智能电压跟随制动装置的设计
2017-08-07王占友何琳
王占友何琳
(海军工程大学振动与噪声研究所船舶振动噪声重点实验室武汉430033)
智能电压跟随制动装置的设计
王占友何琳
(海军工程大学振动与噪声研究所船舶振动噪声重点实验室武汉430033)
电阻耗能制动在电机拖动系统有着广泛的应用。但在以电池供电的电机拖动系统中,供电系统的母线电压会随着电池电量的下降而下降,而电机拖动系统又具有宽电压范围工作的特性,从而导致定电压耗能制动控制系统不能很好地随着母线电压的下降及时起到控制母线电压骤升的作用。针对这种情况,论文提出了一种智能电压跟随制动方案,能够实时检测判断直流母线电压,动态跟踪母线电压的变化,及时调整耗能制动保护电压阈值,从而达到动态保护电机拖动系统的目的。结果表明,论文提出的智能电压跟随制动方案,能够有效解决定电压耗能制动控制系统存在的不足,在宽母线电压范围内能够很好地起到保护电机驱动系统的作用。
耗能制动;智能电压跟随;电机驱动器
Class NumberTP23
1 引言
现代电力电子技术获得了长足的发展,逆变器、伺服驱动器等在电机拖动系统中获得了广泛的应用,并且均配有制动系统[1~7]。电机驱动系统的供电一般分为两类,一类是恒定电压供电,例如市电220V和380V供电的电机拖动系统,这类系统的特点是供电电压恒定,电压波动不大;另一类是电池供电的电机驱动系统,这类系统的特点是供电的电压会由于电池能量的损耗逐渐降低,只有当电池的电压下降到一定程度时,驱动器才停止工作,而电机驱动器和电机可以在这个宽电压范围内正常工作[8~10]。在这两类系统中,电机均在电动机状态和发电机状态两种工作状态下切换,当拖动系统处于驱动状态时,电机工作在电动机状态,电能由电源流向电动机,当拖动系统处于制动状态时,电机工作在发电机状态,此时电能由电机流向驱动器,形成的回馈电流会通过驱动器开关管的吸收回路流向直流母线,如图1所示,对母线的支撑电容短时间内快速充电,电容的电荷快速增多,造成直流母线电压快速上升,如果不及时将过剩的电能释放掉,极有可能威胁电机控制器的安全,甚至烧毁电机控制器。
但目前市场上只有放电电压阈值恒定的耗能制动装置,当把这种制动装置应用于变电压供电系统时,由于保护电压阈值恒定,只能按最高电压来确定,当母线电压下降较多时,这种耗能制动装置就不能够及时反应母线电压的快速上升,不能及时将母线电压控制在母线电压的当前水平,会造成母线电压的快速上升,当上升到母线电压原有的最大值时,才启动放电保护,耗掉过剩的电能,这会造成母线电压在短时间内大范围地变化,极有可能威胁系统的安全,造成系统工作的不稳定,因此需要研制一种电压跟随制动装置来解决该问题。
2 总体方案
智能电压跟随制动装置如图2所示。该单元由隔离滤波模块,母线电压、电流采样模块,功率管温度采样模块,信号采集调理模块,过压、过流、过温保护模块,通信模块,驱动模块,看门狗模块,中央处理器模块,制动单元主回路模块组成。
