基于Agent的电液复合制动系统防抱死控制研究
2017-07-20牛礼民周亚洲杨洪源
牛礼民 周亚洲 杨洪源
安徽工业大学机械工程学院,马鞍山,243002
基于Agent的电液复合制动系统防抱死控制研究
牛礼民 周亚洲 杨洪源
安徽工业大学机械工程学院,马鞍山,243002
针对纯电动汽车电液复合制动系统电机再生制动力与液压制动力动态响应特性的差异及其非线性特性问题,提出了一种基于Agent的电液复合制动防抱死控制方法。构建了由电机Agent、液压制动Agent和ABS Agent组成的复合制动系统,依据让步策略、竞争策略和协同策略对电机再生制动力和液压制动力协调分配。MATLAB/Simulink仿真结果表明:紧急制动状态下,各Agent间能有效协作,前轮始终先于后轮进入抱死趋势,复合制动系统可以准确识别路面附着系数变化并及时调整电机制动力与液压制动力,提高了制动稳定性与系统的自适应能力。
纯电动汽车;电液复合制动;Agent;防抱死;协调控制
0 引言
防抱死制动系统(anti-lock braking system, ABS)作为车辆主动安全装置,能够保证车辆制动过程的稳定性与安全性。具备再生制动功能的纯电动汽车(BEV)对当前车辆控制系统提出了更高的要求,其电液复合制动系统及相关关键技术一直是当前的研究热点[1-2]。
纯电动汽车电液复合制动系统由电机再生制动和液压制动两个子系统构成,正常制动时能够有效回收损失的动能,但在紧急制动时电机转矩特性与液压制动器响应特性存在明显差异,合理协调两者以保证防抱死制动的稳定性是复合制动系统的关键。目前,电液复合制动防抱死控制方法主要有逻辑门限值控制[3]、模糊控制[4-5]、滑模控制[6-7]和最优控制[8-9]等方法。逻辑门限值控制实际应用较多,但仍需要先验知识的积累,模糊控制较依赖经验,两者对路面附着系数突变的自适应较差;滑模控制和最优控制鲁棒性较好,对参数变化不敏感,但在防抱死制动阶段,均不能有效协调电机制动力和液压制动力来使前后轮滑移率得到合理分配以保证制动稳定性。
