定位总成中无刷电机位置检测方法研究
2017-08-01杨飞雷晓龙
杨飞,雷晓龙
西安石油大学井下测控研究室(陕西西安710065)
定位总成中无刷电机位置检测方法研究
杨飞,雷晓龙
西安石油大学井下测控研究室(陕西西安710065)
通过模拟井下环境进行实验,提出一种新的反向电动势检测方法,引入干扰系数,硬件和软件结合,采集母线电压,得出含干扰项的反向电动势,再利用算法进行反向矫正,准确地得到无刷直流电机的位置信息,从而更加精准地控制电机。
无刷直流电机;反向电动势;相电压
在旋转导向钻井中,导向控制执行机构定位总成的动力来源主要是直流无刷电机,对于无刷直流电机的位置检测,一般是通过采集直流无刷电机中的传感器信号,经过计算并控制功率管工作。但是在井下存在高温、强震动、复杂的电磁场环境下,位置传感器经常出现损坏,或者位置传感器信号被干扰。给电机驱动错误信号,导致电机无法正常工作,结果造成无法正确地控制导向钻井井眼轨迹,这样给石油钻井带来巨大的经济损失。
目前对无刷直流电机反向电动势的研究,是对无位置传感器直流无刷电机主要方法的研究[1-4]。文献(5)是根据端电压构造的电机中心得到反向电动势的过零信号,文献(6)根据两端电压的平均值之差得到方向电动势的过零点,文献(7)提出了利用线电压之差实现对转子位置的识别,以上方法都是通过模拟仿真得到的实验结果,但是在实际井下工程中,存在高温、振动和电磁干扰,这些都是不能忽略的,而且这些干扰因素可能导致位置反向电动势位置检测出现错误,导致电机无法正常运转。
1 无刷电机的驱动方式