中央处理器模块是整个装置的核心,负责采集母线电压、电流的数值,判断直流母线的当前最新状态,及时修正放电的电压阈值,实现对直流母线电压的动态跟踪;处理过压、过流及过温信号,及时启动保护机制,防止烧毁装置;当系统确认直流母线过压时,启动放电系统,防止母线电压的过度上升;通过总线与整个控制系统通信,及时将电压、电流及本装置的一些状态参数传送给整个控制系统,实现信息共享。
当前母线电压的获取采用双冗余的方案,即通过两种方法获得母线的当前电压,可有效防止由于一些故障导致母线电压的漏判及误判。两种方法为
1)制动单元通过采样电流信号来判断电机的工作状态,当电流正向流动时,即电流采样值为正时,说明当电机处于电动机状态,此时存储当前电压值V1作为计算放电电压的阈值的基值,放电电压的计算公式为
2)通过驱动器判断电机的工作状态,通过总线读取驱动器测得的母线电压作为当前直流母线电压值V2。
中央处理器通过对比V1和V2的大小及前一时刻的值,确定当前母线的电压值。
1)采样电路的设计
电压和电流的采样采用电流型霍尔传感器,实现强电和弱电的分离,同时由于电流型传感器具有更好的抗干扰能力,可有效提高系统的抗干扰能力,保证系统的安全。由于霍尔传感器输出的是电流,需要将电流信号转换为弱电压信号,再通过放大调理,将传感器的信号送到中央处理器的A/D转换模块,实现信号的数据采集。具体电路如图3所示。
图中的电阻R1将霍尔传感器输出的电流信号转换为电压信号后,输入信号幅值调理电路,调理电路由两个反相器组成,第一个反相器调理信号的大小,第二个反相器增益为1,主要功能是将第一级输出的信号再反相还原,最后送到处理器的A/D进行采集。如果采样电压信号,只需将图2中的电阻R1去掉即可。
2)制动单元主回路的设计
制动单元主回路设计为斩波电路的形式,如图4所示,图中R是耗能电阻,D是续流二极管,开关管选择IGBT。其工作原理为当控制电路得到启动信号后,通知驱动电路发出高频方波信号控制IGBT的开关,当IGBT导通时,母线通过制动电阻和开关管形成导通回路,电能消耗在电阻上,当IGBT关闭时,二极管D与制动电阻形成闭合回路,开始续流,防止电压过高烧毁IGBT。IGBT两端并联无感电容,形成吸收回路,吸收电压尖峰,防止IGBT被击穿。
3)驱动电路的设计
驱动电路采用UC3843B设计。该芯片是高性能固定频率电流模式控制器,专为离线和直流至直流变换器应用而设计,具有可微调的振荡器、能进行精确的占空比控制、温度补偿的参考、高增益误差放大器、电流取样比较器和大电流图腾柱式输出,是驱动功率IGBT的理想器件。同时还具有良好的保护特性,包括输入和参考欠压锁定,逐周电流限制、可编程输出静区时间和单个脉冲测量锁存。其内部原理如图5所示,芯片引脚功能说明如表1。
根据本装置的功能需求,设计如图6所示的驱动电路。芯片的1脚和2脚串接有R10和C7组成的放大器补偿电路,提高放大器的反应速度,同时将2脚通过电阻R26直接接地,也就是将芯片内部的误差放大器负端输入置零。3脚的功能是电流取样,将该引脚通过电阻R32上拉至电源电压VCC,同时接至三极管T3的集电极端,三极管的射极接地,基极接控制信号,通过控制信号的高低可以将3脚的电平在0和VCC之间进行切换,从而达到控制6脚驱动脉冲输出的目的。4脚是RT/CT端,通过在该引脚接入电阻和电容来控制驱动脉冲的频率和脉宽,电阻的另一端要接8脚,电容的另一端接地,驱动脉冲频率的计算公式为