综上,为提高纯电动汽车防抱死制动过程的自适应性和稳定性,提出了一种基于Agent的电液复合制动防抱死控制方法。首先分析车辆制动模型,根据电液复合制动系统结构与功能特点,构建由电机Agent、液压制动Agent和ABS Agent组成的多Agent控制系统,通过Agent间的感知、协作来完成防抱死控制,提高电液复合制动系统效能,实现电液复合制动的自适应防抱死控制。
1 车辆建模
1.1 车辆制动数学模型
本文以前轮驱动的纯电动汽车为研究对象,分析其纵向制动过程,不考虑侧向运动、悬架变化和滚动阻力矩的影响,图1为车辆制动受力示意图[10]。
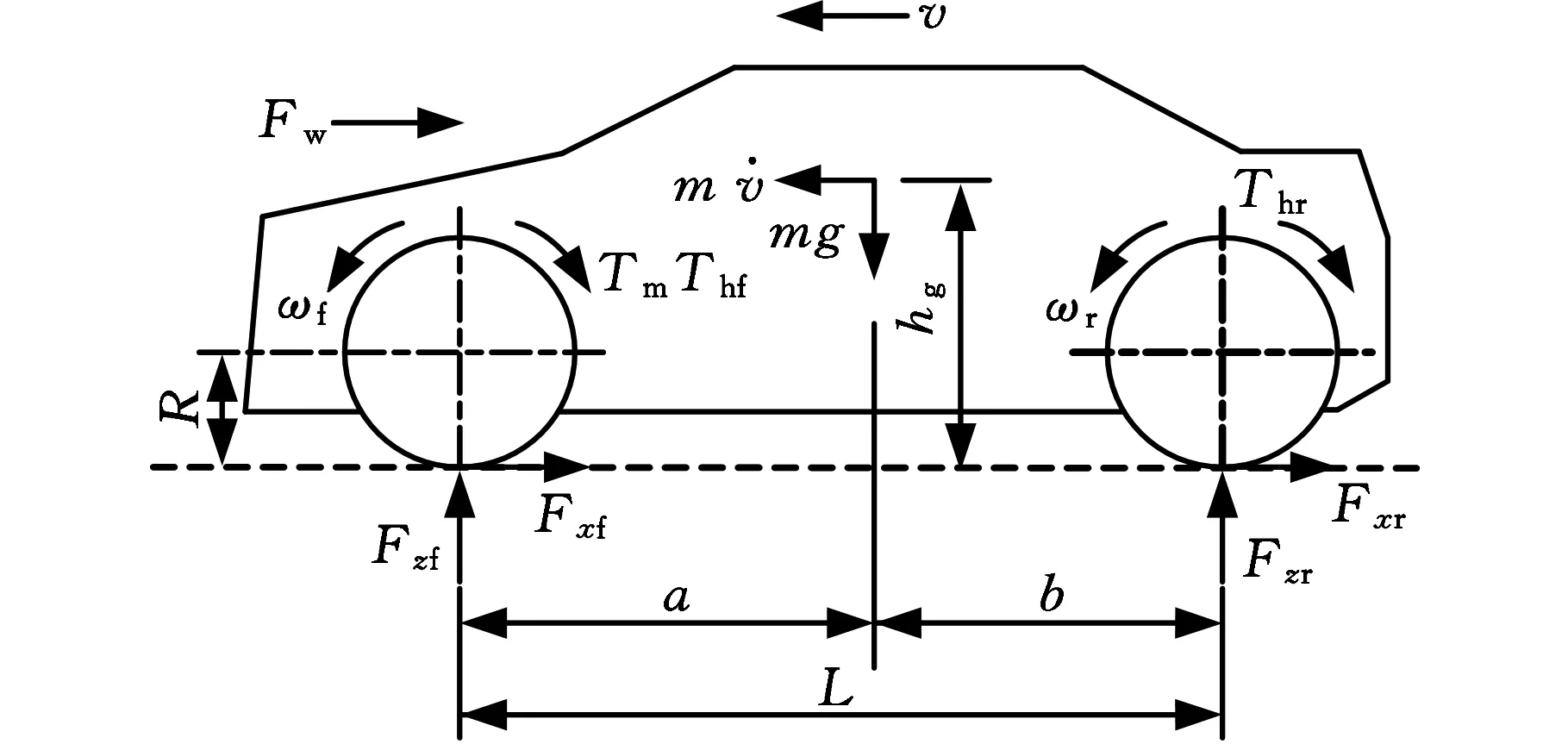
图1 车辆制动受力示意图Fig.1 Schematic diagram of braking force of vehicle
分析可得如下动力学方程:
(1)
(2)
(3)
(4)
(5)
(6)
Fx=Fxf+Fxr=φ(s)(Fzf+Fzr)
(7)
(8)
(9)
(10)
式中,m为车辆质量;v为车辆行驶速度,km/h;Fx为总地面制动力;Fw为空气阻力,N;CD为空气阻力系数;A为迎风面积,m2;J为车轮转动惯量;ωf、ωr分别为前后轮角速度;Fxf、Fxr分别为前后轮地面制动力;R为车轮滚动半径;Tmb为电机在车轮处产生的再生制动力矩;Thf、Thr分别为前后轮液压制动力矩;Fzf、Fzr分别为地面对前后轮的法向反作用力;g为重力加速度;a、b分别为车辆质心至前后轴的距离;hg为车辆质心高度;L为车辆轴距;φ(s)为路面附着系数;s为轮胎滑移率;v0为初始车速;ω0为初始轮速;t为时间。
