基于领航-跟随结构的联合收获机群协同导航控制方法
2017-07-31白晓平胡静涛
白晓平 王 卓 胡静涛 高 雷 熊 锋
(中国科学院沈阳自动化研究所,沈阳110016)
基于领航-跟随结构的联合收获机群协同导航控制方法
白晓平 王 卓 胡静涛 高 雷 熊 锋
(中国科学院沈阳自动化研究所,沈阳110016)
面向联合收获机群协同导航作业需求,提出一种基于领航-跟随结构的收获机群协同导航控制方法。该方法在建立收获机群运动学模型的基础上,结合反馈线性化及滑模控制理论设计了渐进稳定的路径跟踪控制律和队形保持控制律。为验证所提模型及方法的有效性,以4台收获机组成的收获机群为试验平台,进行了机群协同导航控制试验。当速度为1.0m/s时,领航者的平均跟踪误差为5.81 cm,跟随者的平均跟踪误差为5.93 cm,与单台收获机的导航控制精度相近,验证了所提方法的可行性和有效性。
收获机群;跟随-领航结构;协同控制;路径跟踪;队形保持
引言
随着我国农业机械化作业水平的不断提高,农业呈现出集约化、规模化、产业化的发展趋势,出现了多台农机在田间联合作业的集群作业模式。农机集群作业模式对农机导航系统提出了新的技术挑战,研究多机协同导航技术是下一代农业机械导航系统要解决的关键技术之一[1-2]。
多机协同导航控制作为多机协同导航技术的重要内容,受到了国外学者的广泛关注[3-5]。MOOREHEAD等[6]采用一台远程监控终端管理果园中多台自主导航拖拉机、喷药机,协调多台农机协同完成作业任务。JOHNSON等[7]针对泥苔藓收获过程中,多台收获机的协同导航控制问题进行了深入研究。HAO等[8]提出了一种收获机、运粮车主从协同方案,收获机作为领航者,可以决定运粮车的行为;运粮车作为跟随者,可根据领航者的指令调整自己的位置及航向。ZHU等[9]针对由两台拖拉机组成的拖拉机队列,设计了一种主从协同控制方案,针对两台拖拉机之间的横向距离保持问题,设计了一种LQR控制器,实现了拖拉机队列对直线路径和曲线路径的精确跟踪。NOGUCHI等[10]提出了一种FOLLOW算法,使得从机可与主机保持设定距离和角度跟随主机完成作业任务。国内关于农机导航控制的研究主要集中在单台农机的导航控制方面,包括基于模型的控制方法[11-17]和非基于模型的控制方法[18-24]。多机协同导航技术在机器人等领域的应用已较为广泛,但在农业机械领域则鲜有文献报道。毕伟平等[25]设计了一种基于双目视觉的主从式果园作业车辆自主跟随系统,实现了从机对引导车辆的自动跟随。
鉴于上述分析,面向联合收获机群协同导航作业需求,本文提出一种基于领航-跟随结构的联合收获机群协同导航控制方法。
1 基于领航-跟随结构的联合收获机群运动学模型
1.1 单台收获机的运动学模型
在不考虑车轮与地面相互作用,无侧倾俯仰、侧滑等运动的情况下,可将联合收获机简化成二轮车模型进行运动学分析,如图1所示。其中,点M是曲线路径上距控制点O最近的点。

图1 运动学模型示意图Fig.1 Kinematicmodel
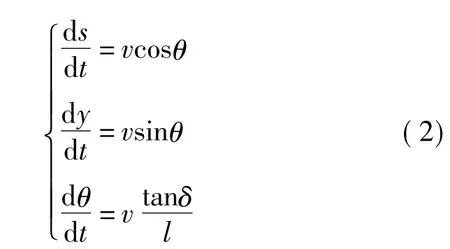
基于以上运动学模型示意图,结合几何知识及物理规律[26],可推导出收获机运动学模型微分方程组为

