格网地形扫描中扫描点分布密度研究
2017-08-07邓岳川
邓岳川
滁州学院地理信息与旅游学院,滁州,239000
格网地形扫描中扫描点分布密度研究
邓岳川
滁州学院地理信息与旅游学院,滁州,239000
格网地形扫描是一种自动化地形测绘技术,可通过设置合理格网参数来控制扫描点的分布密度和数量,而研究扫描点的分布密度与格网参数之间的关系是该技术应用中的关键问题之一,针对此类问题的研究却相对较少。借助测量机器人,运用格网扫描技术获取指定测区的地形数据,再通过内业处理分析扫描点的分布密度,最终构建出格网参数与扫描点分布密度的函数关系。结果表明:在格网单元位置、测站位置确定的情况下,格网参数与扫描点分布密度存在对应的函数关系。
格网地形扫描;分布密度;格网参数设置;地形测绘
1 相关研究与问题提出
基于格网扫描的地形测绘技术,即格网地形扫描,它运用带有自动跟踪、自动照准功能的测量机器人[1],设定格网扫描参数,完成格网单元内的地形特征点的自动化采集,获取测区地形数据。该技术可实现地形测绘的自动化作业,是地形测绘技术重要的发展方向之一。目前,地形测绘技术较为成熟,主要包括RTK、全站仪测量,无人机航空测量,以及三维激光扫描测量等。薛选宁等采用全站仪、GPS-RTK等仪器,完成了数字地形测量工作[2-3];袁修孝采用自行研发的GPS辅助轻型飞机低空航摄系统完成宜城测区地形测图工作,完全满足平地1∶500航测地形测图的精度要求[4];廖亚分析无人机航空摄影测量技术在绘制大尺度地形图的应用前景[5-6];郭琳娜等详细说明应用地面三维激光扫描技术实现地形测绘的方法和流程,并归纳了该技术用于地形测绘中需要解决的问题[5,7]。
但是,这些技术在应用中也存在诸多问题,例如,RTK、全站仪地形测量属于单点接触式测量,作业流程简单,但作业效率较低;无人机航空摄影地形测量可对测区目标进行非接触式测量,但对于有危险或难度大的地区较难实现;三维激光扫描测量不需要与被测目标接触,可进行有危险、难度大的地区的地形测绘,但内业处理较为复杂。
格网地形扫描技术,是一种较为经济可行的解决方案,作业流程与全站仪、RTK地形测量类似,数据采集与三维激光扫描测量类似,数据处理则采用Cass、ArcGIS等成熟软件,处理方法和流程较为成熟,易于掌握。本文探讨格网扫描过程中的扫描点分布密度、数量与格网参数之间的关系,掌控扫描过程,控制扫描的地形点密度[8]等指标,解决应用中的关键性技术问题。