由式(7)可知,车辆在制动过程中,前后轮地面制动力由轮胎与地面间的附着情况决定,路面附着系数的大小还与路面状况、轮胎相关结构参数有关。轮胎与地面间的附着关系可以由相应的轮胎模型公式来描述,运用较多的主要有理论模型和半经验模型,理论模型相对复杂,且在高精度计算时难以保证准确性,半经验模型是在理论模型基础上通过满足一定边界条件建立的模型,基于大量的试验数据,仿真结果与试验测试结果比较接近,更准确可靠,这里采用荷兰Delft工业大学PACEJKA提出的魔术公式来表示轮胎模型[11],只考虑轮胎纵向运动,可得
φ(s)=Dsin{Carctan[Bs-G(Bs-arctanBs)]}
(11)
式中,D为峰值因子;C为曲线形状因子;B为刚度因子;G为曲线曲率因子。
[12],路面峰值附着系数φp= 0.8的高附着系数路面、φp=0.6的中附着系数路面和φp=0.2的低附着系数路面的轮胎特性参数见表1,由表中数据可以得到不同附着系数路面的φ-s曲线,如图2所示。

表1 不同附着系数路面下轮胎特性参数
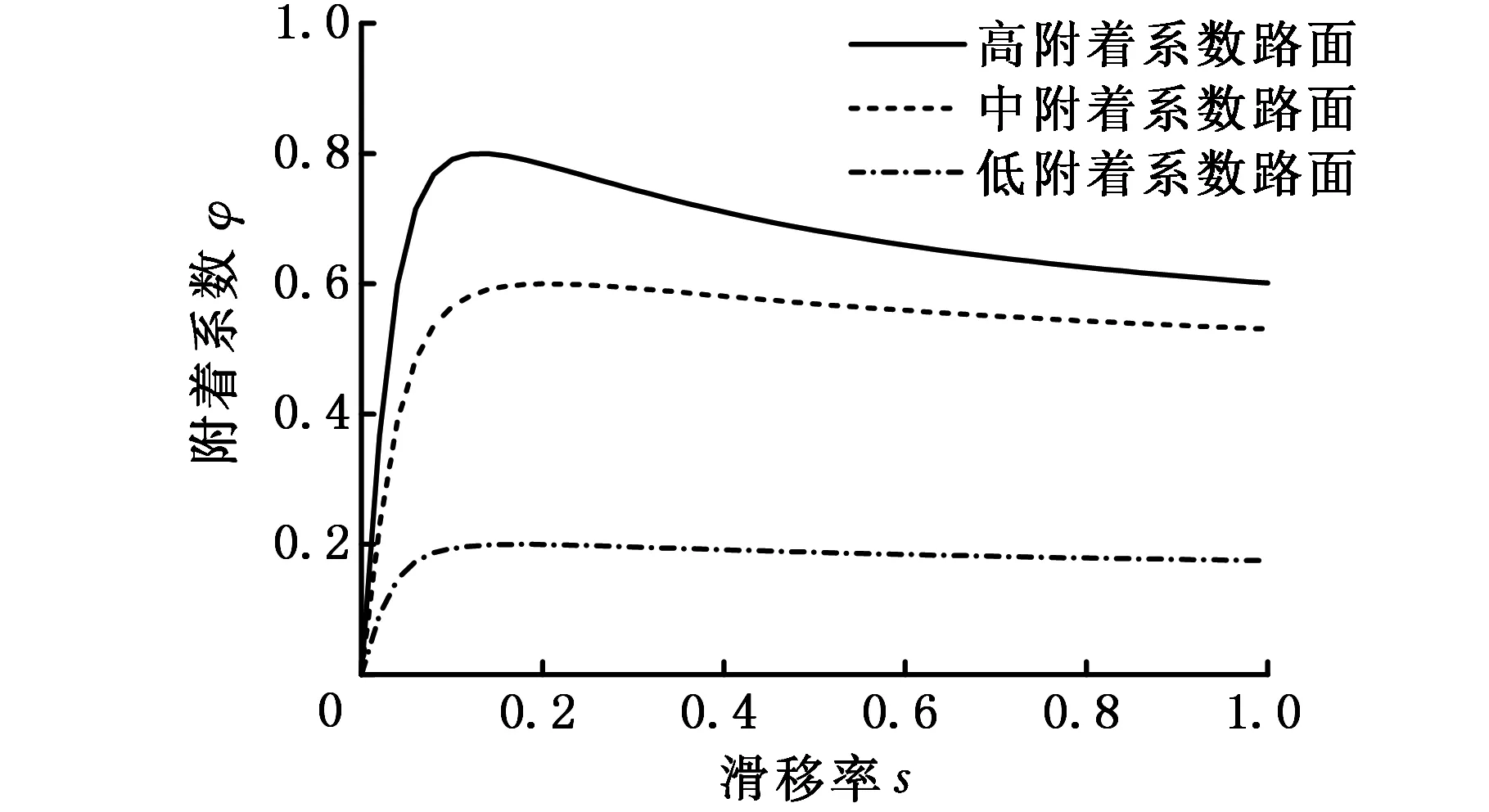
图2 不同路面的φ -s曲线Fig.2 φ -s curves of different pavements
在不同附着系数的路面下,当滑移率s在0.15~0.25范围内时,轮胎与路面间的附着系数最大,制动效果好,实际控制时也应将轮胎滑移率控制在此区间内,这里可取最佳滑移率so= 0.2,车辆防抱死制动时将以此作为目标滑移率。
1.2 电机数学模型
纯电动汽车的驱动电机为永磁无刷直流电机(brushless DC motor, BLDCM),具有驱动和再生制动两种模式,当电机处于再生制动状态时,可得到制动回路的电压、电流方程和电机制动力方程[13]:
(12)
ib=[E-(1-2α)Ub]/Rm
(13)
Tm=ktib
(14)
