林肯自动化送丝机优化设计
2017-07-31梁梓廷刘海雄叶军
梁梓廷,刘海雄,叶军
(青海大学机械工程学院,青海西宁810016)
林肯自动化送丝机优化设计
梁梓廷,刘海雄,叶军
(青海大学机械工程学院,青海西宁810016)
为了配合送丝机构的部分结构调整,使得KUKA焊接机器人(KR 16 arc HW)与林肯多工艺焊机(Power Wave 455M)进行搭接。重新调整和设计林肯自动化送丝机(Power Wave 455M)底盘法兰的结构,调整后的送丝机结构不会对KUKA焊接机器人的运动造成干涉。并且为了体现送丝机外观的美观性和科学性,通过工业设计的方法优化设计解决了送丝机配合搭接弯板的使用问题,展现了工业美学。
林肯自动化送丝机;结构;底盘法兰;优化设计;工业美学
库卡机器人在全球被广泛的使用,在各行各业都有所体现[1]。林肯焊机操作简单、坚固耐用、性价比高,支持绝大部分的焊接工艺,主要应用在管道、造船工业、不锈钢以及双相钢和Cr-Mo耐热钢焊接中,均匀的输出控制,一致的焊缝外观,优秀的电弧表现和熔池的控制,卓越的电弧性能,使其成为电焊机行业的先驱和巨头。其分别生产的KUKA(KR 16 arc HW)与(Power Wave 455M)在焊接行业都有不错的表现。为了两者能搭接使用设计了一种搭接弯板。但是如果按照现有的林肯送丝机结构安装,将会对KUKA焊接机器人(KR 16 arc HW)造成干涉,因此调整林肯送丝机法兰盘的结构是必须的,通过检索没有发现具有直接指导性意义的资料,因此本文在参考林肯自动化送丝机设计结构[2]的前提下,根据实际设计的需要,对林肯自动化送丝机进行了改装。
对于设计而言使其最大限度不影响原产品的美观是符合设计美学要求的,因此使送丝机送丝机构更好的融入设备,配合KUKA焊接机器人的造型风格,这也是十分必要的。设计出符合工业美学的专属送丝装置,在外观造型上达到与KUKA焊接机器人浑然一体的效果才算一次成功的设计。
1 底盘法兰的设计
搭接弯板的形式决定了送丝机构的安装形式,这使得要将送丝机构的一些地方完全改动才能不干涉KUKA(KR 16 arc HW)焊接机器人的正常运动,故本次设计将送丝机构调整的结果是:进丝口变为出丝口,出丝口变为进丝口,通信口向后对调,进气口变成出气口,出气口变成进气口,通信电路板相对移位后固定,其中通信口、进气口、出气口的改动与底板法兰密切相关,所以进行底板法兰的再设计是需求所致。而三个口的改动影响到了通信电路板的固定位置,为了保障通信电路板不受损,也需相应改变它在通信罩上的固定位置,这在原有通信罩上就可钻眼实现,无需重新设计,如图1(a)所示为改装前的送丝机的结构位置图,而图1(b)为改装后的送丝机的结构图。从两图的对比中可以看出原送丝机左侧较高部分会对KUKA机器人的机械臂造成干涉而对调之后,干涉消失。
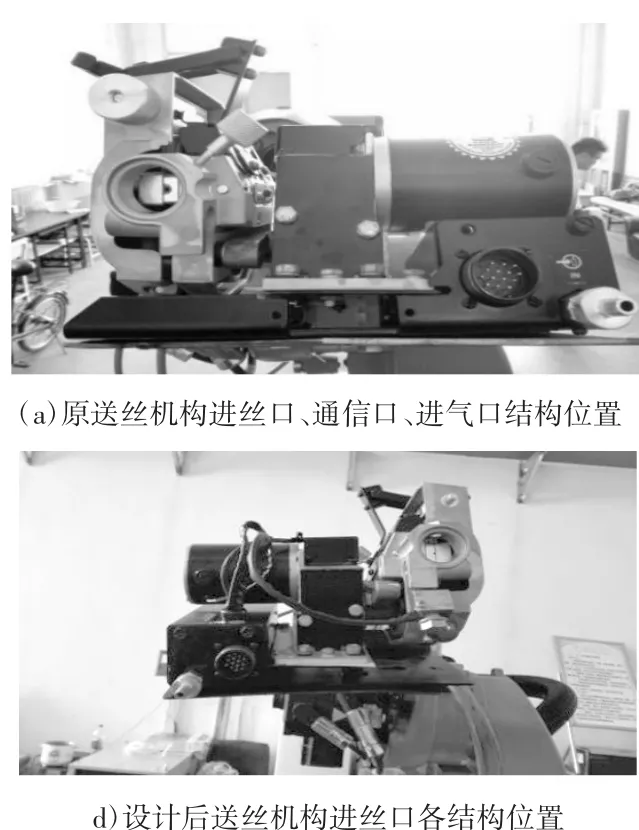
图1 送丝机再设计前后对比图
材料选择与制作过程:
原底板法兰是一块Q235钢,它的钣金造型是在模具上冷冲压出来的,虽然造型比较简单,但是折弯面平整无变形,折弯半径均匀标准,因此在折弯面的一些边角地方还进行了倒角处理。为了和原底板法兰基本保持一致物理性能和力学性能,底板法兰的再设计依旧选择用Q235钢。按加工思路,板材在液压联合冲剪机上下料后,先定形再钻孔最后将其折弯。
(1)轮廓加工方式。一块无损3 mm Q235钢板在液压联合冲剪机上下料,再用电火花线切割切除一块长297 mm、宽258 mm的板材,并在这块板材上把钣金的整个外轮廓按实际尺寸切出来(包括倒角部分)。
(2)孔加工方式。因为摇臂钻床只能钻圆形的小孔,无法加工五角边形的孔和两角边的孔,也无法加工大的圆孔,因为钻头的外径不够。所以孔的加工分成了两组,第一组是比较特殊的孔位,先用样冲打眼,然后在摇臂钻上对准样冲点钻小孔(一般为与特殊孔位同心或正中的3 mm小孔)以作定位,待电火花线切割完整个外轮廓后,先断丝再从定位小孔穿丝形成回路,丝从同心圆中心位置开始计算走丝,然后切割运行,完成后用同样的断丝穿丝方法重复切孔。第二组是将螺钉连接孔等规范孔位用摇臂钻床完成,也经样冲打眼定位,用适合孔位大小的钻头完成,在钻孔时,底板法兰底下垫了一块矩形柱状木块,防止钻孔时钻头产生的应力集中导致的变形,还为防止发热烧灼在钻头上涂刷冷却液,有效保证了法兰的平整性和孔的美观性。