式中 c(s)——跟踪曲线路径在M点的曲率
当收获机追踪的路径为直线时,农机运动学模型可表述为
对式(2)进行简单运算可得到收获机横向运动学模型微分方程组为

1.2 收获机群运动学模型
基于领航-跟随结构的收获机群以1台收获机作为领航者,其余收获机均作为跟随者,与领航者保持设定的横向距离和纵向距离完成收获作业任务,如图2所示。

图2 收获机群编队作业示意图Fig.2 Schematic diagram of harvester group
定义领航者为V0,跟随者为Vj,可用如图3所示的领航-跟随结构模型来描述收获机的编队结构。
图中 LAjLBj——跟随者的设定路径
A0B0——领航者的设定路径

图3 领航-跟随结构Fig.3 Leader-follower structure

由图3所示,跟随者与领航者间的横向偏差和纵向偏差计算式为
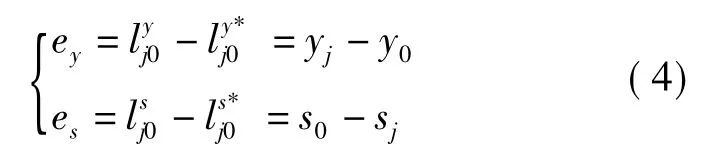
由式(4)知,领航者与跟随者仅需追踪各自的设定路径作业,使得y0→0,yj→0,即可使得跟随者与领航者的横向偏差ey→0。
至此,领航者与跟随者间的横向距离保持控制问题可转化为领航者、跟随者的路径跟踪问题进行解决。因此,可依据式(3)所示的收获机横向运动学模型,进行领航者、跟随者的路径跟踪控制器设计。
式(4)中,es对时间t求导

