基于模糊神经网络的电力巡线无人机避障技术研究
2017-07-25邴丽媛刘智蒋余成
邴丽媛,刘智,蒋余成
(长春理工大学 电子信息工程学院,长春 130022)
基于模糊神经网络的电力巡线无人机避障技术研究
邴丽媛,刘智,蒋余成
(长春理工大学 电子信息工程学院,长春 130022)
随着国民经济持续稳定快速发展,,输电线路的巡检工作量日益加大,传统人工巡检已经不能满足当前输电线路巡检的需求。无人机电力巡线能够较好弥补人工巡检的不足,提高电力巡检作业的工作效率。为了获得精确的无人机与输电线路、杆塔以及附近障碍物的距离信息,采用了多传感器融合技术,通过对巡检过程中可能出现的障碍物进行建模,建立最小安全空间模型和输电线路周围电场模型,提出基于模糊神经网络的方法,对无人机电力巡线的避障技术进行了研究。仿真结果表明,该方法可以有效实现无人机在电力巡线中对障碍物的躲避。
无人机;电力巡线;避障技术
经济社会发展对电力能源的需求急剧增加,我国电力传输线路规模不断扩大,对电力传输线路的安全保障问题日益突出。由于国土辽阔,地形复杂,平原少、丘陵及山区较多,气象条件复杂,瓷绝缘子质量不够稳定,为确保电力传输线路的安全与稳定运行,迫切需要对其进行不间断的巡视与监测[1-3]。输电线路巡检的重点有基础及接地部分、电气设备、附属设施、防护设施及线路通道等部分。输电线路的巡视手段有人工巡视、直升机巡视和无人机巡视。无人机具有重量轻、体积小、便于携带、成本低、灵活性好等特点,与各种可见光和红外探测设备搭配后,可以执行高效、非接触式、全方位的电力巡线任务,作为一种现代化、自动化的手段,能够较好弥补人工巡检的不足,也可以克服有人驾驶直升机电力巡线的使用及维护成本高、安全问题突出等弊端[4],在国内外得到了较广泛的应用。
为了便于输电线路和杆塔上故障分析诊断,无人机在执行巡线任务的过程中需要对线路全程、杆塔及周边环境和设施进行高清晰度图像拍摄,难免会遇到障碍物,并因此出现偏离预定航向的情况,也有可能造成无人机与输电线路或其他障碍物的碰撞[5],影响已有线路的安全运行,甚至威胁国家公共财产安全。因此,为确保无人机在执行电力巡线任务过程中的安全和高效,需要使其对各种障碍具备较强的探测识别和规避能力。
1 最小安全空间与输电线路周围电场建模
无人机在对输电线路进行巡检时,需要根据输电线路的电气特性以及运行规程的规定,对架空输电线路经过的区域空间可能遇到的障碍物保持一定的安全距离,避免与任何障碍物发生碰撞,保证输电线路与无人机的安全。我国国土面积辽阔,地形种类复杂,导致输电线路的分布遍及山地、盆地、丘陵、平原、高原等地区,因此,输电线路周围环境复杂多样,除了电力线和杆塔本身,无人机还可能遇到交叉跨越线、树木、建筑物、山坡、峭壁、岩石、管道、索道及各种架空线路等障碍物。
1.1 最小安全空间的建模
根据这些障碍物的外形特征,建立了无人机电力巡线最小安全空间模型。如图1-3所示。

图1 障碍物建模

图2 外形轮廓有弧线的障碍物
无人机在进行电力巡线作业之前,需在地面监控站的PC机上下载该次巡线任务的电力线路及杆塔位置的二维电子地图。在此二维电子地图上建立最小安全空间模型,其步骤如下:
(1)障碍物轮廓的处理
障碍物轮廓的直线段部分不进行处理,直接保留其直线;针对障碍物轮廓中的曲线段部分,均匀地在曲线部分取若干个点,过这些点做本段曲线弧的切线,每两个相邻点的切线段定会相交,用各个切线相连来代替原来的曲线弧。
(2)避障边界线的建立
经过前面的步骤后,障碍物的轮廓就只有直线构成。为保障无人机的安全,防止其与障碍物发生碰撞,这里在无人机与障碍物之间设置一个安全距离,使无人机在进行电力巡线任务时始终与障碍物之间保持的距离要大于或等于此安全距离。此安全距离是根据无人机的大小确定,并将其记为Dis,且有Dis>0。将第三步骤中建立的障碍物外形轮廓向外平移Dis大小的距离,平移后的轮廓线即为最小安全空间避障边界线,避障边界线的各顶点记为Pi。
(3)最小安全空间的建模
将上述建立的避障边界线沿垂直方向拉伸,拉伸高度记为Hd,且要求Hd>0,拉伸后的高度记为H,则:

其中,h为障碍物相对于地面的海拔高度。
这样,形成的空间即为无人机电力巡线时的避障最小安全空间,其各顶点记为Pi。

图3 最小安全空间
1.2 输电线路周围电场建模
以500kV单回三相水平排列的输电线路为例,设导线高度为14.56米,分裂导线半径为0.283米,导线间距为14.62米,利用计算机软件编程对其进行仿真,得到了该例的输电线路周围电场分布的情况如图4所示,为电力巡线无人机自动避障接下来的研究奠定了基础。

图4 电场仿真结果
2 电力巡线无人机避障方案分析
2.1 无人机避障技术传感器选型
目前,应用于无人机避障技术的传感器有很多种,其中,红外传感器、视觉传感器、毫米波雷达、激光雷达、超声波传感器、电磁场检测传感器、全球定位系统(GPS)是比较常用的测距传感器。红外传感器是通过发射与接受红外线来实现对周围物体距离的探测,其受外界环境影响较大,尤其是白天光线较强时,其测量精度大大下降,在有灰尘、烟雾时的性能也较差,一般被用在机器人近距离避障中,并不适合用在无人机电力巡线中。视频传感器用在无人机避障中,主要是采用视频摄像头获取图像信息,通过传输网络把这些信息传送到地面站的PC机,由工作人员操控无人机的避障,并不能脱离工作人员达到无人机自动避障功能的实现。毫米波雷达具有重量轻、体积小的优点,在距离较远时仍能具有较好的探测性能,受环境影响较小,但是在障碍物较小,距离较近时并不能实现测距功能,一般被广泛应用于军事领域,如导弹、制导武器和战斗机等军用装备,并不能满足电力巡线所用的小型、旋翼无人机的避障要求。
超声传感器是一种主动式传感器,其工作原理是通过发射器发射超声波,接收器会接收到超声波遇到障碍物返回的返回波,通过测量从发射到返回至接收器的时间差来实现距离的转换。超声波测距传感器具备信息处理简单、快速,成本低等优点。
激光雷达传感器的原理与超声波传感器相近,不同的是其发射的信号是光波。激光器能够产生并发射一束激光脉冲,打到障碍物上且有部分会反射回来,接收器会接收这部分反射激光脉冲,并能够精确的测出激光脉冲从发射到被接收所用的传输时间。因为激光脉冲以光速传输,光速是已知的,传输时间就可以被转变成对距离的测量。该方法有高性能、低成本、体积小、质量轻、功耗低、实时性好等优点。
高压线附近的电磁分布具有一定的规律,电磁检测传感器正是根据这种规律测量无人机距离输电线的距离。例如,115kV的高压输电线,靠近输电线处的电场强度为1.0kV/m,磁感应强度为20mG;距离输电线15m处的电场强度接近0.5kV/m,磁感应强度为5mG。电磁检测传感器的抗静电干扰能力强,灵敏度高,满足无人机对传感器的要求。
GPS是全天候、全方位、全时段、多功能、高精度的卫星导航系统。在应用GPS定位时,需安装GPS接收模块,便可接受到卫星发射的数据信号,并运用数学方法求得三维空间位置。
2.2 电力巡线无人机避障方案设计
综上所述,提出了基于多传感器融合技术的无人机自动避障技术研究,多传感器融合技术较好的弥补了单一传感器探测信息的不确定性。该避障技术是由机载信号探测模块和机载飞控内部的紧急避障模块组成。多种测距传感器获得的原始数据进行融合处理,再将得到的融合结果进行预处理,经过信号预处理的距离信息再通过通讯端口与紧急避障模块相连,紧急避障模块与无人机动力装置相连,最终飞机做出相应的避障动作。图5即为无人机避障框图。