(3)法兰折弯方式。采用加热软化后钳工钣金的方法加工法兰弯板,先将底板法兰夹持在台钳上,夹持时靠一个同样宽的矩形木块,在木块上放一个半径为5 mm的铁棒料,一起被台钳夹紧,然后沿着画线用喷焊烤红,用扳手掰弯,并用锤子敲打使其沿圆棒料贴合折弯,保证了折弯半径的均匀标准,实现了圆滑过渡,折弯后拆除夹持使其缓冷,冷却后用金刚锉将边缘圆角化,到此底板法兰的加工完成。
2 送丝装置外观3D模型设计分析
2.1 造型应用分析
给一个运动体上的机构造型,要从工业美学角度设计体现它的机械美观,将它设计成和KUKA机器人风格统一的造型,它不能对机器人的运动造成干涉,这种干涉可能会来自自身尺寸的大小、自身的不稳定性、自身重量的压力、自身造型的浮夸和不实际、自身造成送丝机构打开不便等方面。
基于此,通过采集林肯焊机通用的自动化送丝机(Power FeedR 10R)关键位置的实际尺寸,从与底板法兰的连接处做起,主要运用钣金特征和曲面特征造型,加入KUKA机器人的造型风格,基本贴合送丝机构外露零部件的形体,不强取KUKA机器人与送丝机构之间的活动间隙,不占据其他多余位置,自下而上、自后向前,在实际尺寸的驱动下,结合装配关系最终完成了1 mm厚的送丝装置3D外观造型,轻巧紧凑。
盖子与壳身用合页铰接,采用二级盖形式,在合盖时有定位销定位,合上后有卡子紧扣,既保证了送丝装置造型对送丝机构绝无干涉,又保证了KUKA机器人在运动中绝不会引起盖子的晃动和掉下;在与接到送丝机构上的主要线孔之间采用了豁口安装的造型设计。
2.2 功能应用分析
(1)从整体来讲,它是一个负责包裹送丝机构的外壳,由于在外观造型上反映了一定的机构属性,所以在视觉上有很好的信息反馈,且能与KUKA焊接机器人在造型上流畅过渡。
(2)从接线口的预留孔位来讲,它是一个负责将这些接线口裸露在壳体外面实施插接装配的通道,既能有效插接,又能互不干涉,体现了壳体设计的适应性和合理性。
(3)从二级盖来讲,它是一个可以响应机构需求随时开关的结构,负责送丝机核心机构的包裹和打开,两个合页铰接实现了送丝机构在不拆卸的情况下完全满足对焊丝及啮合齿轮情况的检查要求,在操作上这种结构设计表达了合理地顺序原则如图2所示。


图2 送丝机构开盖需求
(4)从二级盖的卡扣、勾子和定位销来讲,它是一个负责将盖子对齐后进行固的机构,能使盖子在机器人的运动中保持稳定不晃动,体现了密斯凡德罗“少就是多”的原则;从二级盖的标识来讲,它是一个可以反映壳内机构归属的窗口,负责传达送丝机构及其相关设备的厂商信息,很容易就能让人实现从局部到整体的联想,应用了视觉传达的设计理念。2.3材料选择与制作工艺分析
在送丝机构和接线端部磨合上会比较流畅坚韧,在合页、销钉等的加工上相对比较轻松,但是在整个壳体和盖子的选材和加工制作上会面临困难,诸如:材料既要有可塑性、抗拉性、抗冲击性、强度高,又要专门设计适合此款造型的相应制作模具,牵扯到的加工工艺比较复杂。
选用塑料制作会易于实现。塑料(Plastics)作为一种具有多种特性的使用材料,其原料广泛,性能优良,加工成型方便。其性能适用范围广,成本低;质轻,耐振动与冲击,比强度高;电、热绝缘性好;成型加工方便[3]。
其中有两种塑料的综合性能比较符合送丝装置外观的加工制作:
(1)PVC,聚氯乙烯,热塑性材料,具有良好的电绝缘性和耐化学腐蚀性[4],但热稳定性差,其中,硬质聚氯乙烯塑料机械强度高,柔韧性好,有较好的抗拉、抗弯、抗压和抗冲击能力[5],不吸水、可钻、可锯、可刨、易于热成型、热弯曲加工等特性,经久耐用,而且价格便宜,可用于生产制作结构件、玩具、管材、壳体、板材等[6]。
(2)ABS,丙烯腈-丁二烯-苯乙烯三元共聚物,抗冲击强度高、热变形温度高、轻便、表面硬度大、易清洁处理、尺寸稳定、抗蠕变性好,可进行锯、钻、挫、磨等机械加工,可用三氯甲烷等有机溶剂粘接,可进行涂饰、电镀等表面处理。主要用于制作电器壳体、箱体、零部件、低发泡品(合成材料)等[6,7]。
综上所述,送丝装置外观造型按实际操作来讲,最佳材料选择为:主体用ABS塑料;卡扣、勾子、合页、销钉、定位销用轻质不锈钢金属;所有的接触边线上电镀一层耐磨耐腐蚀金属铁;标识用精雕在金属上刻出来,再用粘接剂粘接到ABS塑料盖子上。这样的材料选择既满足了材质的需求又符合了工艺的需求,还能保证它的使用年限,方便日常维护,又可以凭借图纸和说明进行再生产。
3 部件的3D建模图