由于在收获作业过程中,领航者和跟随者均追踪直线路径作业,结合式(2)和式(5),可得跟随者相对领航者的纵向运动学模型微分方程为

纵向运动学模型为队形保持控制器的设计提供了依据。
2 基于领航-跟随结构的协同导航控制方法
根据第1节所建立的联合收获机群运动学模型,基于领航-跟随结构的协同导航控制器设计分成路径跟踪控制器设计和队形保持控制器设计两部分,控制器设计结构如图4所示。
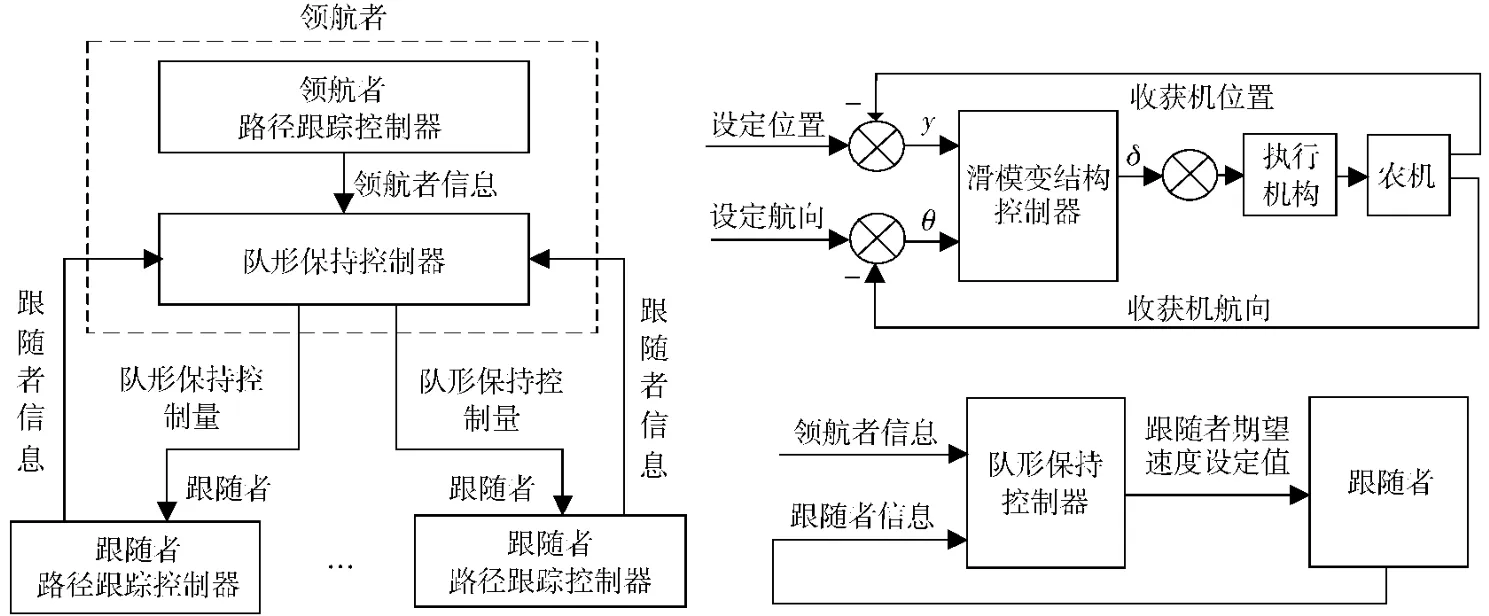
图4 基于跟随-领航结构的协同导航控制器设计总体框图Fig.4 Overall block diagram of collaborative navigation controller design based on leader-follower structure
队形保持控制的作用就是使各跟随者与领航者保持设定纵向距离,即,使收获机无碰撞完成作业任务。队形保持控制器以各跟随者与领航者的纵向距离与设定纵向距离的偏差为输入,设计渐进稳定的控制器,输出期望的跟随者前进速度,使各跟随者与领航者间的纵向距离追踪设定值。在该层控制中,采用集中式的控制计算,领航者根据各跟随者的位置及自身的位置计算纵向距离偏差值及控制量,然后通过网络将控制量传递给需要调整的跟随者。
路径跟踪控制的作用是使各跟随者追踪各自的设定路径作业,从而保持与领航者间横向距离追踪设定值,即。路径跟踪控制器以实际收获机位置与设定路径的横向偏差和航向偏差作为输入,设计渐进稳定的控制器,输出期望的车轮转角,使各跟随者与领航者间的横向距离追踪设定值。在该层控制中采用集中式路径规划和分布式控制量计算,即集中规划机群中各台收获机的路径,然后将规划好的路径通过通信网络传递给各跟随者,各跟随者根据自身的位姿情况,独立进行各自的路径跟踪控制量计算。
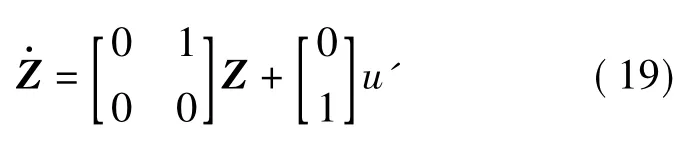
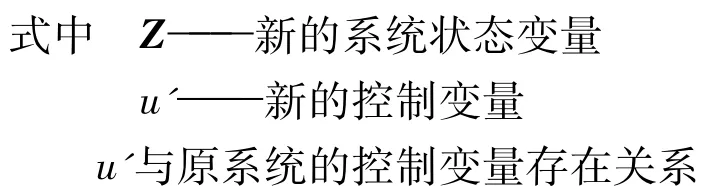
为节省驾驶室内的空间、提高装置的集成度,将除田间计算机外的其余电路集成在导航控制箱内,如图5所示。其中,智能节点负责解析航向传感器和电子尺等外部传感器的数据;位姿解析电路负责解析高精度定位装置的定位数据;导航控制器是路径跟踪控制和队形保持控制的代码执行载体(硬件电路与智能节点基本相同);网关电路负责领航者与跟随者间的通信。
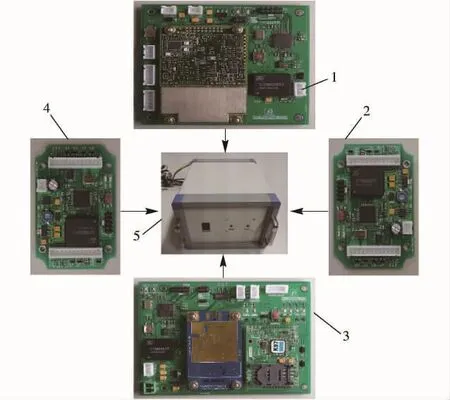
图5 集成式导航控制箱Fig.5 Integrated navigation control box
2.1 基于积分滑模控制的队形保持控制律设计
队形保持控制器的设计目标是通过对跟随者设定速度的调整,使得跟随者与领航者保持设定纵向距离前进。
队形保持控制器采用基于积分滑模面的滑模控制方法,控制器设计包括积分滑模面求解和控制律设计两部分。
为消除静态偏差,提高滑模控制精度,本文选取积分滑模面为