图5 避障框图
3 基于模糊神经网络多传感器融合方法的无人机避障技术
无人机电力巡线过程中环境复杂多变,通常很难建立一个精确的数学模型来具体描述。而模糊逻辑理论具备适应环境变化的能力,不需要建立数学模型,在本质上能够控制非线性系统[6]。模糊逻辑可以利用简单的设计完成复杂的问题,对不确定性系统容易控制,抗干扰能力强,响应速度快,具有很好的鲁棒性和适应性。它以隶属函数的形式来描述对实物的模糊性,模仿了人的思想,采用与人类语言相似的模糊语言进行推理,但模糊控制系统的自学习和自适应能力较差。模糊逻辑可以控制那种只可凭经验控制、又难以准确地建立数学模型的系统[7]。而神经网络能够映射任意函数关系,自学能力强,弥补了模糊逻辑的不足。
3.1 数据预处理
无人机电力巡线要求传感器测量范围较大,灵敏度高,当障碍物距离无人机较近时,传感器容易受其影响。因此,传感器采集到的原始数据需要经过预处理,才能去除噪声的影响。
(1)去除在传感器测量范围以外的数据:根据传感器的作用范围设置两个筛选算子ζ1和ζ2,当传感器测量的数据小于ζ1时,按ζ1处理数据;当传感器测量的数据大于ζ2时,按ζ2处理数据。
(2)弱化突变数据:传感器之间存在互相的干扰会导致数据的突变,如果不对突变数据进行及时处理,会导致无人机的避障策略发生很大的偏差。
3.2 输入、输出的模糊化
输入、输出量的模糊化就是把多传感器探测到的确切信息转化成模糊量,输入信息包括超声波传感器、激光雷达传感器、电磁场检测传感器和GPS接收模块提供的无人机的位置和距离障碍物的信息。图6为传感器位置示意图。其中黑色方块代表波传感器,分别位于无人机的左前方、右前方、左后方、右后方、前方、后方、左方、右方、内部,分别标记为1、2、3、4、5、6、7、8、9。其中1、2、3、4为超声波传感器,5和6为电磁场检测传感器,7和8为激光雷达传感器,9为GPS接收模块。

图6 传感器位置示意图
在上述传感器探测到数据后先按照3.3.1节中的处理办法进行数据预处理,然后,设4个超声波传感器经过处理的数据信息分别为d1,d2,d3和d4;由于无人机在进行电力巡线之前,需要在无人机飞控内下载电力杆塔和输电线路的位置信息和输电线路周围电磁场的分布情况信息,再根据无人机进行电力巡线时电磁场检测传感器检测到的电磁场强度值与预先建立的电磁场模型进行对比得到距离信息经过处理的数据信息为d5和d6;激光雷达传感器经过处理的数据信息为d7和d8;GPS接收模块收到无人机的经纬度坐标与输电线路的坐标对比、计算,得到无人机与电力杆塔和输电线路之间的距离信息经过处理的数据信息为d9。
为了防止某个传感器突然发生故障而不能工作,把在一个方向上的几个不同类传感器作为一组,来预防和减小系统的误差,故将9个传感器探测值分为6组作为模糊控制器的输入量x1,x2,x3,x4,x5,x6,分别代表前方、左方、右方、后方、上方和下方,并且有x1={d1,d2,d5},x2={d1,d3,d7},x3={d2,d4,d8},x4={d3,d4,d8},x5={d5,d7,d9},x6={d6,d8,d10},其中x1的计算公式如下:

式中,α1,α2和α3是权值系数,α1,α2,α3≥0且α1+α2+α3=1。其他组的输入量x2,x3,x4,x5,x6的计算方法同理于x1,不再赘述。
输出量为无人机飞行的方向和速度,分别记为y1,y2。
对于输入量x1,x2,x3,x4,x5,x6,将其模糊语言变量设置为{JIN,ZHNG,YUAN}={近,中,远},其中,JIN:[0,3]m,ZHONG:[3,6]m,YUAN:[6,+∞)m。
对于输出量y1的模糊语言变量设置为{Q,ZQ,YQ,Z,Y,H,S,X,QS,QX}={前,左前,右前,左,右,后,上,下,前上,前下},y2的模糊语言变量设置为{MAN,ZHONG,KUAI}={慢,中,快},其中,MAN:[0,2]m/s,ZHONG:[2,4]m/s,KUAI:[4,6]m/s。
3.3 建立模糊控制规则
由上节可知,本系统共有六个输入量,分别代表无人机的前方、左方、右方、后方、上方和下方,两个输出量,分别代表无人机飞行的方向和速度,其结构图如图7所示。
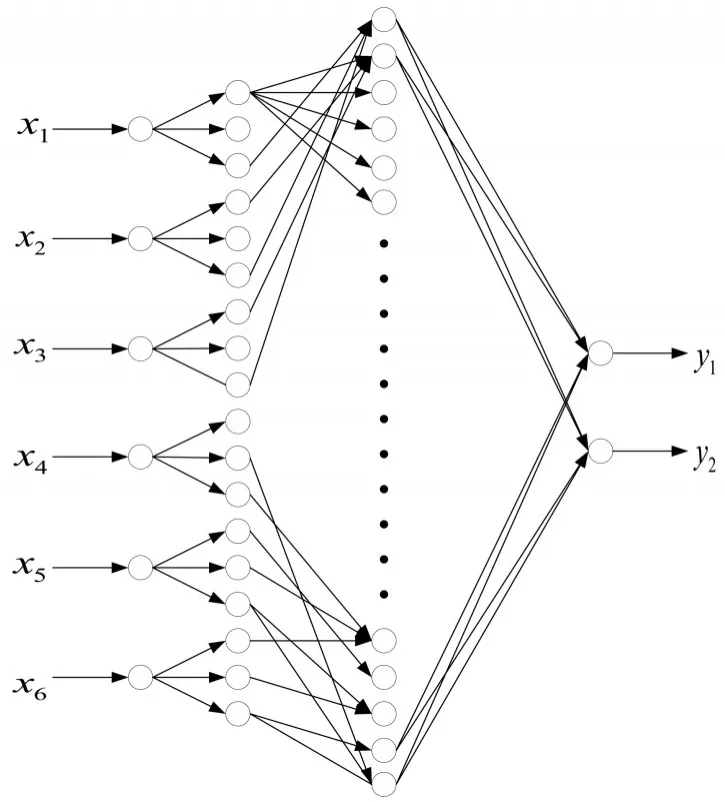
图7 模糊神经网络结构图
模糊规则共分为六种情况,分别是1)无障碍物情况;2)只有一个方向有障碍物;3)有两个方向有障碍物;4)有三个方向有障碍物;5)有四个方向有障碍物;6)有五个方向有障碍物。
(1)无障碍物情况
当探测环境中没有障碍物或离障碍物很远时,无人机根据目标点的位置继续前行慢速向前飞行,模糊规则如下:
如果x1为YUAN,x2为YUAN,x3为YU⁃AN,x4为YUAN,x5为YUAN,x6为YUAN时,那么y1为Q,y2为MAN;
(2)只有一个方向有障碍物
当探测环境中有一个障碍物存在时,无人机根据目标点的位置,判断去人机的转向,使无人机朝着目标点的方向前进并避开障碍物。模糊规则如下:
当无人机前方出现一个障碍物时,无人机根据目标点的位置,使无人机朝着目标点的方向前进并避开障碍物,若左方没有障碍物或障碍物较远时,优先考虑向左转,模糊规则如下:
如果x1为ZHONG,x2为YUAN,x3为YU⁃AN,x4为YUAN,x5为YUAN,x6为YUAN,那么y1为Z,y2为ZHONG;
如果x1为JIN,x2为YUAN,x3为YUAN,x4为YUAN,x5为YUAN,x6为YUAN,那么y1为Z,y2为KUAI;
按照上面的方法,共建立了665条模糊规则,在此就不一一列举了。
4 仿真实验及结果分析
根据上文所建模型与模糊控制规则,对无人机电力巡线时的自动避障进行了计算机仿真对比实验,在无人机飞行路线的左、右两侧分别布置了三个大小不一的非对称形多边形障碍物,飞行区域设置为100m*100m,设置速度V=2m/s。在无人机的预定轨迹附近设定了3个障碍物,如图8所示。图中,无人机跟踪输电线路进行电力巡检,在输电线路上方飞行,并与输电线路保持5m的距离,所有障碍物设置在输电线路的上方,其中下方最粗的直线代表输电线路,无人机跟踪输电线路从起始点飞向目标点,多边形代表障碍物,较细虚线代表预定轨迹,弯曲实线代表无人机的实际飞行避障路径,弯曲虚线代表对比实验室中的另一组无人机飞行路径,该实验室中,用超声波传感器代替了激光雷达传感器,即只使用超声波传感器,电磁场检测传感器和GPS三种传感器,其他实验条件不变的情况下得到的无人机避障飞行路径。