2 格网地形扫描技术
2.1 作业流程
格网地形扫描的作业流程如图1所示。
第一,方案设计。结合测区地形特点,设计作业方案,包括作业设备、作业人员和作业计划等。第二,格网设计。结合作业方案和测区地形,将测区划分出若干格网单元,设计格网单元的尺寸、数量和重叠度。第三,格网扫描。根据格网单元的尺寸、数量,选取适合的测站点,架设测量机器人,通过设置格网参数,完成格网单元内的地形特征点的扫描。第四,内业处理。将扫描数据经格式转换后,导入Cass等制图软件,制作相应的成果图件。第五,成果检核。按照测量规范,对成果进行检查、评定精度,查找问题和错误,对不符合要求的数据进行补测和返工。最后,对满足要求的成果进行入库,再进行深加工,制作三维地形模型或DEM等产品或通过绘图仪输出成果图件。从工作流程可以看出,格网扫描是整个流程中的重要环节,其中的设定格网参数是关键步骤,直接决定了扫描点的分布密度、数量,进而影响成果图件的精度、作业效率等指标。本文将研究扫描点的分布密度与格网参数之间的关系。

图1 格网地形扫描的作业流程
2.2 格网扫描过程
格网扫描借助测量机器人的格网扫描程序实现,具体过程如图2所示。

图2 格网扫描过程
安置好测量机器人,启动格网扫描程序。首先,设置格网扫描模式。通过指定三四个边界点,确定格网单元,通常分为三点区域、四点区域和四点矩形等。这三种模式定义方式不同,但扫描过程一致。其次,确定格网边界。边界点可以通过输入已知坐标确定,也可以通过实测来确定。再次,设置格网参数。在行间隔和列间隔中设置具体的数值,控制逐行逐列扫描的点数和间距大小。最后,格网扫描。测量机器人根据设定的格网范围和扫描参数,自动完成格网内的地形特征点采集。过程如图3。
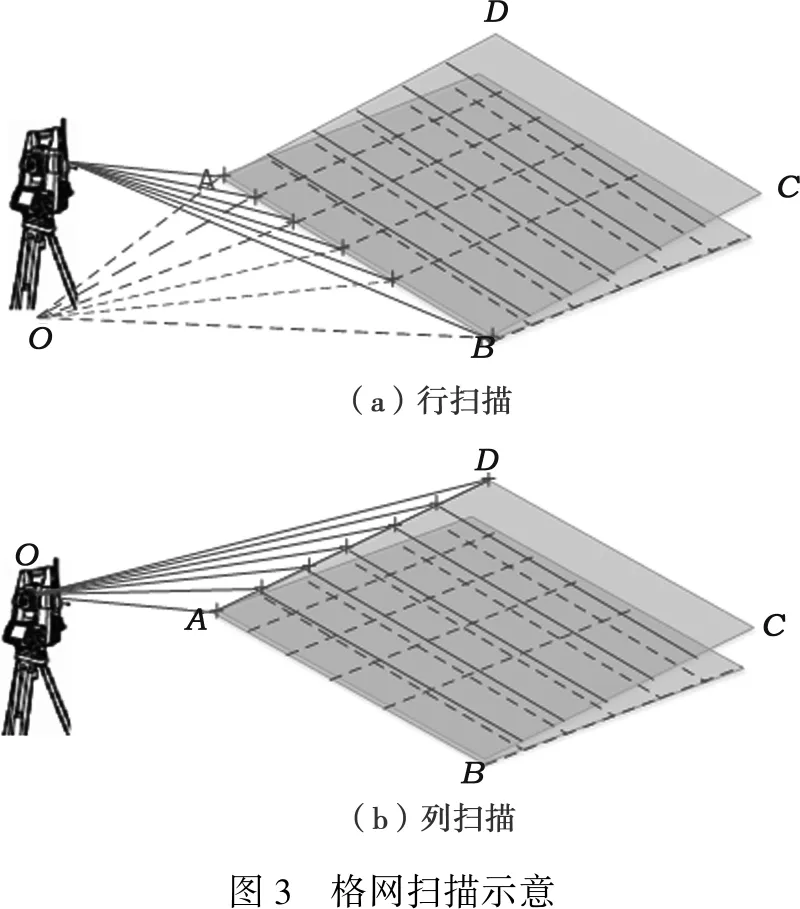
图3 格网扫描示意
扫描过程可分解为行扫描和列扫描。行扫描(图3a),以测站点O和测区左右边界点A、B构成的水平角∠AOB为参考,根据设置的行间隔m,将∠AOB等分m-1份,假设∠AOB的角值为βAOB,则βAOB可以表示OB边的方位角与OA边的方位角之差,因OA和OB是格网最外围的边界,它们的方位角是该测站所有目标点方位角中的最大值和最小值,即:
βAOB=βOB-βOA=βmax-βmin
(1)
βmax、βmin可通过边界点A、B的坐标与测站O的坐标反算获得,即:
(2)
则行间隔角i可表示为:
(3)
测量机器人控制照准部从OA边开始,依次水平转动行间隔角i,直至OB边结束。
列扫描(图3b),以照准部中心O和测区上下边界点A、D构成的垂直角∠AOD为参考,根据设置的列间隔n,将∠AOD等分n-1份,假设∠AOD的角值为αAOD,则αAOD可以表示OA边的垂直角与OD边的垂直角之差。因OA和OD是格网最外围的边界,它们构成的垂直角是该测站目标点垂直角中的最大值和最小值,即:
αAOD=αOA-αOD=αmax-αmin
(4)
而αmax、αmin可根据三角高程测量公式,采用仪器高、目标点高差、OA、OD水平距离和反正切函数求得,即:
(5)
因格网扫描使用免棱镜模式,故目标高v为0,将式(5)进行变换,可得:
(6)
其中,i表示仪器高,hOA、hOD表示测站至目标点高差,则列间隔角j表示为:
(7)
测量机器人控制照准部从OD边开始,依次垂直转动列间隔角j,直至OA边结束;扫描过程中,测量机器人控制照准部依次转动固定角度,完成测区地形特征点采集,并形成三维坐标点数据。
3 格网地形扫描实例
从上述扫描过程分析可以看出,扫描点的分布密度与格网参数、测站点位置、行间隔角、列间隔角等存在对应关系。为探讨这种内在关系,本文选取某块区域,采用格网扫描完成该区域的地形特征点采集,再采用Cass软件对扫描点、测站点等位置信息进行制图和分析,推导其函数关系。
3.1 测区概况
测区位于某校区内,地形起伏总体不大,表面有低矮灌木和草坪覆盖,测站点位于测区边缘,通视性较好。测区内含有不同起伏度的地表区域,包括平地、草地、斜坡和陡坎等。测区范围位于学校逸夫教学楼和行政楼之间西侧山坡,13和14栋宿舍楼西南测山坡和山上操场。
3.2 扫描过程