改动后的林肯自动化送丝机的法兰底盘结构如图3所示,其底部重新设计的四个孔可以与搭接弯板的托板上面的开孔进行连接。两侧的设计是配合通信口、进气口、出气口等改进后所得到的结果。为了整体的完整性,所设计的送丝机装置外形如图4所示,它能够将重新设计后的送丝机完整的保护起来,并且使得与KUKA机器人更加的浑然一体。

图3 底板法兰——建模图

图4 送丝装置造型——建模图
其二级盖的开合方式如图5所示,可以方便地对送丝机进行相应的操作。

图5 送丝装置造型——一级盖和二级盖的打开方式
4 结束语
(1)底板法兰的设计实际上是对原底板法兰的改造,因为送丝机构的改动引起了底板法兰孔位的改动,所以再设计体现的是孔位的调整设计,为的是迎合送丝机构的变化。
(2)送丝装置外观造型的创新设计,实际上是对外观造型的准确把握和功能属性的准确体现,通过造型分析、色彩分析、功能分析、材料分析等有效分析,将其运用于实际需求环境中,完成它的产品使命,这种设计方法和设计思路其实是对产品全生命周期管理的一个简单体现。
[1]李劲松.基于PUMA560工业机器人惯量前馈技术仿真研究[D].天津:天津理工大学,2015.
[2]AutoDrive 4R100&4R220.The Lincoln Electric Company. [DB/OL]http://www.lincolnelectric.com.cn/uploadfile/201508/ 150813021648.pdf
[3]邓小姝.现代家具设计中的材料应用研究[D].保定:华北电力大学,2007.
[4]侯云芬.建筑装饰材料[M].北京:中国水利水电出版社,知识产权出版社,2006.
[5]黄晓燕.塑料成型工艺及模具设计技术问答[M].上海:上海科学技术出版社,2007.
[6]江湘芸.设计材料及加工工艺(修订版)[M].北京:北京理工大学出版社,2010.
[7]张锡.设计材料与加工工艺[M].北京:化学工业出版社,2004.
Optimum Design of Lincoln Automation Feeder
LIANG Zi-ting,LIU Hai-xiong,YE Jun
(Qinghai University College of Mechanical Engineering,Xining Qinghai 810016,China)
In order to cope with the structural adjustment of the wire feed mechanism,so that the KUKA Welding Robot(KR 16 arc HW)and Lincoln Multi-Process Welder(Power Wave 455M)(Power Wave 455M)can connect.The chassis flange structure of Lincoln automation feeder is re-adjusted and designed.The adjusted wire feeder construction does not interfere with the movement of the KUKA Welding Robot.And in order to reflect the aesthetic and scientific of the feeder’s appearance.The optimized design solves the problem of connection bending plate that is used on automation feeder by industrial design method,in which shows industrial aesthetics.
lincoln automation feeder;structure;chassis flange;optimum design;industrial aesthetics
TH122
A
1672-545X(2017)06-0013-03
2017-03-16
青海省科技厅高新技术研究与发展计划资助项目(编号:2014-GX-212);青海大学教育教学研究项目(编号:JY161735)
梁梓廷(1996-),男,山东临沂人,本科,主要研究方向为数字化设计与制造;刘海雄(1962-),男,陕西华阴人,教授,硕士生导师,主要研究方向为数字化设计与制造、信息系统设计。