本电路电阻R15阻值满足大于5K的条件,因此可以用此式来估算驱动脉冲的频率。6脚和8脚均接2个去耦合电容。驱动脉冲6脚串10Ω的电阻后驱动功率管,同时将驱动端加一去耦合电容,防止干扰串入导致开关管的误动作。
4)软件设计
软件流程设计采用循环和中断相结合的方式。在循环中,软件完成通信、采样、母线电压的判断等,而过流、过热、过欠压及过载故障均采用中断机制,当故障到来时,及时中断当前的程序进入中断处理程序,保证系统响应的及时性。软件工作流程如图7所示。
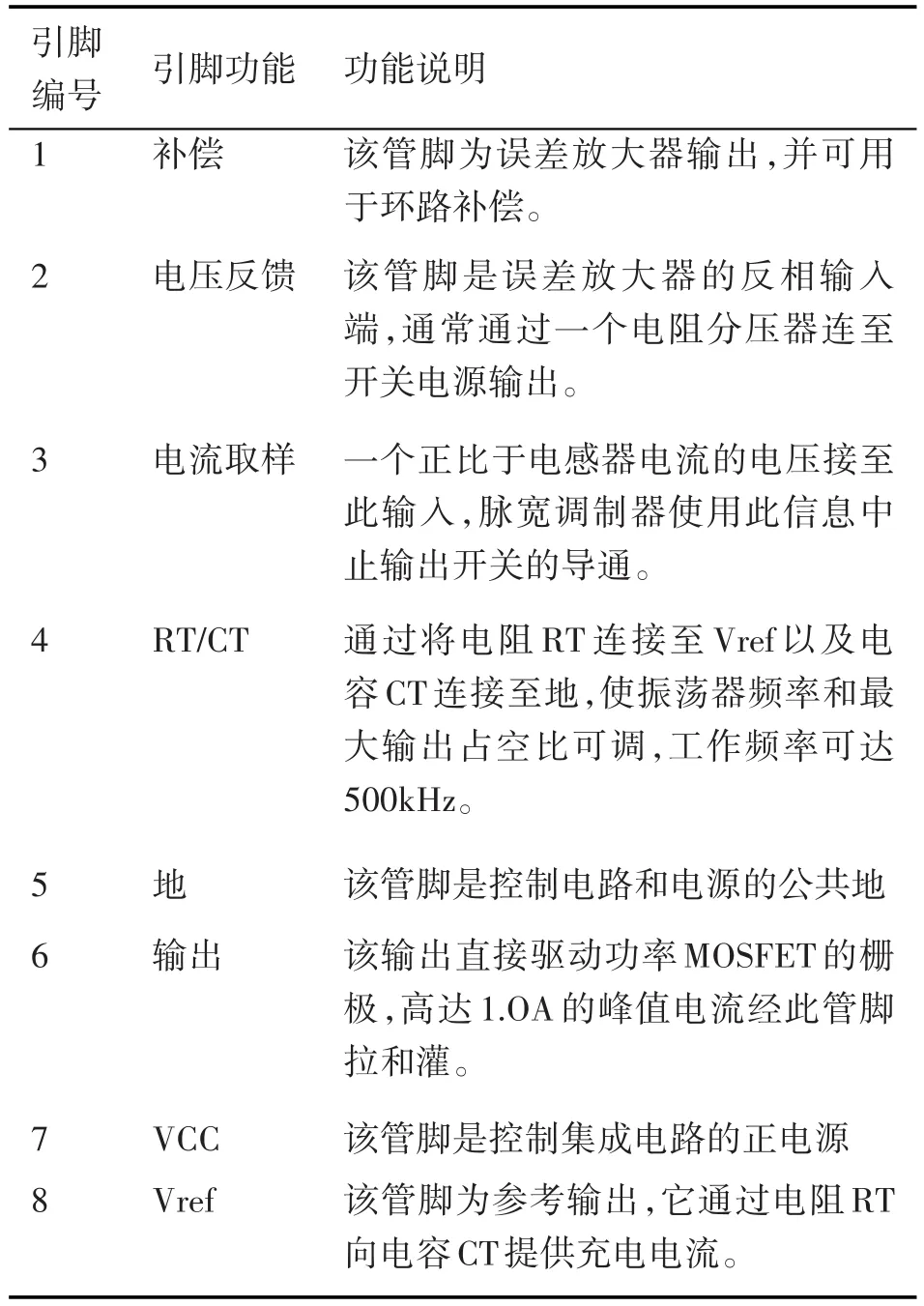
表1 UC3843B外围引脚功能
3 实验结果
根据本文方案研制了样机,并进行了模拟实验。实验方法为:采用交流调压器模拟电池电量逐渐下降的过程,输出电压随之下降,交流调压器的输出接整流滤波电路,将交流转变为直流供给电机驱动器,在电压下降过程中的不同点反复测试电机制动时母线电压的变化情况,结果表明,本文研制的装置能够跟随母线电压的变化实时调整放电电压阈值,从而在电机制动对直流母线充电时,及时将多余的电能通过外接大功率电阻消耗掉,将母线电压稳定在当前值,效果良好。
4 结语
本文针对目前耗能制动装置放电电压阈值不能灵活调整,应用于宽电压范围工作的驱动系统,当母线电压下降较多时,由于制动不及时容易造成母线电压大幅振荡,从而影响驱动系统安全的问题,提出了一种智能电压跟随制动解决方案。给出了详细设计方案,研制了样机,并进行了实际验证。结果表明,本文设计的电压跟随制动装置,能够自动判别并跟踪母线电压的变化,及时调整放电电压阈值以跟踪母线电压,从而当变电压工作的驱动系统处于发电状态时,本装置能够及时做出反应,将制动产生的多余电能及时消耗掉,将母线电压控制在当前水平,从而很好地保护了驱动系统安全。
[1]Chiara Fiori,Kyoungho Ahn,Hesham A.Rakha.Power-based electric vehicle energy consumption model:Model development and validation[J].Applied Energy,2016,168:257-268.
[2]曾建军,林知明,张建德.地铁制动能量分析及再生技术研究[J].电气化铁道,2006,06:33-36.
[3]周尚明.电阻-逆变型再生制动能量地面吸收装置的节能分析[J].城市轨道交通研究,2013,09:111-114,119.
[4]麦莉,张继红,宗长富等.基于电液制动系统的车辆稳定性控制[J].吉大学报(工学版),2010,40(3):607-613.
[5]唐鹏,周玉柱.超级电容在电动汽车上的应用探讨机[J].移动电源与车辆,2012,1:31-35.
[6]史丽萍,汤家升,罗明,等.制动能量吸收装置的选取及其控制分析[J].城市轨道交通研究,2013,8:92-96.
[7]李洪亮,樊平.基于超级电容器的矿用电动轮自卸车再生制动的研究[J].煤矿机械,2013,34(3):61-63.
[8]刘开国.城轨交通供电系统节能措施与经济运行[J].现代城市轨道交通,2009,01:13-14.