为了使电机本体的利用率更高,采用三相全控电路,如图1所示。在该电路中,Q1、Q2、Q3、Q4、Q5、Q6为6只MOSFET功率管;D1、D2、D3、D4、D5、D6为续流二极管;主要是利用MOSFET的开关作用,依次导通电机绕组,导通方式有两两导通和三三导通两种方式,主要采用三三导通方式,因为三三导通方式可以获得更大的合成转矩矢量。
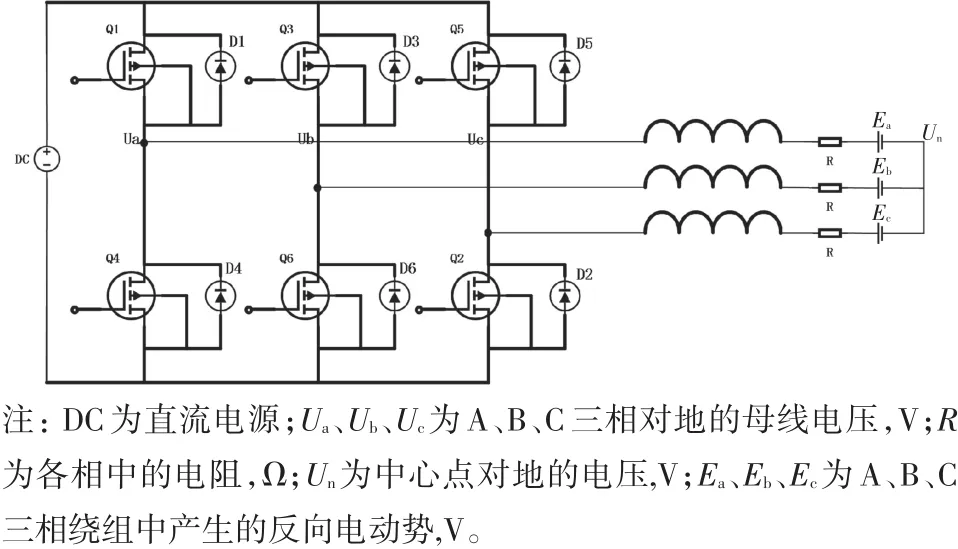
图1 三相无刷直流电机驱动电路模型
由图1可得其三相电压平衡方程式:
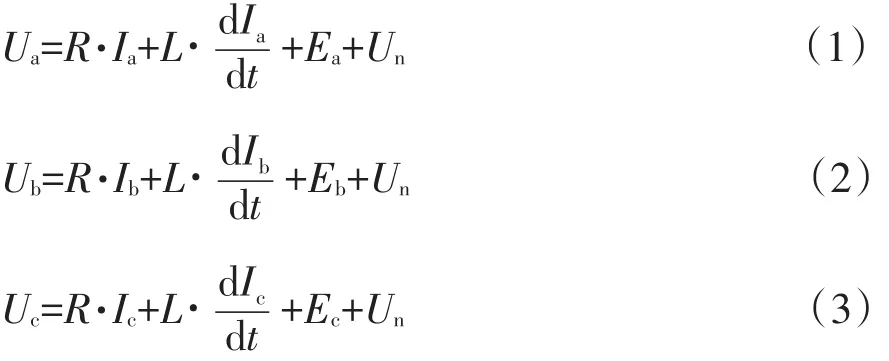
式中:Ia、Ib、Ic为A、B、C三相绕组的相电流,A;L为各相中的电感,H;t为通电时间,s。
2 反向电动势位置估计原理
2.1 反向电动势位置估计原理
在两两通电的方式中,每个状态只有两相通电,始终有一相是不通电的,假设A相不通电,则B、C两相导通,这时Ia=0,Ib=-Ic,由图2可知,由于中心点的电压无法直接测量,因此通过计算得到中心点的电压,例如,在A相反电动势过零点时,将式(2)、(3)相加,可得中心点的电压为
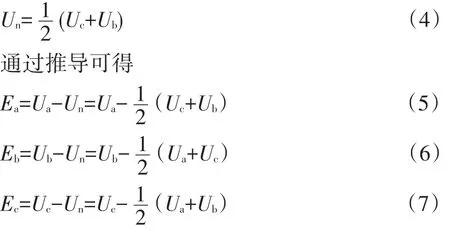
功率管在驱动直流无刷电机的过程中,功率管每60°电角度换相1次,每个电周期内换相6次,每相绕组正反相各通电120°。因此,当测得反电动势波形过零点后,在延迟30°电度角度才是换相点。
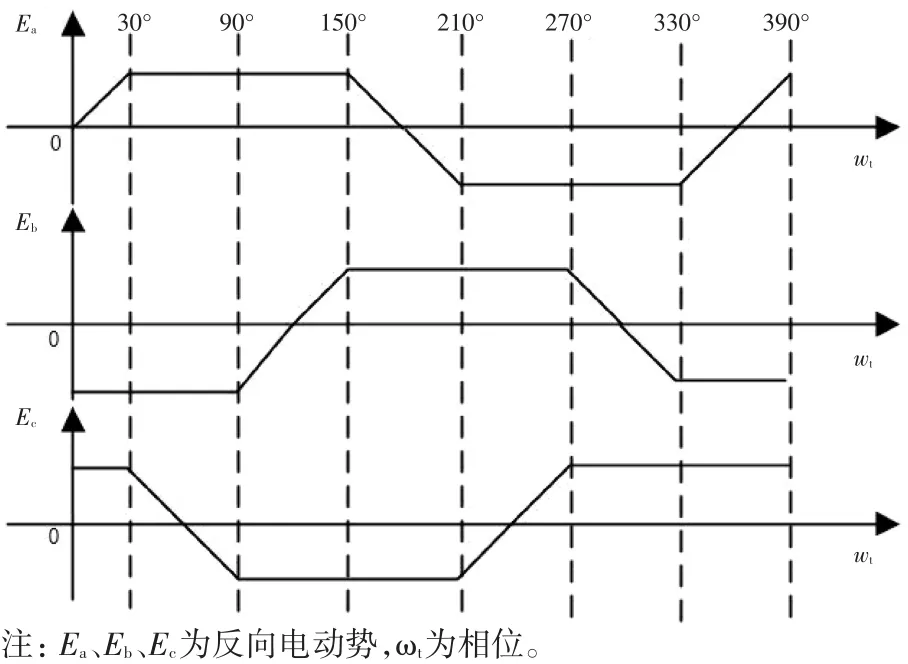
图2 反向电动势及绕组通电波形
其中A相绕组在1个电周期内的反向电动势计算公式:

式中:Ke为反电动势常数;根据法拉第电磁感应定律(右手定则),反电动势常数Ke为:

其中ZD为导体总数,Ω。
2.2 井下参数计算
由于井下存在高温、振动和电磁干扰,根据各个干扰所产生的效应。通过设计一二阶低通滤波器,对高频电磁干扰进行抑制,图3是一个二阶低通滤波器,其中包含两个RC支路。
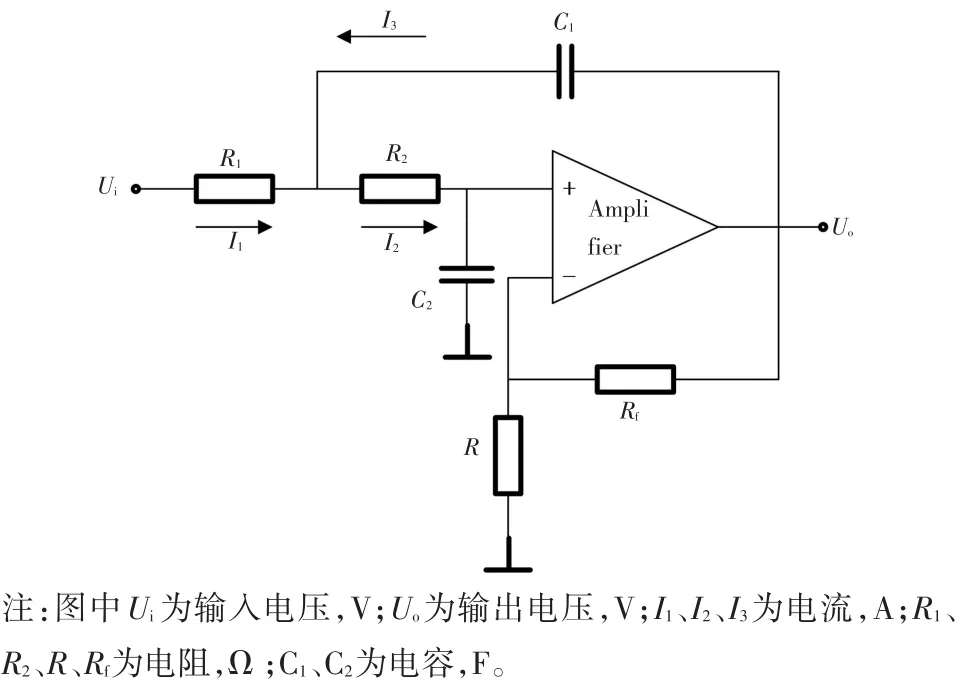
图3 二阶低通滤波器
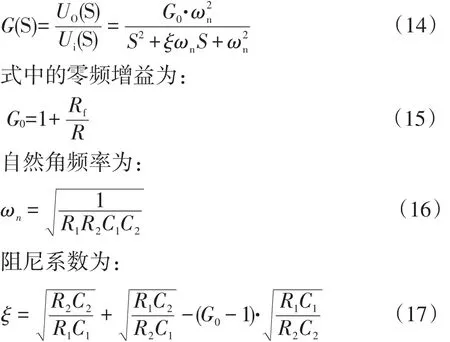
其中图3所示的二阶低通滤波器的传递函数为:
引入温度系数Kt,根据线圈阻抗与温度换算公式:

其中,式中T1为绕组温度,℃;T为电阻温度常数,℃;T2为换算温度(75℃或15℃),℃;Rt1为测量电阻值,Ω;Rt2为换算电阻值,Ω。
当温度变化范围不大时,纯金属的电阻率随温度呈线性增大,即

式中ρ和ρ0分别是T1和0℃的电阻率,Ω·m;T1为温度差,℃。

式中R和Rt0分别是金属导体在T1和0℃的电阻,Ω。电阻温度系数当温度每升高1℃时,导体电阻的增加值与原来电阻的比值,叫做电阻温度系数。其计算公式为:

将式(1)、(2)、(3)式通过变形,代入Kt得新的电压平衡方程:
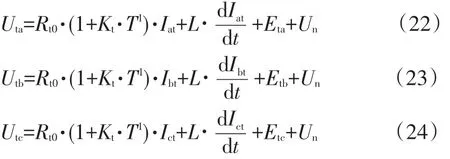
由式(22)、(23)、(24)计算结果,通过算法反向补偿计算,达到对温度影响因素消除的目的。电路原理框图如图4所示:

图4 温度补偿电路
根据图4中的设计电路,通过程序对温度数据进行采集,计算井下实时温度,将井下温度参数带入式(18)到(24)得到实际相电压Uta、Utb、Utc,通过对电压数据进行采集,准确地计算反向电动势过零点位置。
3 实验及结果分析
本次实验采集了电机相电压信号,并测量了电机线圈负载,实验用无刷直流电机参数如表1所示,实验结果如图5所示。

表1 无刷直流电机参数
图5中ch1、ch2、ch3分别表示Ua、Ub、Uc3个相电压,ch4表示A相中的电流,通过理论计算得出反向电动势的理论值。再通过与实际测试矫正后的反向电动势波形(图6)数据进行对比。
对电路进行增加滤波器,同时根据理论计算设计滤波器,测试反向电动势的信号如图6所示。
图6是给定转速为1 300 r/min时,测得的反电动势波形,线反电动势波形的平顶宽度为60°左右的梯形波,这与理论分析一致。但是在图6中出现换相点的畸变,因此出现较多谐波。