式中 es——跟随者与领航者间实时纵向距离偏差
eτ——跟随者与领航者间历史纵向距离偏差
kp——比例系数
kI——积分系数,为正实数

式(12)中,Δvs表示跟随者速度沿设定路径方向分量的增量,将式(12)代入式(11)得

2.2 基于反馈线性化滑模控制的路径跟踪控制律设计
路径跟踪控制器的设计目标是通过对跟随者、领航者车轮转角的控制,使跟随者、领航者追踪各自设定路径前进,从而保持横向距离,即使y0→0,yj→0。
路径跟踪控制器采用基于反馈线性化滑模控制方法,控制器设计包括反馈线性化模型求取、线性滑模面求解和控制律设计3部分。
为求取等价线性化模型,首先选取合适的状态变量和输入变量,将式(3)所示的模型转换为标准的仿射非线性模型。
选择系统输入变量u=tanσ,系统状态变量X=[x1x2]T=[ymθ]T,将式(3)所示的非线性运动学模型转换成标准仿射非线性模型

应用可反馈线性化定理,得该二维非线性系统是可反馈线性化的。即该二维非线性单输入系统局部反馈等价于具有控制器标准型的线性系统。即通过坐标变换

可将原非线性系统变换成线性系统布鲁诺夫斯基标准型
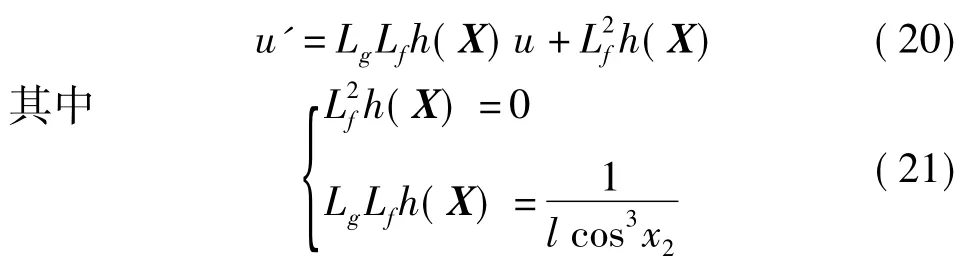
经过反馈线性化,得到了系统的反馈线性化模型,可采用线性系统的控制方法设计渐进稳定的控制律。原非线性系统的控制问题转换为系统在原点的镇定问题。
由于系统追踪参考值 Z*=[z1refz2ref]=[0 0],可得到以误差变量E=[e1e2]为状态变量的系统状态方程为

为解决以上原点镇定问题,选取线性切换函数为

整理得,系统的滑动模态运动方程为

式中 c1——调节参数,为正实数
因此,只要保证c1>0,即可保证滑动模态在原点(0,0)上渐进稳定,调节c1值,即可调节滑动模态的动态品质。
经过坐标反变换,可得到原系统的滑模面s(X)



结合式(23)和式(26),可得控制律u'为

经过坐标反变换,原系统的控制律为
3 试验与结果分析
为验证本文所提模型及方法,将集成研发的联合收获机群协同导航系统安装在试验收获机上,搭建收获机群编队控制试验平台,进行1台领航者与3台跟随者的协同导航控制试验,如图6所示。

