平台式航空/海洋重力仪精密温度控制研究
2017-08-07刘东斌胡平华宋毅龙许东欢苗成义陈晓华
刘东斌,胡平华,宋毅龙,许东欢,苗成义,陈晓华
(1.北京自动化控制设备研究所,北京 100074; 2.青岛航天半导体研究所有限公司,青岛 266071;3.上海航天控制技术研究所,上海 200233)
平台式航空/海洋重力仪精密温度控制研究
刘东斌1,胡平华1,宋毅龙2,许东欢3,苗成义1,陈晓华1
(1.北京自动化控制设备研究所,北京 100074; 2.青岛航天半导体研究所有限公司,青岛 266071;3.上海航天控制技术研究所,上海 200233)
以平台式航空/海洋重力仪为基础,为降低温度变化对其惯性器件尤其是重力敏感器的影响,保证重力测量的精度,设计了一种三级五路结构的高精度温度控制系统。以包含核心惯性器件的第三级温控为例,重点分析了温控对象的建模、非线性PI控制器的设计等问题,并进行了仿真分析和高低温环境下的试验验证,结果表明,在-10℃~+45℃温度范围内3个温控通道的温度变化量和温度稳定性均小于0.01℃,达到了重力仪的温度控制精度要求,为重力仪实现高精度重力测量提供了有利的温度条件。
航空/海洋重力仪;重力敏感器;温度控制;非线性PI控制
0 引言
航空/海洋重力仪在进行重力测量作业时,由于测量载体、气候环境的不同,其工作环境温度差异会比较大,而平台式航空/海洋重力仪(以下简称重力仪)所用的惯性器件,例如动力调谐陀螺、石英挠性加速度计都对温度比较敏感,尤其是作为重力敏感器使用的垂向石英挠性加速度计,由于测量精度要求非常高,对温度环境要求更高,通常要求温度稳定性要高于0.02℃。因此,为确保重力仪的测量精度和测量稳定性,必须为核心惯性器件设计高精度的温度控制系统[1]。加拿大山德尔地球物理公司(Sander Geophysics Limited,SGL)研制的AIRGrav重力仪的温控精度在0.02℃,动态重力测量精度达到了0.2 mGal[2-3];国防科学技术大学研制的首台捷联式航空重力仪温控精度也达到了0.02℃[3],国内其他科研单位也在重力仪精密温控系统方面开展了大量的研究工作并取得了很好的成果[4-8]。
为了满足在宽温度条件(-10℃~+45℃)下的高精度温度控制要求,本文设计了一种三级五路的重力仪温控系统,分别对重力仪的壳体、框架、平台台体、陀螺以及重力敏感器进行精密温度控制,通过仿真分析和试验测试,验证了该温度控制系统能够为重力仪系统内部各惯性器件提供良好的温度环境,有效提升了重力测量的精度和稳定性。
1 组成及工作原理
重力仪主机的外形如图1所示,重力仪稳定平台的组成结构如图2所示。
重力仪温控系统从外至内分为三级,第一级为平台壳体,主要用于重力仪平台与外部环境的隔热与散热,以及为内部两级温控提供相对稳定的温度环境,综合考虑重力仪的工作环境温度及内部温控通道的散热需求,经试验测试,将该温控点设置为47℃;第二级为平台框架,用于进一步提升和改善平台台体、陀螺以及重力敏感器的工作环境温度条件,经试验测试,将该温控点设置为62℃;第三级包括平台台体、陀螺以及重力敏感器3个温控通道,由于平台台体、陀螺和重力敏感器在结构上比较紧密,各通道之间的温度耦合比较严重,因此,在设计时需要保证3个通道的温控点相差不能太大,经反复测试分析,最终将平台台体的温控点设置为74.5℃,陀螺的温控点设置为75℃,重力敏感器的温控点设置为76℃。
为了保证加温的快速性和对外部环境的适应性,重力仪第一级和第二级温控采用115V交流加温;在内部第三级温控通道,平台台体和陀螺温控采用45V直流加温,重力敏感器温控采用13V直流加温,尽量减小各温控通道电磁干扰对重力敏感器输出的影响。
控制算法设计上,重力仪三级五路温控均采用非线性PI控制算法,进一步提高重力仪温控系统的快速性和温控精度。本文以重力仪第三级的三路温控通道为例,着重分析重力仪系统的精密温度控制设计。
2 温控对象建模
由于平台台体、陀螺和重力敏感器之间存在一定程度的温度耦合现象,无法单独对每一路温控对象建立精确的数学模型,因此考虑采用实验的方法辨识得到平台台体、陀螺和重力敏感器的温控模型。
以平台台体为例,其温控对象模型辨识方法为:根据重力仪实际工作时平台台体的环境温度(也就是重力仪第二级温控的温度点62℃)和该通道的温控目标温度74.5℃,计算得到平台台体的工作温升,通过实验的方法测得使平台台体产生该工作温升所需的加温电压。待环境温度重新稳定到62℃后,对平台台体施加该加温电压(此时,陀螺和重力敏感器不需要通电运行),实时记录平台台体、陀螺和重力敏感器3个通道的温度监测值,直到各温控对象的温度趋于稳定。用同样的方法对陀螺、重力敏感器2个通道进行加温测试并记录相应的温升曲线。实验得到的温升曲线如图3~图5所示。
利用MATLAB对实验得到的9条曲线进行输入输出拟合,并计算相应的传递函数,可以辨识得到平台台体、陀螺和重力敏感器3个通道温控对象的频域模型如式(1)所示:
(1)