首先,将测量机器人架设在测站上对中整平(因本次实验不需要地形点的绝对位置,采用假定坐标系统)。其次,设置扫描模式,为方便对比,分别使用三点区域和四点区域扫描模式。再次,定义格网单元边界,通过实测三四个测区边界点,获取边界点坐标,完成格网单元边界点的定义。第四,设置格网参数,本次实验将两种扫描模式的行间隔和列间隔定义为10×10。第五,启动格网扫描程序,测量机器人控制照准部在格网单元内完成地形特征点的扫描,再运用Cass软件展绘扫描点,如图4所示。
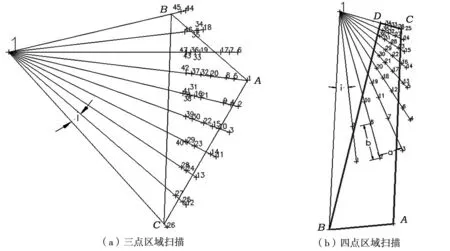
图4 格网扫描点分布
图4中,1代表测站点,A、B、C、D分别表示格网单元的边界点,其他坐标点表示扫描点,部分扫描点的原始测量数据(如水平角、垂直角、斜距等)如表1、表2所示。
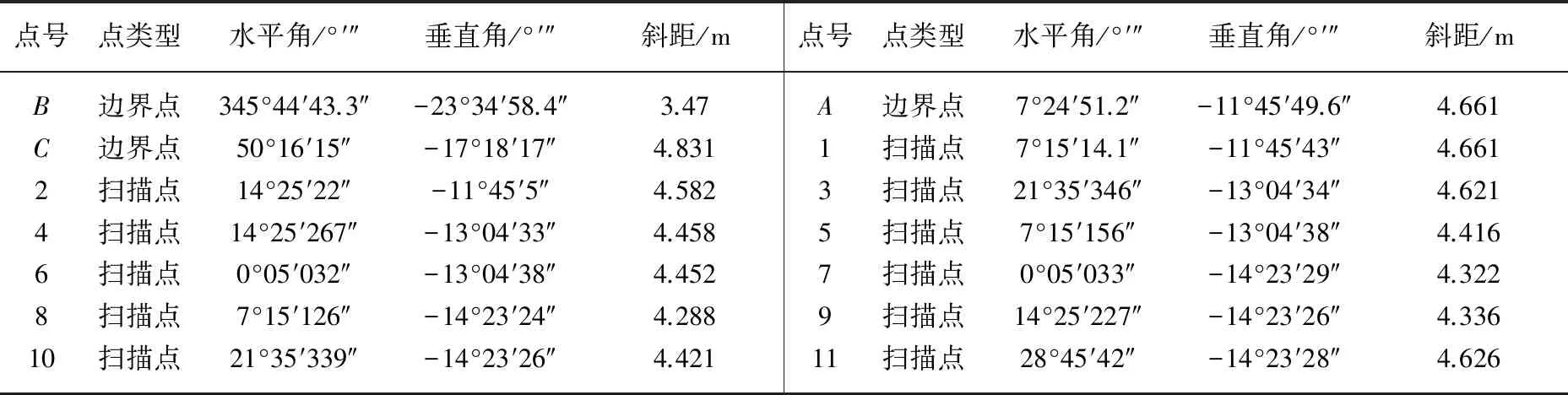
表1 三点区域扫描点测量数据
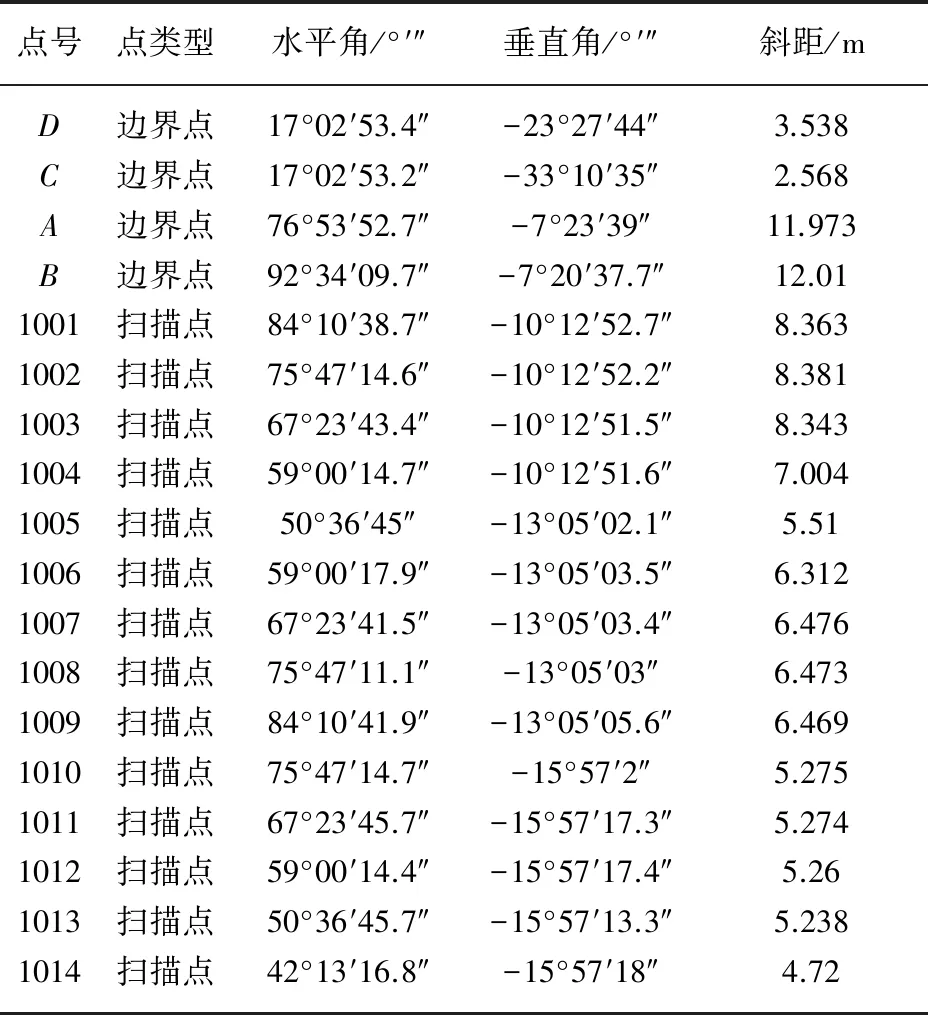
表2 四点区域扫描点测量数据
3.2.1 行间隔角
三点区域(图4a):将测站点1和边界点B、C的连线投影至水平面,形成水平角∠B1C,角度值为β,将其代入式(3),则行间隔角i为:

=7°10′10.2″
(8)
四点区域(图4b):将测站1和边界点B、C的连线投影至水平面,形成水平角∠B1C,角度值为β,将其代入式(3),则行间隔角i为:
=8°23′28.5″
(9)
3.2.2 列间隔角
三点区域:将测站点1和边界点B、A的连线投影至竖直面,形成夹角∠B1A,角度值为α,将其代入式(7),则列间隔角j为:

=1°18′47.6″
(10)
四点区域:将测站点1和边界点B、C的连线投影至竖直面,形成夹角∠B1C,角度值为β,将其代入式(7),则列间隔角j为:

=2°52′13.044″
(11)
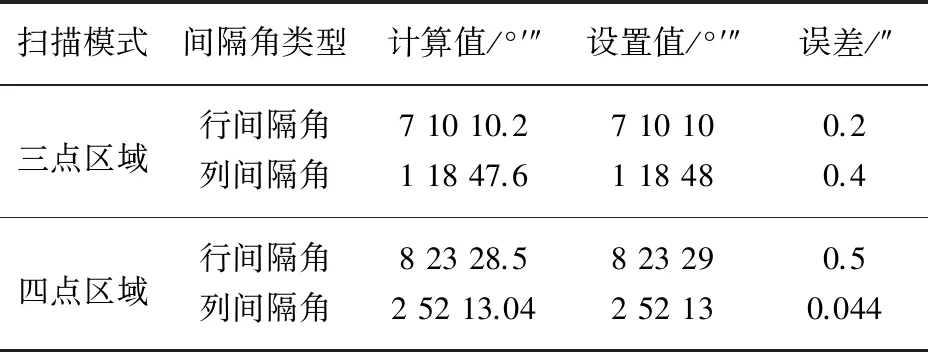
表3 扫描间隔角计算值与设置值对比
由表3可以看出,实测数据计算出的行间隔角与列间隔角与仪器设置值一致,误差均小于0.5″,说明式(3)和式(7)中的函数关系与实际相符。
3.2.3 扫描点分布密度
根据图4和表1、表2可以看出,扫描过程大致如下:照准部从距测站点最远端的测区边界点开始扫描,先保持垂直角不变,再控制照准部水平转动,依次增大或减小固定角度,即行间隔角i,当达到测区边界时,本行扫描停止,再控制照准部朝着测站点方向垂直转动,增大一固定角度,即列间隔角j,再开始下一行的扫描,直至距测站点最近端的边界点为止。如图5所示,扫描点分布密度可由扫描点的行间距a和列间距b来表示。