式中,Ub为蓄电池端电压;E为电机反电动势;Rm为电机回路内阻;ib为电机制动电流;L为电枢回路电感;α为占空比;Tm为电机轴端产生的再生制动转矩;kt为电机转矩常数。
在紧急制动状态下,可以通过调节电机占空比来调节再生制动转矩,从而达到电机制动防抱死控制的目的。
1.3 液压制动器数学模型
纯电动汽车的液压制动系统包括制动主缸、制动轮缸和液压回路,通过电磁阀通/断来改变轮缸压力,从而达到改变制动力的目的。制动过程中,液压制动系统的输入为轮缸目标压力,输出为轮缸实际压力,将液压控制单元响应与液压回路传输滞后等效为一个一阶惯性环节[14],制动系统模型如图3所示。其中,Ci为液压系统电磁阀控制信号,Ci< 0表示减压,Ci= 0表示维持压力不变,Ci> 0表示增压;TB为惯性环节时间常数;K为惯性环节增益;Kp为制动器制动因子。

图3 液压制动系统示意图Fig.3 Schematic diagram of hydraulic braking system
2 基于Agent的电液复合制动系统
2.1 系统模型结构
Agent作为人工智能和计算机领域的一个重要概念,是指能够借助传感器感知外界环境,且经过自身推理决策并利用执行器作用于外界环境的一类实体,单个Agent具有自治行为,同时具备与其他Agent交互协同的能力。由多个Agent组成的多Agent系统(multi-Agent system, MAS)为解决复杂控制问题提供了新的途径,Agent间的交流、协作机制提高了控制系统的鲁棒性与可靠性[15],Agent间交互原理如图4所示。

图4 Agent间交互示意图Fig.4 Schematic diagram of interaction between Agents
