基于单片机的自动驾驶系统的设计与实现
2017-07-25王梓霖孙昕沈阳工学院信息与控制学院
王梓霖 孙昕 沈阳工学院信息与控制学院
基于单片机的自动驾驶系统的设计与实现
王梓霖 孙昕 沈阳工学院信息与控制学院
本文设计了一个基于STC89C52RC单片机的无人驾驶系统。该系统根据超声波测距原理,辅以电机驱动系统,配以数码管显示功能,通过芯片的控制,实现无人驾驶主要功能,同时配以雾天自动开启雾灯、雨天自动开启雨刷的辅助功能。
1 概述
本文使用小型直流电动作为动力装置,实现小车直线行走功能;使用超声波测距来达到避障的目的;根据空气相对湿度大于80%对雾天进行模拟,空气相对湿度达到85%对雨天进行模拟。整合超声波模块、数据比较模块、电机驱动模块、湿度检测模块,最后由单片机STC89C52RC进行控制。
2 硬件设计
2.1 驱动模块
驱动模块包括电机直流电机和驱动芯片两部分,其控制电路如图1所示。
2.2 壁障模块
无人驾驶系统的障碍物检测模块由舵机和超声波模块组成,将超声波测距模块连接到舵机上,利用舵机的旋转和位置保持功能,使超声波模块的朝向得以改变,以便达到实时、多方向检测的目的,使小车可以自主、智能的选择行驶方向,能够提前停止行驶,以免与障碍物发生碰撞,增加无人驾驶小车在行驶中的安全系数和整体的智能等级,其模块原理图如图2所示。
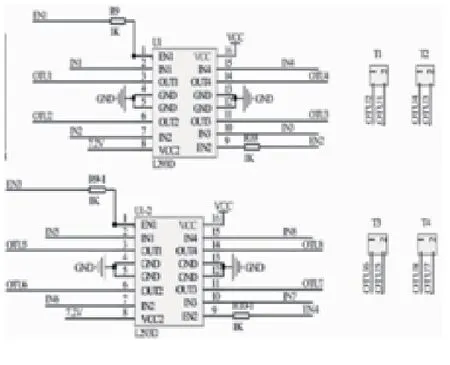
图1 L293D控制电路电路图

图2 超声波模块原理图
2.3 温湿度检测模块
温度的计算需要用公式将测量的数值转化为成整的温度值,应用的公式如公式(1)所示:湿度转换方法如公式(2)所示:


相对湿度根据上述公式算出来之后,还需要考虑当前环境温度而进行适当的补偿。补偿的公式及其参数选择如公式(3)。

3 软件设计
本次研究的软件程序在keil4的环境下编程,软件流程设计包括障碍物检测模块设计和湿度检测模块的设计,其流程图如图3、4所示。
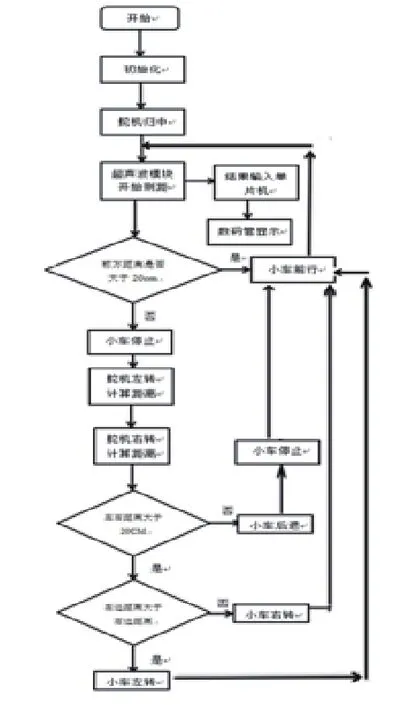
图3 避障模块流程图

图4 湿度检测模块流程设计
4 结论
本文对永磁电机进行了计算与分析,得出了电机磁场分布,通过场路结合的方法计算了,永磁同步电机的电枢反应电抗值,通过伏安法进行实验测试,通过结果对比可知,直轴电抗的计算误差为0.2%,与实验结果相近,但是交轴电抗的计算误差为14.5%,相对于直轴的计算结果偏大,但是对于工程设计来说,亦可满足工程需要,因此应用该方法计算电枢反应电抗是可行的。
本文从硬件设计和软件设计两大方面,对无人驾驶系统进行了设计,实现了自动行驶、自动避障、自动开启雾灯、自动蜂鸣器报警的功能,达成了实验目的,完成了本次的基于单片机的无人驾驶系统的设计。
孙昕(通讯作者),沈阳工学院信息与控制学院副教授,研究方向:电机及电器自动控制。
