果园升降作业平台自动调平控制系统设计
2017-07-31姜新宇
姜新宇 唐 娟
(河北农业大学 河北 保定 071000)
果园升降作业平台自动调平控制系统设计
姜新宇 唐 娟
(河北农业大学 河北 保定 071000)
果园升降作业平台是果树修剪和果实采收过程中使用广泛的果园作业机械,我国果树多种植于丘陵山地,由于地形结构复杂,果园升降作业平台在工作过程中是否能够保持水平状态就直接影响了果园作业人员的工作安全和效率。因此,本课题设计一种能够快速稳定调平作业平台的调平装置,来提高果园升降作业平台的水平调节稳定性,保障作业人员的安全和提高劳动舒适性。实验证明,本调平机构能够更高效的调节平台水平,适应更加复杂的地形。
果园;升降作业平台;折臂式;自动调平
1 引言
近些年来,水果的密集化种植,使人们对果园作业机械的效率和稳定性有了更高的要求。果园机械化水平得到了很大的发展,果园作业升降平台的使用率不断提高,而果园作业平台的调平性能直接影响着果园工作人员的工作安全和劳作舒适性。因此,对果园作业升降平台调平性能的提高具有十分重要的意义。本课题旨在通过单片机实现果园作业升降平台的自动调平,保障果园劳动人员的安全。
果园作业升降平台根据升降方式的不同可以分为剪叉式、伸缩式、折臂式和阶梯式四种类型。国外果园因为规划得当平整度和通过性比较好,故调平装置的性能要求不高,如澳大利亚CRENDON公司,英国N.P.SEYMOUR公司生产的采摘平台都不具备调平功能[1]。我国果园多位于丘陵山地,地形复杂。早期研制的LG-1型果园作业机、小型多功能遥控动力车等不具备调平功能。谢方平等人研制的小型果园作业升降平台采用手动调平方式[2~6]。几种类型的果园升降作业平台中,折臂式果园升降作业平台的作业面最为广阔,且操作简单,平衡性能好,因此得到了广泛的使用和发展。本课题即选用折臂式果园升降作业平台进行调平控制系统的设计。
随着电控技术的发展,果园升降作业平台的调平技术由最初的全手动调平到现在的可以全自动调平,实现了质的飞跃。而对于折臂式果园作业平台,先后出现利用平台自重的调平机构、平行四连杆调平机构、链条链轮式调平机构、静液压调平机构。电液调平机构是现在调平方式的主流,通过安装在工作平台上的水平传感器来感知平台的状态,并产生一个相应的电流,控制调平液压缸的动作,最终使平台保持水平[7]。随着传感器和专用芯片的使用,调平机构趋向于更加智能、更加迅速、更加稳定。
2 调平方案设计
2.1 调平原理。本调平机构旨在控制折臂式果园升降作业平台的完全调平,以保障果园作业人员的安全性和舒适性。通过在与平台直接相连接的操作臂上增加一个回转机构,来实现作业平台在左右方向的摆动调平。配合液压缸的伸缩使平台上下方向摆动调平,使平台达到水平状态。
平台工作方式设计为手动+自动。即平台的升降通过手动控制,平台的调平自动控制。如图1,上电后,平台首先初步自动调平,使平台初步为水平状态,当人员触发升降操作或转动操作时,位移传感器检测到信号,自动调平系统处于待命状态,当平台上升到合适的位置,调平系统检测位移传感器的状态确定到没有升降或旋转动作后再根据倾角传感器输出的信号驱动液压缸和液压马达动作,进行平台角度的微调,使平台在工作位置达到确实的水平。

图1 调平原理框图

图2 调平机构结构图
2.2 调平机构硬件设计。调平机构结构如图2,动力机构、回转机构、升降机构和液压控制系统通过紧固件连接在一起。升降或旋转操作的确定通过位移传感器来确定。角度检测采用动态倾角传感器,实时检测作业平台的倾斜角度,输出信号给单片机进行处理,再由单片机控制液压缸和液压马达进而将工作平台调平。
位移传感器选用米郎KTC直线位移传感器,具体参数如表1,通过对位移和长度进行直接测量,输出直流电压信号或电流信号,可以满足远距离传输控制要求,快速的将采集到的信号传送给单片机进行处理。较高的灵敏度足以保证在较短的时间内检测到升降信号,保证了调平过程中单片机能快速的接收信号并进行相应的指令。

表1 米郎KTC位移传感器参数
角度传感器选用动态倾角传感器VG400垂直陀螺仪。图3为倾角传感器连接MAX485电路图。VG400采用高质量和可靠性的MEMS加速度计和陀螺仪,并通过最优算法保证测量精度,通过多种补偿大大消除误差源,在恶劣的环境下仍能稳定运行,因此有效解决了调平机构在运动、振动过程中倾角传感器精度丧失的问题,并且消除了由于振动而产生的倾角传感器误报的问题,大大增加了调平系统的调平稳定性和准确性。

图3 倾角传感器连接MAX485电路图
本调平机构所使用的单片机选用STC12C5A60S2单片机,图4为单片机最小系统。该单片机有着体积小、重量轻、抗干扰能力强、扩展性能好、便于实现嵌入式应用等优点[8],其指令代码完全兼容传统8051单片机,而且几乎包含了数据采集和控制中所需的所有单元模块,能够对位移传感器和倾角传感器采集的信号进行快速处理,并下达相应指令。在本调平系统中单片机是整个硬件结构的核心控制部分。
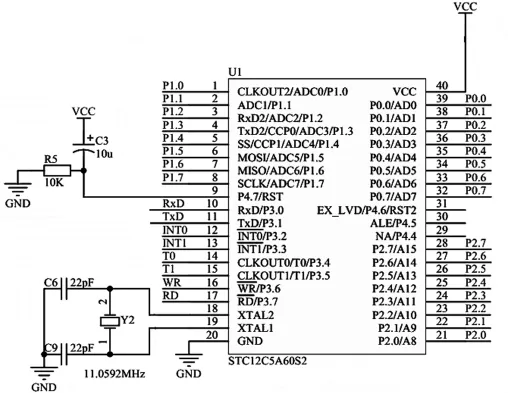
图4 STC12C5A 60S2单片机最小系统
液压油缸选用徐工液压件有限公司的高空作业车液压油缸,此类油缸产品标准化设计,焊接、防松等多项专利技术的应用,使产品更可靠。液压马达选用的BMHS马达,该液压马达采用镶齿式定转子副,正反转换向方便,保持性好。本调平机构中,液压缸和液压马达的选用本着工作稳定的原则,以保证调平过程的高效平稳,加快调平速度的同时增加调平过程中人员的安全性和舒适性。
2.3 调平机构软件设计。本调平机构系统控制如图5。系统上电后进行初始化,设置相关传感器和外围设备的参数。初始化结束后,首先进行平台的初步调平。初步调平结束后,当有升降或旋转平台的操作时,位移传感器产生信号,调平机构响应平台的升降或旋转操作,当动作结束后再根据倾角传感器的信号进行平台的最后调平。

图5 系统软件流程图
2.4 实验测试。测试时将本调平机构安装在一个平稳的可移动平台上,并将平台放置于斜坡模拟装置上。此斜坡模拟装置由四个支腿、支座和平台支架组成,支腿可在支座内上下自由滑动,调节螺栓可固定其在支座内的相对位置。通过调节各个支腿的长度模拟0~15范围内的任意复杂角度。