纯电动汽车电液复合制动系统是一个复杂的机电液一体化控制系统,电机制动力和液压制动力间的耦合使得控制呈现明显的非线性特性,因此可将多Agent控制技术引入纯电动汽车的防抱死控制中。本文依据Agent理论将复合制动系统从控制原理和功能方面划分成电机Agent、液压制动Agent和ABS Agent,建立基于Agent的电液复合制动防抱死控制系统。
2.1.1 电机Agent
电机Agent接收来自蓄电池模块、ABS Ag-ent和液压制动Agent的控制信号,其结构如图5所示。电机Agent首先依据蓄电池荷电状态(SOC)值SSOC判定能否利用电机进行制动,若不满足电机制动条件,则前后轮均为液压制动;若满足,则根据来自ABS Agent的制动力调节目标信号ΔTm以调整电机再生制动力,输出实际制动力Tmb。最后与来自液压制动Agent的前轮液压制动力Thf共同作用于前轮,调整前轮制动力以改变前轮滑移率sf。
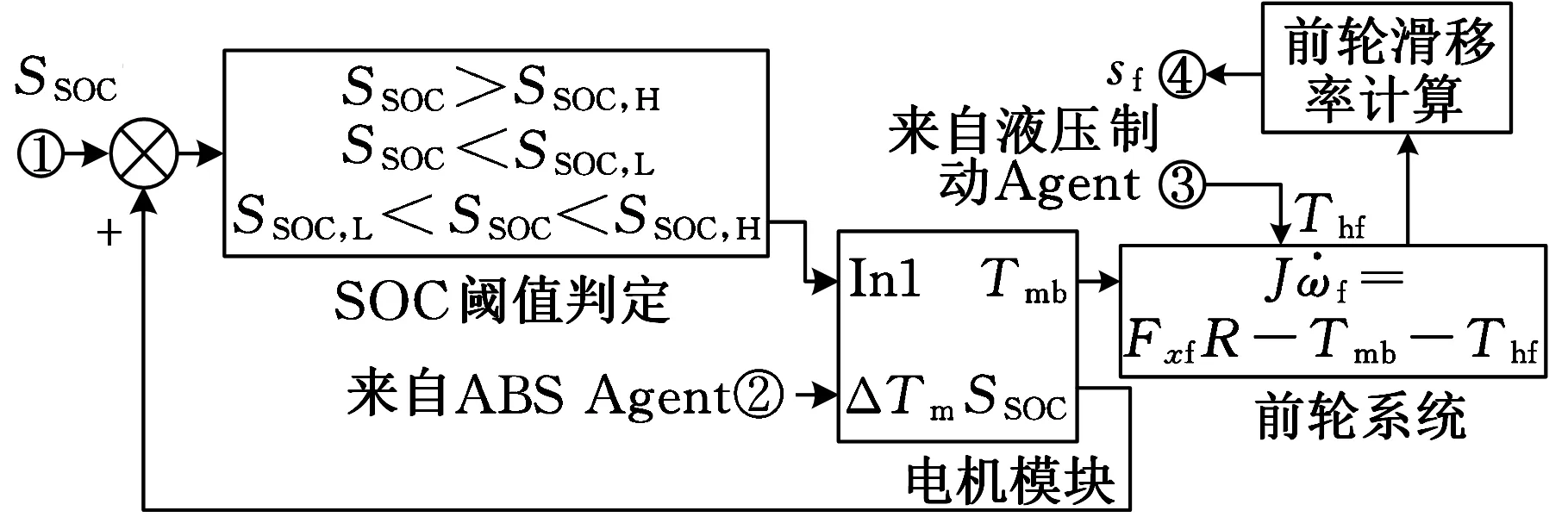
图5 电机Agent示意图Fig.5 Schematic diagram of motor Agent
2.1.2 液压制动Agent
液压制动Agent接收来自电磁阀、ABS Ag-ent和电机Agent的控制信号,其结构如图6所示。电磁阀控制信号Ci和ABSAgent控制信号ΔTh分别决定液压制动器何时增减压及增减压量,依据前后轮制动力分配算法输出前后轮所应施加的液压制动力。最后与来自电机Agent的制动力Tmb共同作用,改变前后轮滑移率sf、sr,达到防抱死制动的目的。
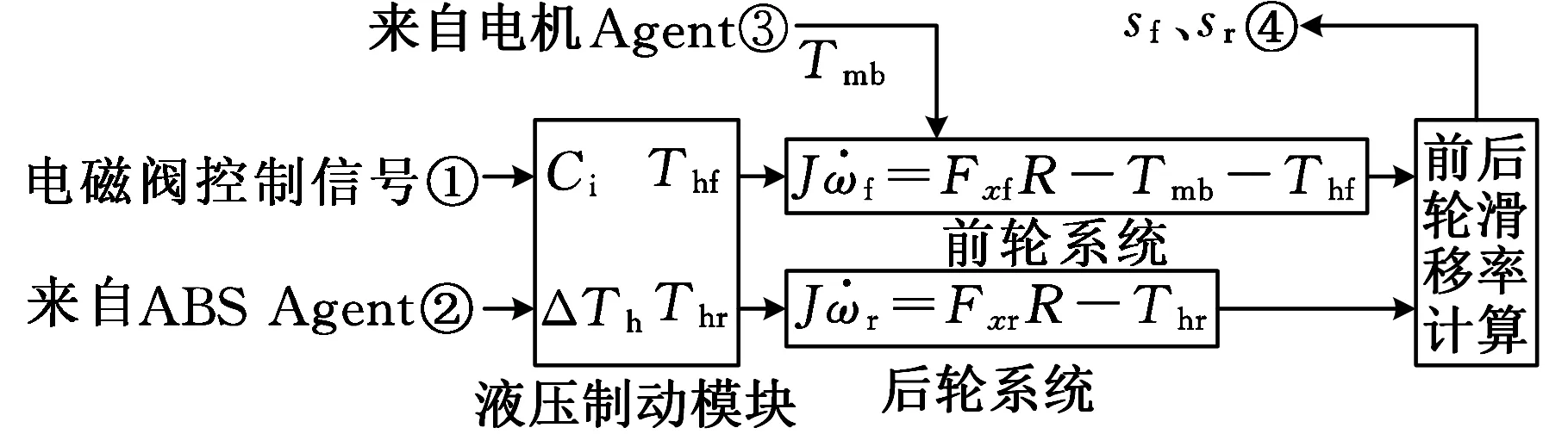
图6 液压制动Agent示意图Fig.6 Schematic diagram of hydraulic braking Agent
2.1.3ABSAgent
