基于PXI总线架构的螺旋桨电子控制器便携仿真设备研究
2017-08-07常博博赵刚时培燕
常博博,赵刚,时培燕
(中国航空工业集团公司西安航空计算技术研究所,陕西西安,710065)
基于PXI总线架构的螺旋桨电子控制器便携仿真设备研究
常博博,赵刚,时培燕
(中国航空工业集团公司西安航空计算技术研究所,陕西西安,710065)
针对螺旋桨电子控制器研制、调试、外场试验、验收等要求,设计基于PXI总线架构的螺旋桨电子控制器便携仿真设备。本文以某型螺旋桨数控系统为对象,从架构设计、总体硬件接口设计、软件设计、仿真验证四个方面开展工作,结果表明所设计的便携仿真设备仿真结果正确,满足设计要求,具有工程应用价值。
螺旋桨系统;电子控制器
1 研究背景
涡桨发动机螺旋桨系统的主要作用为将发动机输出功率转化为飞机所需的拉力及功率。为了保证螺旋桨系统稳定可靠的运行,需设计螺旋桨控制系统。在开展螺旋桨系统数字电子控制器的研制、调试、外场试验、验收等过程中,仿真验证已成为必不可少的支撑手段,可有效地规避将控制器直接应用于被控设备所带来的高投入、高风险等因素。
2 便携仿真设备架构设计
基于PXI总线架构的便携仿真设备平台主要组成包括一台PXI总线机箱、一块PXI总线控制器及多块功能接口模块构成。PXI总线机箱主要安装PXI控制器及各种接口控制模块,主要实时完成接口测试、控制运算、通信等功能,多块功能接口模块主要完成螺旋桨电子控制器外围接口特性的调理。
对于本螺旋桨电子控制器便携仿真设备,除上述PXI架构所必需的组成外,增加了信号调理箱,其主要目的为模拟电子控制器接口中的电磁阀等大功率负载。螺旋桨电子控制器便携仿真设备主要架构组成如图1所示。
螺旋桨电子控制器便携仿真设备主要组成包括硬件组成和软件组成两部分。硬件组成完成接口信号模拟、调理、运算,执行机构的模拟、负载系统的模拟等功能。软件主要完成系统自动测试、手动测试、仿真验证等工作。在总体架构设计完成的基础上首先建立螺旋桨电子控制器的硬件接口测试环境,并模拟控制器各类需求信号;其次在仿真平台搭建完成的前提下,实现螺旋桨系统仿真功能的验证。
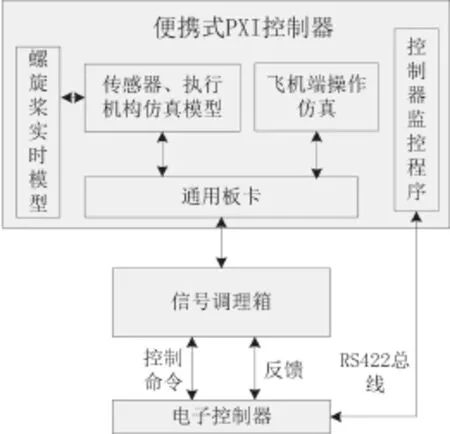
图1 螺旋桨电子控制器便携式硬件在环仿真平台结构图
3 便携仿真设备硬件平台组成
对于本文研究的螺旋桨仿真平台,主要包括飞控端和螺旋桨端信号的模拟。硬件平台主要包括信号PXI系统组成、信号模拟系统、执行机构模拟系统组成。
3.1 PXI控制器
PXI控制器采用PXI-3950,用于整个便携仿真设备的综合控制运算。
3.2 信号模拟系统
3.2.1 转速信号模拟
转速信号为频率和幅值变化的高频正弦信号,由螺旋桨模型实时计算并将转速值输出转换为控制器可识别的正弦信号,转速信号的频率值大小随转速增大而增加。频率信号通过DDS技术实现,采用FPGA加DA控制输出。
3.2.2 扭矩信号模拟
扭矩信号也为频率和幅值变化的高频正弦信号,模型根据螺旋桨功率和转速等参数计算对应的扭矩值,并转换为电子控制器可识别的正弦信号,转速信号的频率值大小随转速增大而增加,最终频率信号通过DDS技术实现,采用FPGA加DA控制输出。
3.2.3 桨叶角LVDT信号
螺旋桨桨叶角通过LVDT传感器,工作方式为六线制。LVDT采用CPCI-75DL1模拟卡实现。
3.3 执行机构模拟
执行机构为桨距控制器伺服电磁阀,控制电流-40mA~40mA,通过模拟负载匹配电磁阀阻抗实现。同时通过PXI-6251实现负载电压的采集运算。
4 便携仿真设备软件设计
4.1 软件架构设计
仿真软件采用NI公司的Labwinds/CVI平台开发。仿真软件包括测试软件和仿真软件两部分组成。测试软件完成控制器接口手动、自动测试,仿真软件完成电子控制器硬件在回路仿真验证功能。仿真软件具备系统自检、控制功能运算、任务调度、人机界面、数据保存和系统服务等功能。
4.2 软件组成及功能要求
4.2.1 测试软件
测试软件应能完成电子控制器所有接口信号的手动、自动测试,通过手动/自动输入或输出实现电子控制器的单路信号测试,主要用于控制器调试、验收等工作。
4.2.2 仿真软件