其中,y为各通道温升值,单位为℃,u为各通道温控功率,温控功率值与温控电压的平方成正比,G(s)为3个通道温控对象的传递函数,s为Laplace算子;ytt为平台台体的温升值,ycb为重力敏感器的温升值,ytl为陀螺的温升值;utt为平台台体的温控功率,ucb为重力敏感器的温控功率,utl为陀螺的温控功率。
3 控制器设计及仿真分析
针对重力仪平台台体、陀螺和重力敏感器三路温控通道存在温度耦合的特点,利用非线性PI的方法设计各通道的温度控制器。当温度偏差的绝对值大于设定的阈值时,采用比例控制,保证温控系统有较好的快速性,又避免引入过大的超调量;当温度偏差的绝对值小于阈值时,引入积分环节,消除温控系统的静差,提高各通道的温控精度和稳定性。
各通道温控系统的非线性PI控制器设计如下:
(2)
其中,T为目标温度值,y(t)为t时刻实测温度值,e(t)为t时刻温度偏差值,z(t)为t时刻温度偏差的积分值,ε为引入积分环节的偏差阈值,zmax为积分饱和上限,kp为温控比例系数,ki为温控积分系数,u(t)为t时刻温控功率,umax为温控功率上限(根据各通道可提供的最大加温电压确定),uout(t)为t时刻实际输出的温控功率,v(t)为t时刻实际输出的加温电压。
利用MATLAB建立重力仪平台台体、陀螺和重力敏感器三路温控通道的仿真模型,如图6~图10所示。其中,仿真模型子系统1为各通道温度输出及监测模块;仿真模型子系统2为各通道控制电压转换、输出及监测模块;仿真模型子系统3为各通道非线性PI控制器实现模块;仿真模型子系统4为各通道的温控对象模型。
经仿真调试,得到平台台体、陀螺和重力敏感器三路温控通道的主要控制器参数如表1所示。

平台台体陀螺重力敏感器kp1675.6551036.996471.517ki6.01.20.2ε0.40.40.5zmax20252025169umax20252025169
仿真结果如图11所示。从仿真结果来看,重力仪平台台体、陀螺和重力敏感器三路温控通道的控制效果较好,各通道温度均能快速稳定到设定的目标温度值,可以满足重力仪的使用要求。
4 试验验证
在重力仪系统上对设计的平台台体、陀螺和重力敏感器的温度控制器进行试验验证,用C语言在DSP中实现三路控制器,实时监测各通道的温度并输出到测试计算机,图12所示为常温下平台台体、陀螺和重力敏感器的温控曲线。
从图12可以看出,各通道的温控效果与之前的仿真结果近似,各通道均能较快地达到目标温度值,稳态精度较高,平台台体、重力敏感器2个通道的温控超调量很小,而由于平台台体、重力敏感器的温升对陀螺通道有一定的耦合影响,陀螺通道的超调量略大,但也能够满足重力仪系统的实际使用需求。各通道达到温度稳定后的温度输出曲线如图13~图15所示。
经过计算可知,常温条件下平台台体、陀螺和重力敏感器3个通道实际达到的温控精度如表2所示。
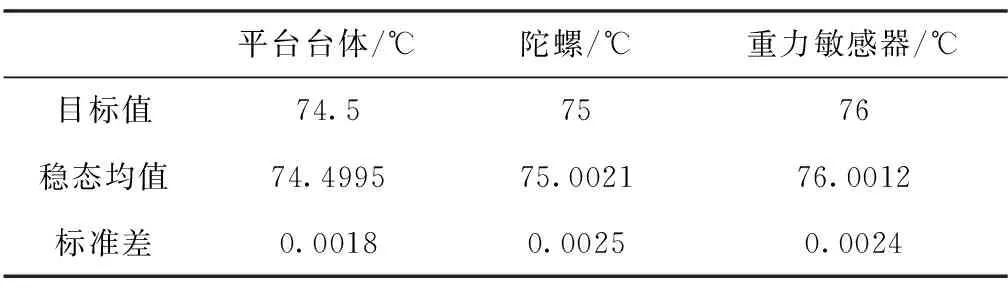
表2 平台台体、陀螺和重力敏感器的温控精度
由表2可见,常温条件下,平台台体、陀螺和重力敏感器的温控温度稳定性均优于0.01℃。
在-10℃环境温度条件下对重力仪温控系统进行试验,监测平台台体、陀螺和重力敏感器的温度输出结果如图16所示。
在-10℃环境温度条件下,各通道达到温度稳定后的温度输出曲线如图17~图19所示。
经过计算可知,重力仪系统在-10℃环境条件下,平台台体、陀螺和重力敏感器实际达到的温控精度如表3所示。

平台台体/℃陀螺/℃重力敏感器/℃目标值74.57576稳态均值74.503874.998176.0032标准差0.00330.00350.0029
由表3可见,低温条件下,平台台体、陀螺和重力敏感器的温控温度稳定性均优于0.01℃。
在+45℃环境温度条件下对重力仪温控系统进行试验,监测平台台体、陀螺和重力敏感器的温度输出结果如图20所示。
在+45℃环境温度条件下,各通道达到温度稳定后的温度输出曲线如图21~图23所示。
经过计算可知,重力仪系统在+45℃环境条件下,平台台体、陀螺和重力敏感器实际达到的温控精度如表4所示。
由表4可见,高温条件下,平台台体、陀螺和重力敏感器的温控温度稳定性均优于0.01℃。

表4 在+45℃条件下3个通道的温控精度
由表2~表4可知,重力仪环境温度在-10℃~+45℃范围内变化时,其平台台体、陀螺和重力敏感器的温控温度变化量最大分别为0.0043℃、 0.0045℃、0.0020℃,均能够满足重力仪优于0.01℃的指标要求。
5 结论
本文通过对温控对象进行实际测试的方法建立其温控模型,并采用非线性PI控制方法设计控制器,经数字仿真和实物试验表明,在-10℃~+45℃的温度范围内,3个通道的温控温度变化量和温控温度稳定性均小于0.01℃,达到了重力仪的温度控制精度要求。这也表明本文所采用的模型辨识方法和温度控制器设计方法切实可行,所设计的温度控制系统为保障重力仪的重力测量精度创造了有利的温度条件。
[1] 熊盛青,周锡华,郭志宏,等.航空重力勘探理论方法及应用[M].北京:地质出版社,2010.