[9]杨晶.蓄电池电机车的再生制动运行分析[J].煤矿机械,2008,29(11):79-81.
[10]陈华光,曾红,王迎旭.基于DSP的电动轮自卸车电制动控制系统的设计[J].矿山机械,2010,38(9):40-43.
Design of Intelligent Voltage Following Brake
WANG ZhanyouHE Lin
(NationalKeyLaboratoryonShipVibration&Noise,Instituteof Noise&Vibration,Naval Universityof Engineering,Wuhan 430033)
The resistance energy consumption braking mode through resist has been adopted widely in motor drive system.But in the motor drive system which is powered by batteries,the bus voltage will fall with the decline of battery level,while the motor driver can work normally,thus the fixed voltage energy consumption brake can't work well,it can't control the bus voltage with the decline of battery level.In this case,this paper proposes an intelligent voltage following brake design,it can adjust voltage threshold of discharge of electricity with the decline of bus voltage,thus the motor drive system can be protected perfectly.As a result,the design of intelligent voltage following brake proposed in this paper can make up for the shortage of the fixed voltage energy consumption brake,it can work within the wide bus voltage range.
energy consumption brake,intelligent voltage following,motor driver
TP23
10.3969/j.issn.1672-9730.2017.07.040
2017年1月9日,
2017年2月27日
王占友,男,博士后,工程师,研究方向:检测与控制。何琳,男,硕士,教授,博士生导师,研究方向:振动与噪声控制。