图8 避障仿真对比图
通过分析仿真结果可以得出,用超声波传感器代替了激光雷达传感器,近距离内没有障碍物和开始能够探测到障碍物在靠近时两条飞行路径基本一致,过一段时间后,无人机快要飞行到障碍物距离输电线路最远端点时,两条路径开始出现差异,使用四种传感器时的避障飞行路径总长度明显短于激光雷达传感器被超声波传感器代替后的无人机避障飞行路径,可以大大降低无人机的功耗,提高无人机电力巡线的工作效率。
5 结论
通过研究无人机电力巡线的特征,分析无人机在电力巡线过程中可能遇到的障碍物,对比现有的无人机避障技术,提出了基于多传感器融合的无人机电力巡线避障技术方案,通过获取无人机与周围障碍物精确的距离信息,并采用模糊神经网络的方法,有效地实现了电力巡线中障碍物的规避,极大地提高了避障实施效率,同时缩短了避障行进的路径长度,因此也降低了无人机的能量消耗。本算法的应用能够有效增强无人机在电力巡线过程中的避障能力,进而提高无人机电力巡线续航能力和工作效率。
[1] Wang B,Han L,Zhang H,et al.A flying robotic system for power line corridor inspection[J].IEEE Internation⁃al Conference on Robotics and Biomimetics,2009(09):2468-2473.
[2] 厉秉强,王骞,王滨海,等.利用无人直升机巡检输电线路[J].山东电力技术,2010(1):1-4.
[3] Binhai Wang,Xiguang Chen,Qian Wang,et al.Power line inspection with a flying robot[C].In Proc.the 1st International Applied Robotics for the Power Industry,2010.
[4] 陈天华,郭培源,周鹰,等.一种自主飞行的小型飞行机系统设计[J].航空精密制造技术,2006,42(4):55-59.
[5] Call B,Beard R,TaybrC,et al.Obstacle avoidance for unmanned air vehicles using image feature tracking[C]. AIAA Guidance,Navigation,and Control Conference,2006:3406-3414.
[6] 陈超超.轮式移动机器人避障的研究[D].秦皇岛:燕山大学,2004.
[7] 袁新娜.基于多传感器信息融合技术的智能小车避障系统研究[D].太原:中北大学,2010.
[8] 邴丽媛.基于多传感器融合的无人机自动避障技术研究[D].长春:长春理工大学,2017.
Research on Obstacle Avoidance Technology of Unmanned Aerial Vehicle in Power Line Inspection
BING Liyuan,LIU Zhi,JIANG Yucheng
(School of Electronics and Information Engineering,Changchun University of Science and Technology,Changchun 130022)
With the sustained,the scale of power grids in our country is expanding day by day,and the inspection workload of transmission lines is also increasing,traditional manual inspection has been unable to meet the requirements of the current trans⁃mission line inspection.UAV power line can make up for the lack of manual inspection,improve the work efficiency of power in⁃spection.In order to obtain accurate UAV and transmission line tower and near the obstacle distance information,multi sensor fu⁃sion technology is adopted,by modeling the possible obstacles in the process of inspection,to establish the minimum safe space model and the electric field distribution model of power line.Propose the method of obstacle avoidance based on fuzzy neural net⁃work and study the obstacle avoidance technology.The simulation results show that the method can effectively avoid the obstacle in the power line.
unmanned aerial vehicle(UAV);power line inspection;obstacle avoidance technology
V279
A
1672-9870(2017)03-0098-05
2017-01-09
邴丽媛(1992-),女,硕士研究生,E-mail:294264633@qq.com
刘智(1971-),男,博士,教授,E-mail:2311547@qq.com