在制动系统中,ABS Agent的作用是防止车轮抱死从而保证车辆在不同附着系数的路面上安全行驶。ABS Agent的结构如图7所示,通过感知前后轮滑移率sf、sr并输出电机和液压制动力调整量ΔTm、ΔTh以达到控制前后轮滑移率、防抱死的目的。此外,ABSAgent还根据路面附着识别结果信号φ(s)来分配电机与液压制动力,使车辆能够在不同附着系数路面上获得合理的制动力,提高系统的自适应能力。
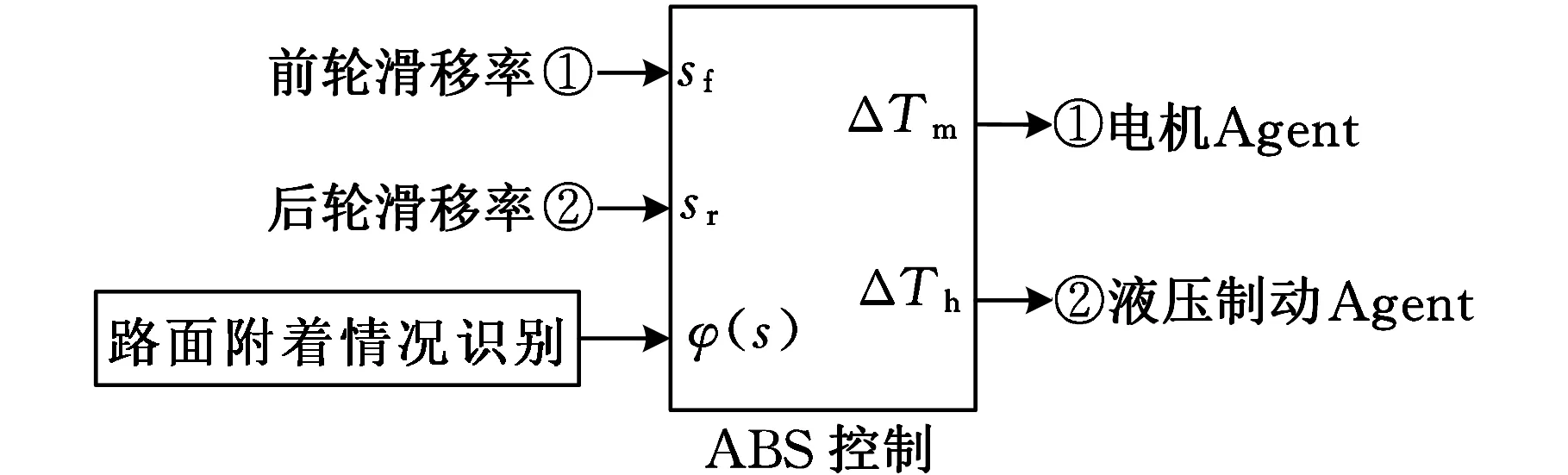
图7 ABS Agent示意图Fig.7 Schematic diagram of ABS Agent
2.2 Agent间策略
要使复合制动系统获得良好的防抱死制动效果,需要Agent间相互协调、相互协作,根据纯电动汽车防抱死制动要求,以让步策略、竞争策略和协同策略来说明制动时Agent的协作方式。
2.2.1 让步策略
当路面附着状况、制动强度(紧急制动时)等参数的改变使前后轮滑移率偏离最佳滑移率so时,ABSAgent能够感知滑移率与路面附着系数的变化,此时电机与液压制动力的控制都必须从驾驶员移交至ABSAgent,即由常规制动状态转为防抱死制动状态。ABSAgent和电机Agent、液压制动Agent交互,不断调整前后轮制动力使车轮滑移率保持在最佳滑移率附近,远离车轮抱死的“危险区域”。
2.2.2 竞争策略
在单一附着路面上的紧急制动状态下,电机制动力与液压制动力都能够达到防抱死制动的目的,依据电机制动力响应比液压制动系统快这一特点,电机总是先于液压系统建立初始制动力,即电机Agent与液压制动Agent间具有竞争关系。首先调节电机制动力,由电机制动力补偿液压制动力的落后响应时间,使前轮先于后轮进入抱死趋势,保证制动稳定性。
2.2.3 协同策略