[2] Sander S,Argyle M,Elieff S,et al.The AIRGrav airborne gravity system[C]//ASEG-PESA Airborne Gravity 2004 Workship:Geoscience Australia Record, 2004:49-54.
[3] AIRGrav Airborne gravity[EB/OL].http://www. sgl.com/gravity.htm.
[4] 李纪莲,张玘,张开东.航空重力测量比力温控系统热优化设计[J].中国惯性技术学报,2013,21(2):155-158.
[5] 吴艳霞,胡国庆,蒋幼华,等.高精度重力仪的恒温控制系统 [J].大地测量与地球动力学,2008,28(5):133-135.
[6] 余瑶,钟宜生.加速度计组合件高精度两级鲁棒温度控制[J].航空学报,2009,30(6):1103-1108.
[7] 王伟,高维,李城锁,等.重力梯度仪平台双向温控设计[J].物探与化探,2015,39(S1):17-21.
[8] 郭纬川,马杰,楚贤,等.重力仪散热装置的热仿真分析[J].导航定位与授时,2015,2(2):63-66.
Research on High-Accuracy Temperature Control for Airborne/Marine Gravimeter Based on Inertial Stabilized Platform
LIU Dong-bin1, HU Ping-hua1, SONG Yi-long2, XU Dong-huan3, MIAO Cheng-yi1, CHEN Xiao-hua1
(1.Beijing Institute of Automatic Control Equipment, Beijing 100074,China;2.Qingdao Aerospace Semiconductor Research Institute Co.Ltd., Qingdao 266071,China;3.Shanghai Aerospace Control Technology Institute,Shanghai 200233,China)
In the airborne/marine gravimeter based on inertial stabilized platform, in order to reduce the influence of temperature change on inertial components, especially gravity sensor, a high-accuracy temperature control system with a structure of three-level and five-channel was designed to ensure the accuracy of gravity measurement.Taking the third level temperature control channel including core inertial components as an example, the modeling of temperature control object and the design of nonlinear PI controller were carefully analyzed.Simulation analysis and verification test in high and low temperature were also carried out.The results show that the temperature variation and the temperature stability of all three temperature control channels in the temperature range from -10℃ to +45℃ are better than 0.01℃, which meets the requirement of temperature control accuracy and provides a beneficial temperature condition for the gravimeter to realize high-precision gravity measurement.
Airborne/marine gravimeter; Gravity sensor; Temperature control; Nonlinear PI control
2016-04-15;
2017-06-18
国家自然科学基金重大科研仪器研制项目(41527803)
刘东斌(1983-),男,硕士,工程师,主要从事惯性技术、重力测量仪器方面的研究。E-mail: ldbliu@163.com
10.19306/j.cnki.2095-8110.2017.04.004
P223
A
2095-8110(2017)04-0029-07