图6 协同导航控制试验现场Fig.6 Collaborative navigation control experiment scene
3.1 试验系统
作业过程中,领航者与跟随者的行驶速度均为1.0m/s。领航者导航子系统和跟随者导航子系统均由路径跟踪控制器、田间计算机、位姿检测单元、转向控制器和执行装置构成。2个子系统内部各机载装置间由CAN总线实现通信,2个子系统间由短距无线网络实现互通互联。其中位姿检测单元包括位置检测单元、航向检测单元和转角检测单元。位置检测单元由高精度定位装置和智能节点组成,高精度定位装置实时采集收获机的位置信息,采样频率为5 Hz,定位精度为1 cm。航向检测单元由MTI和智能节点组成,MTI实时采集收获机的航向信息,采样频率为100 Hz,测量精度为1°。转向角检测单元由电子尺和智能节点组成,检测精度为1°。试验系统实物如图7所示。
3.2 路径规划
选择长为200 m左右的田块MNPQ,如图8中虚线所示。AB表示领航者设定路径,A1B1表示第1台跟随者设定路径,A2B2表示第2台跟随者设定路径,A3B3表示第3台跟随者设定路径。

图7 试验系统Fig.7 Experimental system

图8 路径规划示意图Fig.8 Schematic diagram of path planning

以领航者路径为基准,采用AB线偏移的方法依次规划出跟随者路径,并将跟随者路径通过无线节点发送给跟随者。
3.3 试验过程
(1)打开试验相关的高精度定位装置基准站系统、试验数据检测记录系统,并进行航向传感器的磁场校正和磁偏角补偿。
(2)将领航者与跟随者停靠在各自导航路径AB线的A端内侧,并使车辆尽量停靠在AB线上。
(3)开动领航者,并启动导航控制系统,进行领航者路径追踪。跟随者计算沿导航路径AB线方向与领航者的距离,到达设定距离后启动跟随者导航系统,进行跟随者路径跟踪。同时,使用高精度定位装置记录领航者与跟随者的作业轨迹。
(4)当领航者到达B点时,提示驾驶员停止路径跟踪,驾驶员通过人机界面停止路径追踪,恢复人工驾驶;同样,当跟随者到达设定点B结束一次直线路径追踪试验。
(5)重复步骤(2)~(4),重复试验5次。
3.4 数据采集
以架设在联合收获机上的高精度定位装置(定位精度为1 cm)的定位数据作为收获机的实际行驶轨迹,对路径追踪试验时记录下的行驶轨迹与目标路径进行误差分析,试验时平均偏差为


式中 (x0,y0)——轨迹点坐标
n——轨迹点数 e——平均偏差di——第i个轨迹点的横向偏差
di——第i个轨迹点的横向偏差
3.5 结果分析
领航者跟踪平均偏差为5.81 cm,如表1所示。跟随者平均跟踪偏差为5.93 cm,如表2所示。
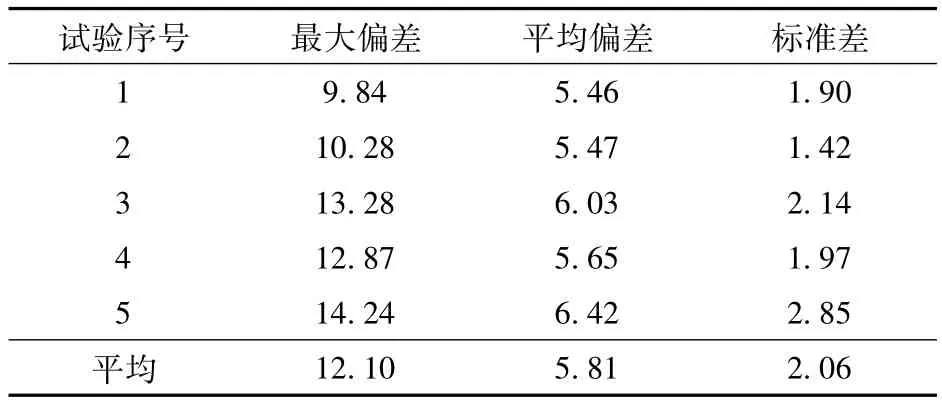
表1 领航者横向跟踪误差统计结果Tab.1 Lateral tracking error statistics of leader cm