图5 扫描点间距
如图5a所示,在△O12中,根据余弦定理,行间距α可表示为:
(12)
由图5a可知,D1是O1的平距,D2是O2的平距,假设仪器高为i,测站点至目标点的高差为hoi,扫描点的垂直角为αv,由于格网扫描过程使用免棱镜模式,目标高v为0,根据三角高程测量公式[9],则Dl可表示为:
Dl=(hoi-i)cotαv
(13)
其中,下标l代表扫描的行号,因仪器高在架站后已确定,可以看作一固定常数,又因测区内邻近地形起伏具有连续性,故测站至相邻扫描点的高差变化不大,可以用hl代替hoi-i,因此式(13)可表示为:
Dl=hlcotαv
(14)
将式(3)和式(14)分别代入式(12),再将等式两边开平方得:

(15)
其中,αv∈{αmin,αmin+n,αmin+2n,…,αmax},m为行间隔数,n为列间隔数,l为扫描的行号。
如图5(b)所示,列间隔b可表示为:
b=O1-O2=(hol-i)cotα1-(ho2-i)cotα2
(16)
同理,可用hc代替hol-i,下标c表示扫描的列号,因此式(16)可表示为:
bc=O1-O2=hccotα1-hccotα2
(17)
在图5(b)中可以看出:
α2=α1+j
(18)
将式(18)、式(7)分别代入式(17),并用αv代替α1,可得:
(19)
其中,αv∈{αmin,αmin+n,αmin+2n,…,αmax},n为列间隔数,c表示扫描的列号。
综合式(15)和式(19),扫描点行间距和列间距可以表达为:
(20)
其中,αv∈{αmin,αmin+n,αmin+2n,…,αmax},m为行间隔数,n为列间隔数,l为扫描行号,c为扫描列号。
由式(20)可以看出,格网扫描点的间距与仪器高度、目标点高差、垂直角、水平角以及行间隔数、列间隔数等因素有关,实际扫描过程中,先确定测站点、边界点的位置,再通过式(2)和式(7)确定βmax、βmin、αmax和αmin,而仪器高度在架站时已确定,可看作固定常数,测区邻近地形起伏具有连续性,hl在行扫描中可看作常数,hc在列扫描中可看作常数,因此扫描点间距a、b与m、n存在对应的函数关系,通过设置合适的格网扫描参数m、n,即可有效控制扫描点的分布密度、数量,进而控制扫描作业的精度。