仿真软件完成电子控制器硬件在回路仿真验证功能。该软件内嵌螺旋桨实时数学模型及执行机构模型软件,实现螺旋桨在不同工作状态下的功能性能仿真验证。该仿真软件调用周期为20ms。
4.2.2.1 螺旋桨实时数学模型
螺旋桨实时数学模型是进行电子控制器硬件在回路仿真的核心组成部分,模型实时计算控控制器所需的信号大小,仿真设备将数值信号转换为电子控制器所需的电信号,最后通过信号调理箱输入给螺旋桨电子控制器。螺旋桨实时数学模型包括螺旋桨起动过程模型、稳态运行非线性实时数学模型、停车过程模型。根据螺旋桨工作的条件,本文所建立的螺旋桨模型对外输入参数为:高度(ALTP)、马赫数(AM)、桨叶角(Beta)、需求功率(HpExt)、转速(XNDP)等,实际输出参数包括螺旋桨转速(NP)、扭矩(TQ)等参数信息。
4.2.2.2 桨距执行机构模型
螺旋桨桨叶角变化主要通过桨距控制电液伺服阀。电子控制器根据输入参数值,实时计算相应的控制输出指令,将电流信号输出给电液伺服阀,电液伺服阀控制角度变化大小。本文通过桨距控制器工作特性,建立伺服阀电流与角度变化关系方程,即Δβ=f(PCU_I)。Δβ为桨叶角变化量,PCU_I为伺服阀电流。
5 仿真验证
本文以某螺旋桨数字电子控制系统为研究对象,进行该型螺旋桨硬件在回路仿真的验证。仿真功能主要包括慢车、起飞、爬升等状态验证,最终获得螺旋桨全过程的仿真结果,其中典型阶段仿真结果如图2和图3所示。

图2 全状态下转速仿真结果
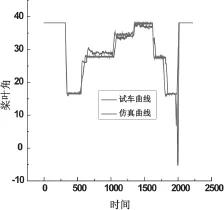
图3 全状态下桨叶角仿真结果
通过仿真验证,表明硬件在回路仿真数据计算准确,能够有效的进行螺旋桨系统和电子控制器软硬件功能性能的综合验证。该系统的建立为开展螺旋桨全权限数字控制系统进一步的分析、设计、研制和验证提供了很好的试验平台。
6 总结
本文针对国内目前螺旋桨数字控制仿真系统的不足,利用已有的软硬件资源,建立了基于PXI架构的螺旋桨系统便携仿真设备。将螺旋桨数学模型、信号模拟与处理、执行机构等部分独立设计,能够实现螺旋桨系统的硬件在回路仿真,有利于螺旋桨数字电子控制器的研制开发,缩短开发周期,具有良好的工程实用性,可以为螺旋桨数字式电子控制系统设计与仿真提供支持。
[1]李迎.基于PXI的实时仿真测试系统构建技术研究[J].计算技术与自动化,2013年12月.
[2]王超,杨恒辉.便携式APU数控系统硬件在环仿真平台研究[J].计算机测量与控制.2016.04.
Research on Portable Simulation Device of Propeller Electronic Controller Based on PXI Bus Architecture
Chang Bobo,Zhao Gang,Shi Peiyan
(AVIC Xi’an Aeronautics Computing Techinque Research Institute,Xi’an Shaanxi,710065)
Aiming at the requirements of the development and debugging of the propeller electronic controller,the portable simulation equipment based on the PXI bus architecture is designed In this paper,a kind of propeller coantrol system is designed ,which is based on the architecture design,the overall hardware interface design ,the software design and the simulation verification.The result show that thedesigned simulation results are correct,meet the designed requirments and have the engineering application value
propeller system;electronic controller