当车辆进入紧急制动状态,同时路面附着状况突变时,系统将依据不同附着路面协调电机制动力与液压制动力的分配,同时Agent间通过协商优先调整前轮电机制动力。高附着系数路面电机建立初始制动力后撤出以保证制动安全性;中附着系数路面同时调整电机与液压制动力,若调整电机制动力仍不能满足防抱死制动要求则继续减小液压制动力;低附着系数路面撤出液压制动力,只利用电机制动力以保证能量回收率,电机与液压制动力分配见表2。

表2 不同附着系数路面下电机与液压制动力分配
2.3 路面附着情况识别方法
根据汽车理论,定义地面制动力Fx与垂直载荷Fz之比为制动力系数φb,在车轮处于边滚边滑的稳定滑移状态(即滑移率s∈[0.15, 0.25])时,轮胎能够有效利用路面的最大附着条件,制动力系数达到最大值,此时制动力系数等于路面的峰值附着系数φp。针对前驱纯电动汽车,依据制动时电机Agent对液压制动力补偿使前轮更快进入抱死趋势这一特点,选择前轮状态参数进行路面附着情况识别,由图1可得
(15)
当前,纯电动汽车都具有完备的传感器系统,电机制动力矩Tmb、液压制动力矩Thf和前轮角速度ωf都实时可测,通过式(15)可以估算当前路面附着系数,作为ABSAgent制动力分配的依据。
3 仿真分析
为验证基于Agent的防抱死控制方法及Ag-ent间协作策略的正确性,在MATLAB/Simulink中建立仿真模型(图8)。分别进行单一附着路面和对接路面仿真实验。
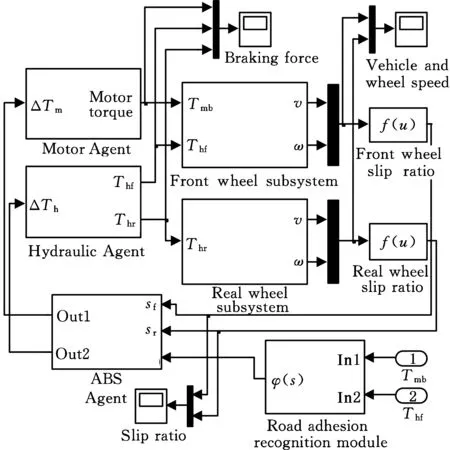
图8 复合制动系统仿真模型Fig.8 Simulation model of composite braking system
3.1 单一附着路面仿真
车辆以v0=20m/s的初始速度进入防抱死制动状态,图9和图10分别为高附着系数路面和低附着系数路面下的仿真结果。

(a)车速、轮速变化
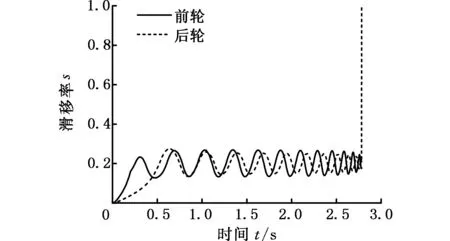
(b) 前后轮滑移率
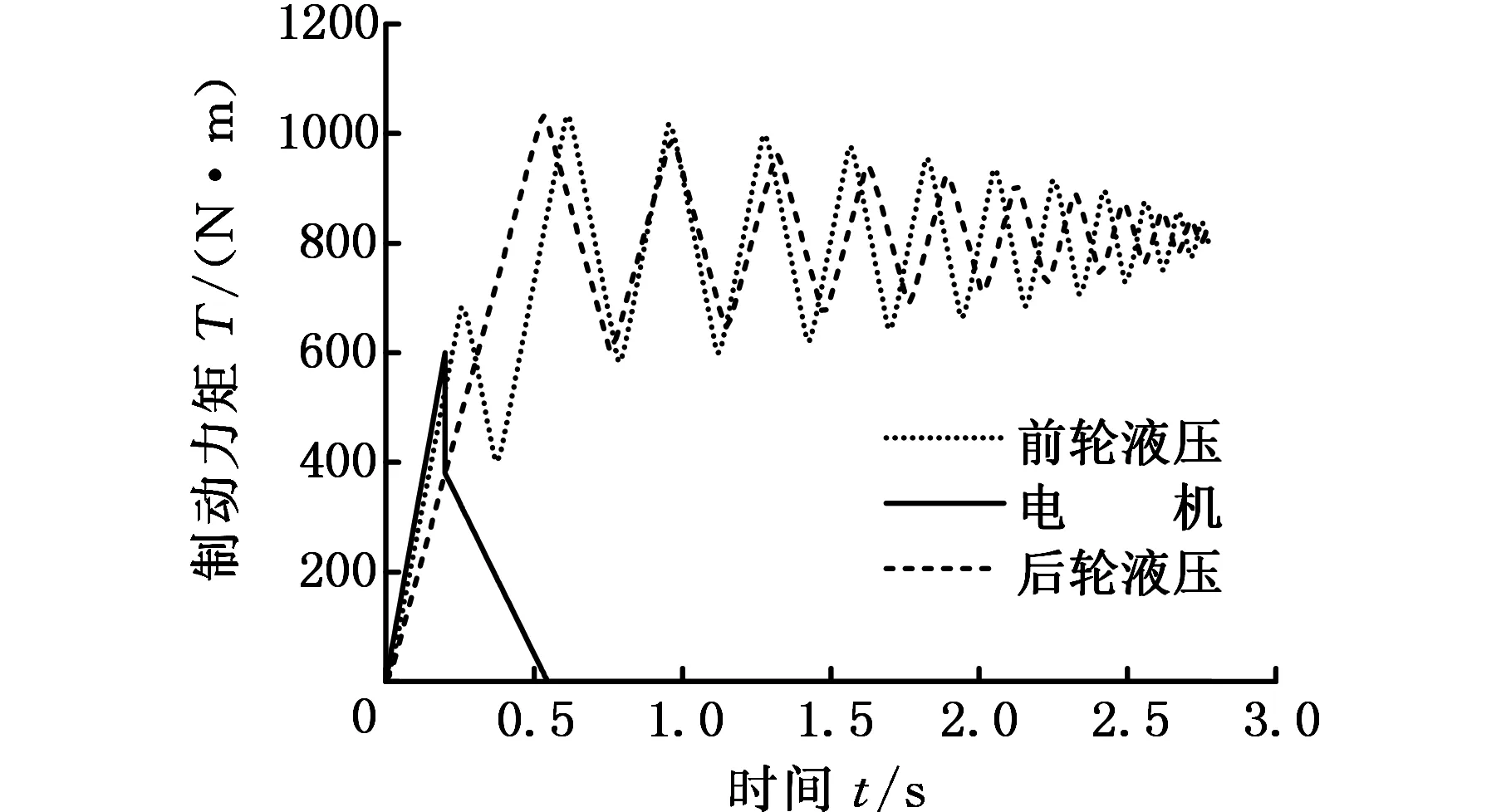