表2 跟随者横向跟踪误差统计结果Tab.2 Lateral tracking error statistics of follower cm
以上试验结果表明,采用本文所提方法进行收获机群编队,领航者与跟随者的平均偏差均小于6 cm,最大偏差均小于15 cm。单机导航的平均偏差一般为5 cm左右[27-28],从导航精度来看,机群协同导航与单机导航相近。但是,机群导航更易实现机群间多台农机信息共享、机群间多台农机间协同作业,可提高多台农机的大面积作业能力,便于管理,对实现收割、耕整地等大面积作业环节的自动化具有重要的推动作用。
4 结束语
针对联合收获机群协同导航控制问题,提出了一种基于领航-跟随结构的联合收获机群协同导航控制方法。该方法将协同导航控制问题解耦成横向距离保持控制和纵向距离保持控制2个子问题进行解决,并采用滑模控制理论设计了渐进稳定的路径保持控制律和队形保持控制律。试验结果表明:领航者与跟随者的平均偏差均小于6 cm,导航控制精度与单机导航相近,验证了本文所提方法的可行性和有效性。但是,本文仅对机群田间作业过程中的协同导航控制问题进行了研究,未涉及地头转向过程中机群的协同导航控制问题。因此,下一步工作将重点对地头转向过程中机群协同导航控制问题进行研究,以实现机群连续自主收割作业目标。
1 SHEARER SA,PITLA SK,LUCK JD.Trends in the automation of agricultural field machinery[C]∥Proceedings of the 21st Annual Meeting of the Club of Bologna,Italy,2010.
2 胡静涛,高雷,白晓平,等.农业机械自动导航技术研究进展[J].农业工程学报,2015,31(10):1-10.HU Jingtao,GAO Lei,BAIXiaoping,et al.Review of research on automatic guidance of agricultural vechicles[J].Transactions of the CSAE,2015,31(10):1-10.(in Chinese)
3 BOCHTISD D,SRENSEN CG.The vehicle routing problem in field logistics part I[J].Biosystems Engineering,2009,104(4): 447-457.
4 BOCHTISD D,SRENSEN C G.The vehicle routing problem in field logistics:part II[J].Biosystems Engineering,2010,105(2): 180-188.
5 BOCHTISDD,SRENSENCG.Conceptualmodel of fleetmanagement in agriculture[J].Biosystems Engineering,2010,105(1): 41-50.
6 MOOREHEAD S,WELLINGTON C,GILMORE B,et al.Automating orchards:a system of autonomous tractors for orchard maintenance[C]∥ Proceedings of the IEEE International Conference on Intelligent Robots and Systems,Portugal,2012.
7 JOHNSON D A,NAFFIN D J,PUHALLA JS,et al.Development and implementation of a team of robotic tractors for autonomous peatmoss harvesting[J].Journal of Field Robotics,2009,26(6-7):549-571.
8 HAO Y,LAXTON B,BENSON E,et al.Differential flatness-based formation following of a simulated autonomous small grain harvesting system[J].Transactions of the ASABE,2004,47(3):933-941.
9 ZHU Z,TAKEDA J,XIE B,et al.Tractor platooning system on sloping terrain at low speed[J].Transactions of the ASABE,2009,52(4):1385-1393.
10 NOGUCHIN,WILL J,REID J,et al.Development of a master-slave robot system for farm operations.[J].Computers&Electronics in Agriculture,2004,44(1):1-19.
11 吕安涛,宋正河,毛恩荣.拖拉机自动转向最优控制方法的研究[J].农业工程学报,2006,22(8):116-119.LAntao,SONG Zhenghe,MAOEnrong.Optimized controlmethod for tractor automatic steering[J].Transactions of the CSAE,2006,22(8):116-119.(in Chinese)
12 陈军,鸟巢谅,朱忠祥,等.拖拉机在牧草地上自动引导行走的控制[J].农业机械学报,2005,36(7):104-107.CHEN Jun,TORISU R,ZHU Zhongxiang,et al.Study on automatic guidance for tractor on grassland[J].Transactions of the Chinese Society for Agricultural Machinery,2005,36(7):104-107.(in Chinese)
13 陈军,鸟巢谅.拖拉机行驶路线的自动变更研究[J].农业工程学报,2005,21(1):83-86.CHEN Jun,TORISU R.Automatic control of lane change for autonomous tractors[J].Transactions of the CSAE,2005,21(1): 83-86.(in Chinese)
14 陈军,鸟巢谅,朱忠祥,等.拖拉机沿曲线路径的跟踪控制[J].农业工程学报,2006,22(11):108-111.CHEN Jun,TORISU R,ZHU Zhongxiang,et al.On-tracking control of tractor running along curved paths[J].Transactions of the CSAE,2006,22(11):108-111.(in Chinese)
