基于CC2630辅助定位的飞行控制器设计
2017-08-07贾霄强梁斌李其豪于秋芳
贾霄强,梁斌,李其豪,于秋芳
(天津师范大学电子与通信工程学院,天津,300387)
基于CC2630辅助定位的飞行控制器设计
贾霄强,梁斌,李其豪,于秋芳
(天津师范大学电子与通信工程学院,天津,300387)
针对小型航模飞机在低空小区域进行飞行训练时,需要较高精度的位置信息作为辅助。设计了基于CC2630辅助定位的飞行控制器。该控制器其能够采集三轴陀螺仪、三轴加速度、地磁信息、海拔高度、GPS位置信息等,利用RSSI算法进行位置计算,实现了较高精度的位置输出。
陀螺仪;加速度;地磁信息;CC2630
0 引言
小型固定翼航模飞机或小型四轴飞行器,在低空小区域起飞、降落和飞行训练时,需要较高精度的定位数据。而GPS信号容易受到干扰,同时其定位精度在10m量级,误差较大。不能满足我们在有限的空间里进行安全的飞行训练,故我们依托于ZigBee网络定位技术,利用CC2630芯片设计了机载飞行控制器。
1 飞行控制器整体设计
飞行控制器主要由主控芯片CC2630及其外围电路、电源管理单元、九轴磁力传感器BMX055、温湿度气压传感器BME280、GPS+北斗+GPRS模块HLK-GS2503和存储器组成,将采集到多种信息进行解析和融合后给出PWM驱动信号,提供给电调驱动电机或舵机。其整体架构如图1所示。
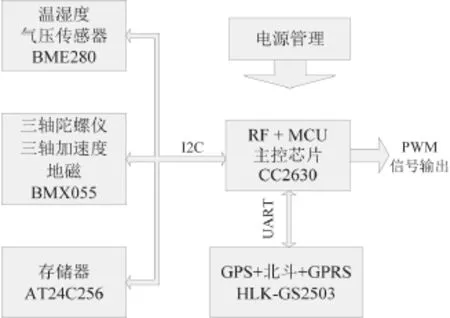
图1 飞行控制器整体架构图
其温湿度气压传感器和九轴磁力传感器是由I2C串行总线进行地址分配和数据读取的,总线速率为400KHz。GPS模块直接通过串口和主控芯片的UART单元连接,完成命令写入和定位信息读取。
2 控制器硬件单元设计
主控单元由TI公司生产的CC2630及其外围电路构成。它含有一个32位ARM® Cortex®-M3内核、48MHz的时钟速度、128KB系统内可编程闪存、28KB系统SRAM、四个通用定时器、8路200MSPS速率的12位模数转换器、UART接口、I2C接口、实时时钟等外设功能。
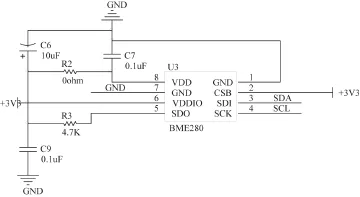
图2 温湿度气压传感器BME280电路原理图
温湿度气压传感器BME280电路原理如图2所示,它和CC2630的硬件I2C接口相连,其SDA引脚为数据端,SCL引脚为时钟端。VDDIO引脚为数字电源,连接C9为0.1uF退耦电容,保证芯片不受电源电压波动的影响。VDD引脚为模拟电源,除了链接C7为0.1uF电容外还接入了0欧姆电阻R2,将其视为电感的作用,抑制该引脚的电流波动。
九轴磁力传感器BMX055电路原理如图3所示。它也和CC2630的硬件I2C接口相连,其11脚SDx为数据端,第9脚SCx为时钟端。第13脚VDDIO为数字电源,连接C10为0.1uF退耦电容,保证芯片不受电源电压波动的影响。第3脚VDD为模拟电源,除了链接C4为0.1uF电容外还接入了0欧姆电阻R1,将其视为电感的作用,抑制该引脚的电流波动。
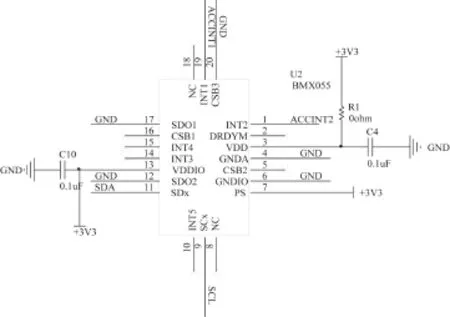
图3 九轴磁力传感器BMX055电路原理图
3 软件设计
基于CC2630辅助定位的飞行控制器,在ZigBee定位网络里属于协调器节点,需要地面区域内多个路由节点与其通信的信号强度来计算出相对位置,其运行工作流程如图4所示。
4 测试数据及结论
飞行控制器实现了对陀螺仪、加速度、地磁信号的采集,能根据这些数据提供可用的PWM信号。
在ZigBee网络位置确定过程中,是单独做的测试。将6支路由节点以20m的距离分布在一个矩形区域内。人为移动协调器节点,观察显示器上输出的计算位置增量信息和实际的物理位置变化信息进行对比,如表1所示。

图4 飞行控制器软件流程图
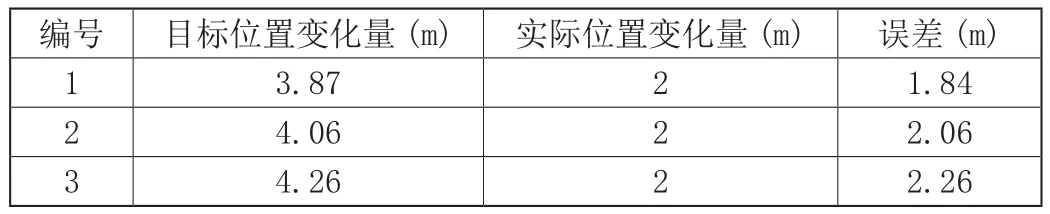
表1 位置变化数据表
根据测试数据,该设备的定位误差平均值在2米左右,实现了设计目标。
[1] TI.CC2630 User’s Guide[R/OL].[2016-07].http:// www.ti.com.cn/cn/lit/ds/symlink/cc2630.pdf.
Design of flight controller based on CC2630 aided positioning
Jia Xiaoqiang,Liang Bin,Li Qihao,Yu Qiufang
(School of electronic and communication engineering, Tianjin Normal University, Tianjin,300387)
In order to carry out the flight training of small model aircraft in low altitude area, it is necessary to use high precision position information as an aid A flight controller based on CC2630 aided positioning is designed. The controller can collect three axis gyro, the acceleration of the three axis, the geomagnetic information, the altitude, the GPS position information and so on. The RSSI algorithm is used to calculate the position
gyroscope; acceleration; geomagnetic information; CC2630
大学生创新创业训练计划项目(201510065036 )。
