里,如图6(b)所示。将通信、人机交互、算法单元等编译成子程序供调用。
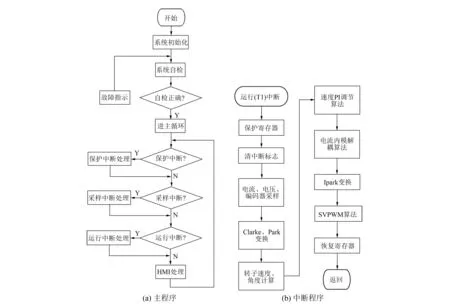
图6 曳引机控制程序流程图
5 试验及结果分析
试验平台中选用的PMSTM额定转速为180 r/min,额定功率11.7 kW,额定电流24 A,额定转矩670 N·m,磁极数24极,定子相电阻0.345 Ω,电感14.2 mH,电流环采样频率选取16 kHz,速度环采样频率选取160 Hz,采用内模交叉解耦控制和PI控制对比,每个采样周期在TMS320F2812的缓冲区中记录速度、电流的指令值和反馈值,利用DLOG4CH四通道软件记录模块,通过XDS510仿真器将记录数据发送到CCS仿真软件,利用软件的Graph功能实时记录、比较指令值和反馈值之间的误差。通过HMI的SCI串行通信接口将采样数据传送到PC中,运用MATLAB进行存储、处理分析、比较显示。
试验中,初始角速度给定为20π rad/s,在t=0.08 s时刻角速度给定由 20π rad/s升为40π rad/s, 在t=0.57 s时刻角速度给定从40π rad/s降到20π rad/s,每间隔6.25 ms获取一组PMSTM角速度ω、电流iq、电流id、A相电流iA试验数据,将试验数据绘制成时域曲线。图7和图8分别为IMC交叉解耦控制和传统PI控制所得到的角速度ω、电流iq、电流id、A相电流iA的时域曲线图。两种控制方式所得到的角速度ω的响应时间基本相同,IMC所得到的角速度ω的稳态误差为PI控制的40%,iq和id电流纹波值为PI控制的50%,对电流环实现了更好的补偿控制。

图7 IMC控制得到的ω、iq、id和iA

图8 PI控制得到的ω、iq、id和iA
通过对角速度ω分别为10π、20π、30π、40π、50π rad/s时,IMC和PI控制方式试验所得数据统计分析,得出两种控制方式的主要参数对比,如表1所示。可见,在IMC控制方式下的角速度稳态误差小于PI控制方式下的角速度稳态误差,而且,随着角速度越大稳态误差越小;IMC控制方式下的iq和id电流纹波值小于PI控制方式下的iq和id电流纹波值,而且,随着角速度越大电流纹波值越小。

表1 IMC和PI控制方式的试验结果
6 结 语
本文针对电梯PMSTM多变量强耦合系统,受参数摄动和外扰动影响问题,利用IMC原理,构造电压和电流的内模方程,提出了一种基于内模控制原理和空间矢量算法相结合的交叉解耦控制方法。该方法系统响应快,鲁棒性好,在动态和稳态下都能达到很高的控制精度,控制算法易于用DSP实现,适用于转子磁场定向的SVPWM矢量控制。经过基于TMS320F2812试验平台的工程实际验证,各项指标满足电梯PMSTM控制要求。
[1] 郭新华,温旭辉,赵峰,等.基于电磁转矩反馈补偿的永磁同步电机新型IP速度控制器[J].中国电机工程学报,2010,30(27): 7-13.
[2] 黄科元,周滔滔,黄守道,等.永磁伺服系统基于微分自适应补偿的快速无超调控制策略[J].电工技术学报,2014,29(9): 137-144.
[3] 王玲芝.改进的永磁同步电机直接转矩控制系统仿真实现[J].电力系统保护与控制,2009,37(19): 65-68.
[4] 苏玉刚,徐健,谢诗云,等.电场耦合型无线电能传输系统调谐技术[J].电工技术学报,2013,28(11): 189-194.
[5] 梁骄雁,胡育文,鲁文其.永磁交流伺服系统的抗扰动自适应控制[J].电工技术学报,2011,26(10): 174-180.
[6] 刘颖,周波,方斯琛.基于新型扰动观测器的永磁同步电机滑模控制[J].中国电机工程学报,2010,30(9): 80-85.
[7] 李玲玲,朱芬芬,姚致清,等.基于可信度的可靠性度量云模型[J].电力系统保护与控制,2012,40(8): 90-94.
[8] 王伟华,肖曦.永磁同步电机高动态响应电流控制方法研究[J].中国电机工程学报,2013,33(21): 117-123.
[9] 陆文斌,姚文熙,吕征宇.基于改进闭环磁链观测器的感应电机无速度矢量控制[J].电工技术学报,2013,28(3): 148-153.
[10] 刘家曦,李立毅.考虑磁场交叉耦合的内嵌式永磁同步电机初始位置检测技术[J].电工技术学报,2013,28(7): 32-38.
[11] 张治俊,李辉,张煦,等.基于单/双同步坐标系的软件锁相环建模和仿真[J].电力系统保护与控制,2011,39(11): 138-144.
Internal Model Control of Permanent Magnet Synchronous Traction Machine Variable Frequency Drive System
LI Minghui
(XJ Schindler Elevator Co., Ltd., Xuchang 461000, China)
The permanent magnet synchronous traction machine was a typical nonlinear multi-variable coupled system, there was cross-coupling betweendqcurrents in synchronous-frame, thedqcurrents could not be decoupled by the traditional PI, a combination of high performance permanent magnet synchronous traction machine control method based on the intima of the control principle and space vector algorithm decoupling was proposed, the internal model control (IMC) was used to control an ideal motor decoupled model, which was designed to dynamic decoupling of the stator current cross-coupling potential, the system dynamic response performance was improved,the robustness of parameter uncertainties and disturbances in the current loops was satisfied, extra motor parameters and hardwares were not necessary in this method, the experimental results showed the feasibility and effectiveness.
permanent magnet synchronous traction machine (PMSTM); internal model control (IMC); decoupling; steady-state error; observer; space vector puls width modulation (SVPWM)
国家质检总局公益性行业科研专项资助项目(G2013709);河南省博士后研发基地资助项目(豫人社博管[2015]8号)
李明辉(1970—),男,高级工程师,研究方向为电梯驱动与控制。
TM 341
A
1673-6540(2017)07- 0071- 05
2016 -10 -21