15 LENAIN R,THUILOT B,CARIOU C,et al.A new nonlinear control for vehicle in sliding conditions:application to automatic guidance of farm vehicles using RTK GPS[C]∥Proceedings of the IEEE International Conference on Robotics and Automation,2004:4381-4386.
16 CARIOU C,CORDESSESL,MARTINET P.Automatic guidance of a farm tractor along curved paths,using a unique CP-DGPS[C]∥Proceedings of the IEEE International Conference on Intelligent Robots and Systems,USA,2001:674-679.
17 李逃昌,胡静涛,高雷,等.一种与行驶速度无关的农机路径跟踪方法[J/OL].农业机械学报,2014,45(2):59-65.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20140211&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2014.02.011.LITaochang,HU Jingtao,GAO Lei,et al.Agricultural machine path tracking method irrelevant to travel speeds[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2014,45(2):59-65.(in Chinese)
18 周建军,张漫,汪懋华,等.基于模糊控制的农用车辆路线跟踪[J].农业机械学报,2009,40(4):151-156.ZHOU Jianjun,ZHANG Man,WANG Maohua,et al.Path tracking for agricultural vehicle based on fuzzy control[J].Transactions of the Chinese Society for Agricultural Machinery,2009,40(4):151-156.(in Chinese)
19 吕安涛,毛恩荣,宋正河,等.一种拖拉机自动驾驶复合模糊控制方法[J].农业机械学报,2006,37(4):17-20.LAntao,MAO Enrong,SONG Zhenghe,etal.A complex fuzzy control technique of tractor automatic steering[J].Transactions of the Chinese Society for Agricultural Machinery,2006,37(4):17-20.(in Chinese)
20 刘兆祥,刘刚,籍颖,等.基于自适应模糊控制的拖拉机自动导航系统[J].农业机械学报,2010,41(11):148-152.LIU Zhaoxiang,LIU Gang,JI Ying,et al.Autonomous navigation system for agricultural tractor based on self-adapted fuzzy control[J].Transactions of the Chinese Society for Agricultural Machinery,2010,41(11):148~152.(in Chinese)
21 李逃昌,胡静涛,高雷,等.基于模糊自适应纯追踪模型的农业机械路径跟踪方法[J/OL].农业机械学报,2013,44(1): 205-210.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20130139&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2013.01.039.LITaochang.HU Jingtao,GAO Lei,etal.Agriculturalmachine path trackingmethod based on fuzzy adaptive pure pursuitmodel[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2013,44(1):205-210.(in Chinese)
22 白晓平,胡静涛,高雷,等.农机导航自校正模型控制方法研究[J/OL].农业机械学报,2015,46(2):1-7.http:∥www.jcsam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20150201&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2015.02.001.BAIXiaoping,HU Jingtao,GAO Lei,et al.Self-tuningmodel controlmethod for farm machine navigation[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2015,46(2):1-7.(in Chinese)
23 熊中刚,叶振环,贺娟,等.基于免疫模糊PID的小型农业机械路径智能跟踪控制[J].机器人,2015,37(2):212-223.XIONG Zhonggang,YE Zhenhuan,HE Juan,et al.Small agriculturalmachinery path intelligent tracking control based on fuzzy immune PID[J].Robot,2015,37(2):212-223.(in Chinese)
24 李逃昌,胡静涛,高雷.基于级联式控制策略的农业机械鲁棒自适应路径跟踪控制[J].机器人,2014,36(2):241-249.LITaochang,HU Jingtao,GAO Lei.Robust adaptive path tracking control of agriculturalmachines based on cascaded control strategy[J].Robot,2014,36(2):241-249.(in Chinese)
25 毕伟平,张欢,瞿振林,等.基于双目视觉的主从式果园作业车辆自主跟随系统设计[J].湖南农业大学学报,2016,42(2): 344-348.BIWeiping,ZHANG Huan,QU Zhenlin,et al.Design of autonomous following system for master slave vehicles operating in orchard based on binocular serveo vision[J].Journal of Hunan Agricultural University,2016,42(2):344-348.(in Chinese)