图5 电机相电压测试结果
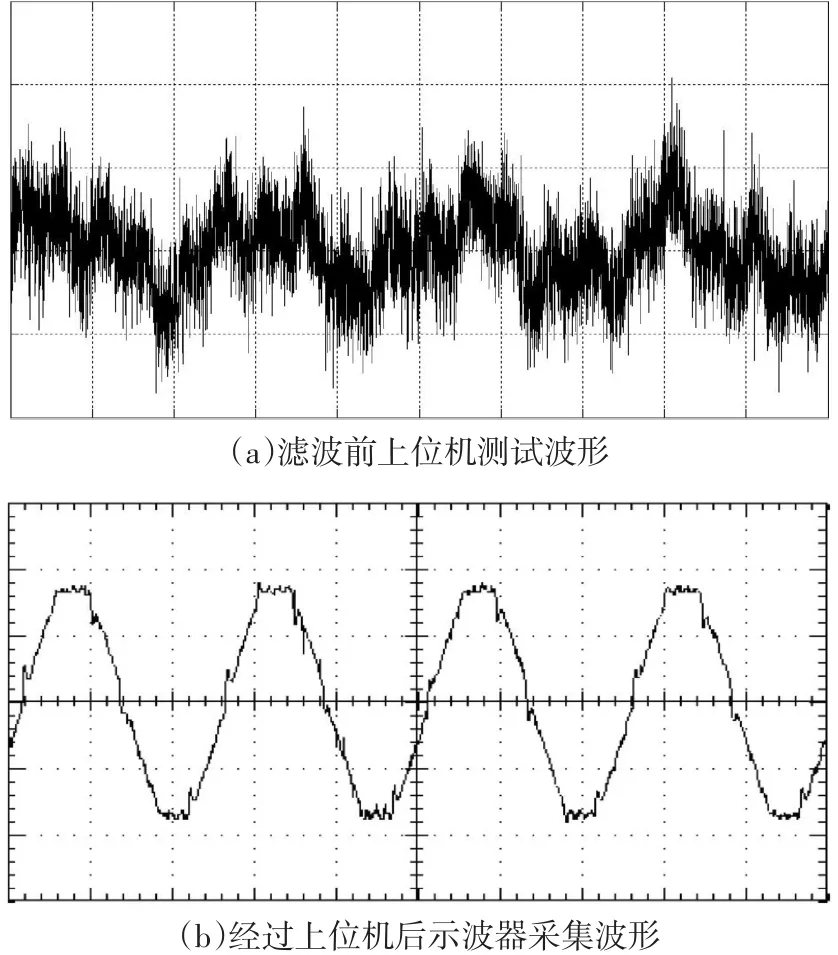
图6 线反电动势波形
4 结论
通过对井下环境的考虑,改进了反向电动势的检测方法,采集相电压的同时也采集了环境温度,对井下温度影响进行方向较正。设计了井下滤波器对相电压的电磁干扰进行滤除。消除了传统方法对井下环境的参数忽略而导致反向电动势无法准确采集和对逆变器控制不精准的问题。该研究对于无刷直流电机在石油钻井中的应用具有实际意义。
[1]韦鲲,任军军,张仲超.三次谐波检测无刷直流电机转子位置的研究[J].中国电机工程学报,2004,24(5):163-167.[2]Halvaei N A,Hassan M,Abolfazl V.A novel sensorless control method for four-switch,brushless DC motor drive without using any 30°phase shifter[C]//International Conference on Electrical Machines and Systems,2007:408-413.
[3]Jang G H,Kim M G.Optimal commutation of a BLDC motor by utilizing the symmetric terminal voltage[J].IEEE Transactions on Magnetics,2006,42(10):3473-3475.
[4]Hicham F,Mohamed D,Abdellatif R,et al.Sliding mode observer for position and speed estimations in brushless DC motor[C]//IEEEInternationalConferenceonIndustrial Technology,2004:121-126.
[5]王宏伟,梁晖.无位置传感器无刷直流电机的DSP控制[J].电力电子技术,2005,39(6):102-104.
[6]吴春华,陈国呈,孙承波.一种改进的无刷直流电机无位置传感器检测技术[J].电气传动自动化,2005,27(3):31-33.
[7]Damodharan P,Vasudevan K.Indirect back-EMF zero crossing detection for sensorless BLDC motor operation[C].2005 IEEE Annual Meeting of PEDS,2005:1107-1111.
[8]姜伟,蒋世全,付鑫生,等.旋转导向钻井技术应用研究及其进展[J].天然气工业,2013,33(4):75-79.
[9]申卫兵.基于无位置无刷直流电机为动力的新型定位总成的研究[D].西安:西安石油大学,2011.
[10]南洋.旋转导向钻井系统中定位总成硬件与软件的改进[D].西安:西安石油大学,2010.
[11]安群涛,孙力,赵克,等.基于开关函数模型的逆变器开路故障诊断方法[J].中国电机工程学报,2010(6):1-6.
A new reverse electromotive force(EMF)detection method is proposed by simulating downhole environment:an interference coefficient is introduced,the bus voltage is collected by combining hardware with software,and the reverse electromotive force with disturbance is obtained.The reverse correction is finished using algorithm to obtain the accurate position information of the brushless DC motor and then to more accurately control the motor.
brushless DC motor;reverse electromotive force;phase voltage
左学敏
2017-02-18
杨飞(1988-),男,硕士研究生,主要从事石油仪器设计技术研究工作。