4 结束语
格网地形扫描是地形测绘中一种切实可行的技术方案,既实现了作业过程的自动化,又保留了成熟的作业流程,在作业成本和作业效率之间找到了平衡。本文研究的扫描点分布密度与格网参数之间的关系,为实际作业中如何设置格网参数,控制扫描点的分布范围、数量等提供了合理依据,解决了格网地形扫描中的关键性技术问题,为格网地形扫描技术的应用提供有力支持。后续将在格网单元划分、内业处理方面开展深入研究,为格网地形扫描技术的应用提供技术解决方案。
[1]张正禄.测量机器人[J].测绘通报,2001,32(5):17
[2]薛选宁.浅析数字地形测量中的野外数据采集[J] .陕西煤炭,2007(3):20-22
[3]王大鹏.基于数字地形测量的GPS-RTK技术应用分析[J].地理空间信息,2009,7(1):14-15
[4]袁修孝,高宇,邹小容. GPS辅助空中三角测量在低空航测大比例尺地形测图中的应用[J]. 武汉大学学报:信息科学版,2012,37(11):1289-1293
[5]廖亚.无人机航空摄影测量技术在地形测绘中的应用对策[J].城市地理,2015(18):109-110
[6]吴智勇.无人机航空摄影测量技术在地形测绘中的应用探析[J].工程与建设,2016,30(1):36-37
[7]梅文胜,周燕芳,周俊.基于地面三维激光扫描的精细地形测绘[J].测绘通报,2010(1):53-56
[8]中华人民共和国国家质量监督检验检疫总局.GB/T14912-2005 1:500 1:1000 1:2000外业数字测图技术规程[S].北京:中国标准出版社,2005
(责任编辑:汪材印)
10.3969/j.issn.1673-2006.2017.05.029
2017-02-16
安徽省高校自然科学研究一般项目“格网扫描技术在精细地形测绘中的应用研究”(KJ2015B05)。
邓岳川(1978-),安徽铜陵人,硕士,讲师,研究方向:工程测量。
TP217
:A
:1673-2006(2017)05-0102-05