26 BAIXiaoping,HU Jingtao,GAO Lei,etal.A sliding-mode variable-structure controller based on exact feedback linearization for automatic navigation system[J].International Journal of Agricultural and Biological Engineering,2016,9(5):158-165.
27 张美娜,吕晓兰,陶建平,等.农用车辆自主导航控制系统设计与试验[J/OL].农业机械学报,2016,47(7):42-47.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20160707&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2016.07.007.ZHANGMeina,LXiaolan,TAO Jianping,et al.Design and experiment of automatic guidance control system in agricultural vehicle[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2016,47(7):42-47.(in Chinese)
28 刘进一,杜岳峰,张硕,等.基于GNSS/MIMU/DR的农业机械组合导航定位方法[J/OL].农业机械学报,2016,47(增刊): 1-7.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=2016s001&journal_id=jcsam.DOI: 10.6041/j.issn.1000-1298.2016.S0.001.LIU Jinyi,DU Yuefeng,ZHANG Shuo,etal.Automatic navigationmethod for agriculturalmachinery based on GNSS/MIMU/DR information fusion[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2016,47(Supp.):1-7.(in Chinese)
Harvester Group Corporative Navigation Method Based on Leader-Follower Structure
BAIXiaoping WANG Zhuo HU Jingtao GAO Lei XIONG Feng
(Shenyang Institute of Automation,Chinese Academy of Sciences,Shenyang 110016,China)
With the improvement of the farm mechanization level,more‘corporate’style farming emerged.For example,more than one harvester collaborated with each other to complete the task of harvesting operations.The new‘corporate’style farming created several new challenges for the agricultural machinery navigation,and the group navigation was the trend of the development of agricultural machinery navigation technology.Group collaborative navigation control is the critical technical problem to be resolved.In order to solve this problem,a collaborative navigation controlmethod based on the leader-follower structure was proposed.Firstly,the harvester group based on master-slave structure was introduced,and a kinematics model of harvester group was established on the basis of kinematics analysis.Secondly,a formation keeping control law and a path following control law were designed on the basis of feedback linearization and slidingmode control theory.Finally,in order to verify the effectiveness of the proposed model and method,the formation experiments were carried out.When the leader and follower ran at speed of 1.0 m/s,the average error of the leader and follower were respectively 5.81 cm and 5.93 cm.The experimental results showed that the average navigation errors of the harvester group were similar to the average navigation error of a single farm machinery,and the proposed method could meet the harvester navigation demand.
harvester group;leader-follower structure;collaborative control;path following;formation keeping
TP24
A
1000-1298(2017)07-0014-08
2016-11-17
2016-12-20
国家重点研发计划项目(2016YFD0701903)和辽宁省科技攻关计划项目(2015104005)
白晓平(1986—),男,助理研究员,博士,主要从事农机导航研究,E-mail:baixiaopin@sia.cn
胡静涛(1963—),男,教授,博士生导师,主要从事农机精准作业控制技术研究,E-mail:hujingtao@sia.cn
10.6041/j.issn.1000-1298.2017.07.002