(c)前后轮制动力矩图9 高附着系数路面仿真结果Fig.9 Simulation results of high adhesion surfaces
(a)车速、轮速变化
(b) 前后轮滑移率
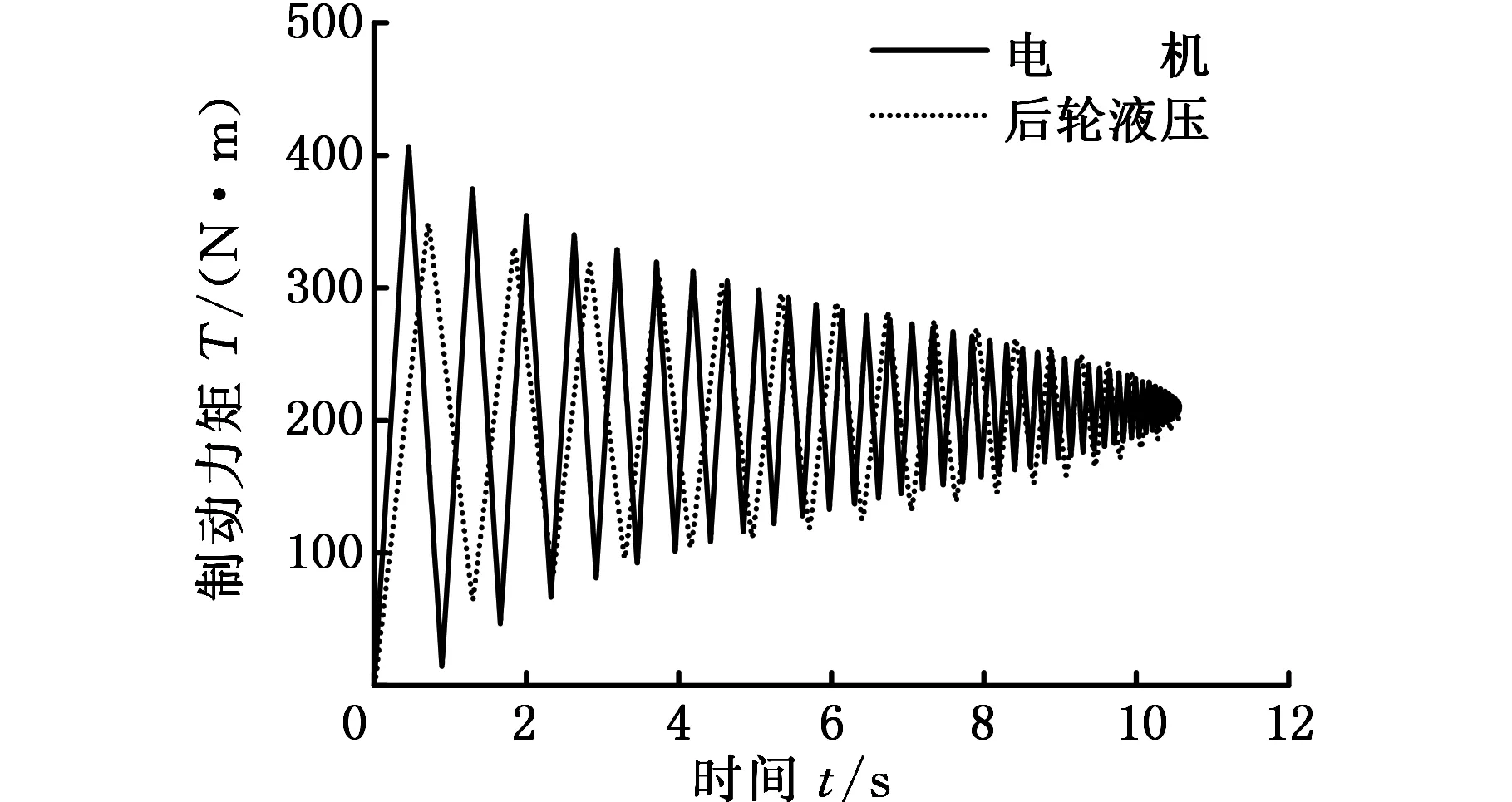
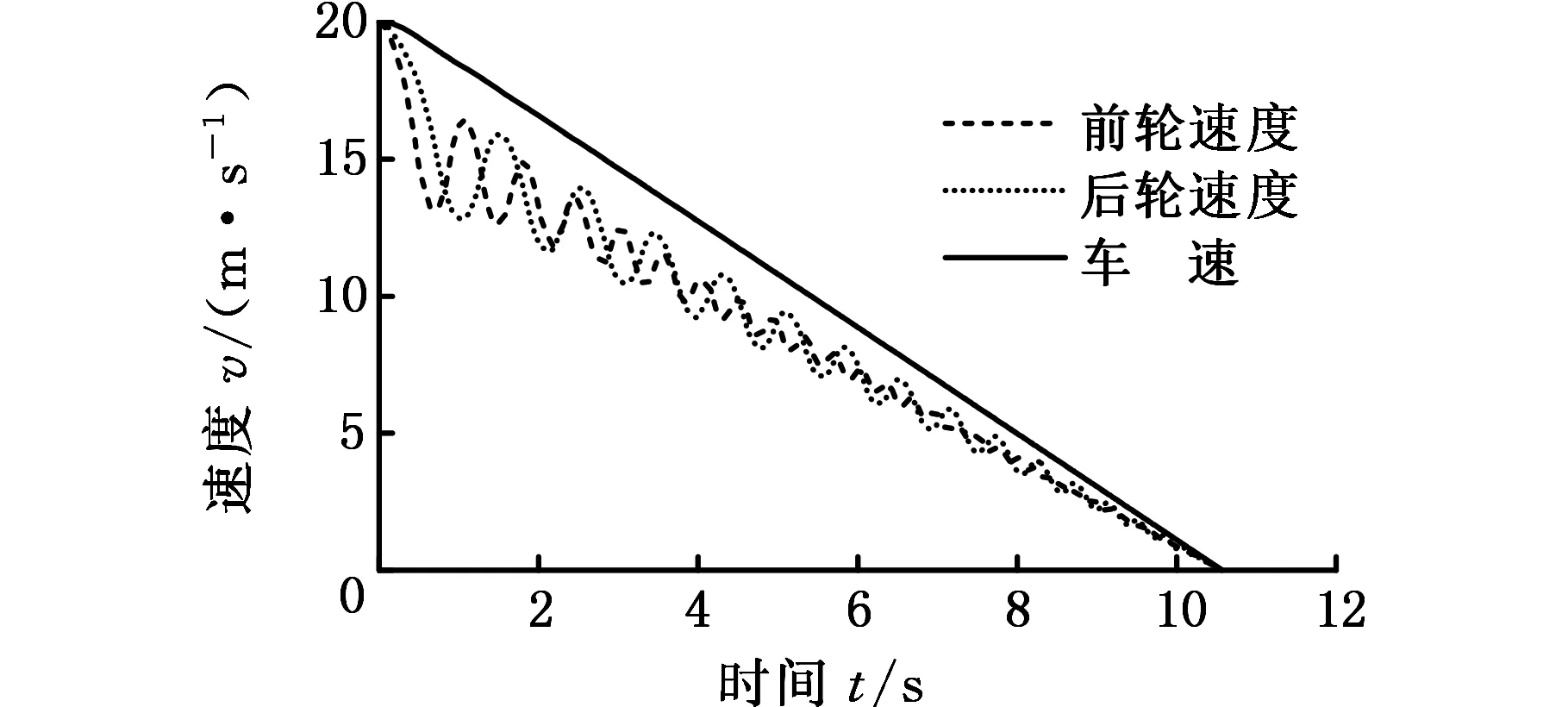
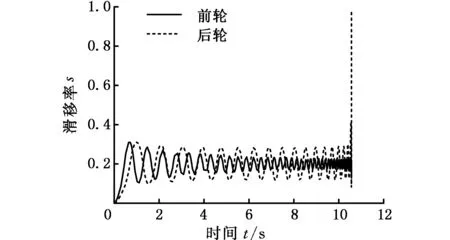
(c)前后轮制动力矩图10 低附着系数路面仿真结果Fig.10 Simulation results of low adhesion surfaces
由图9a可知,车辆制动时间约为2.7s,高附着系数路面下前轮轮速比后轮轮速下降得更快,表明在Agent的协作下,前轮能够先于后轮进入抱死趋势,保证制动的稳定性。图9b滑移率的变化也表明前轮能够先于后轮进入抱死趋势,并且在0.3s左右就维持在最佳滑移率附近,响应迅速,后轮大约在0.71s后维持在最佳滑移率附近。图9c反映了前后轮制动力矩的变化情况,可以看出,电机制动力响应迅速,能够补偿前轮液压制动力,在0.3s左右开始电机制动力和前轮液压制动力都开始减小,这是由于前轮滑移率增大并偏离最佳滑移率进入抱死状态,ABSAgent调整制动力以保证前轮滑移率维持在最佳滑移率附近,之后只通过调整前后轮液压制动力来完成制动过程,控制效果良好。
图10反映了低附着系数路面的制动情况,制动时间约10.5s。由图10a、图10b可知,低附着系数路面上前轮也能够先于后轮进入抱死趋势,前轮在0.8s左右稳定在最佳滑移率附近,后轮滑移率在1.3s左右稳定,Agent间能有效协作,制动效果良好。图10c表明,低附着系数路面下,依据控制策略制动系统关闭前轮液压制动功能,前轮仅有电机制动力且制动力响应迅速。
3.2 对接路面仿真
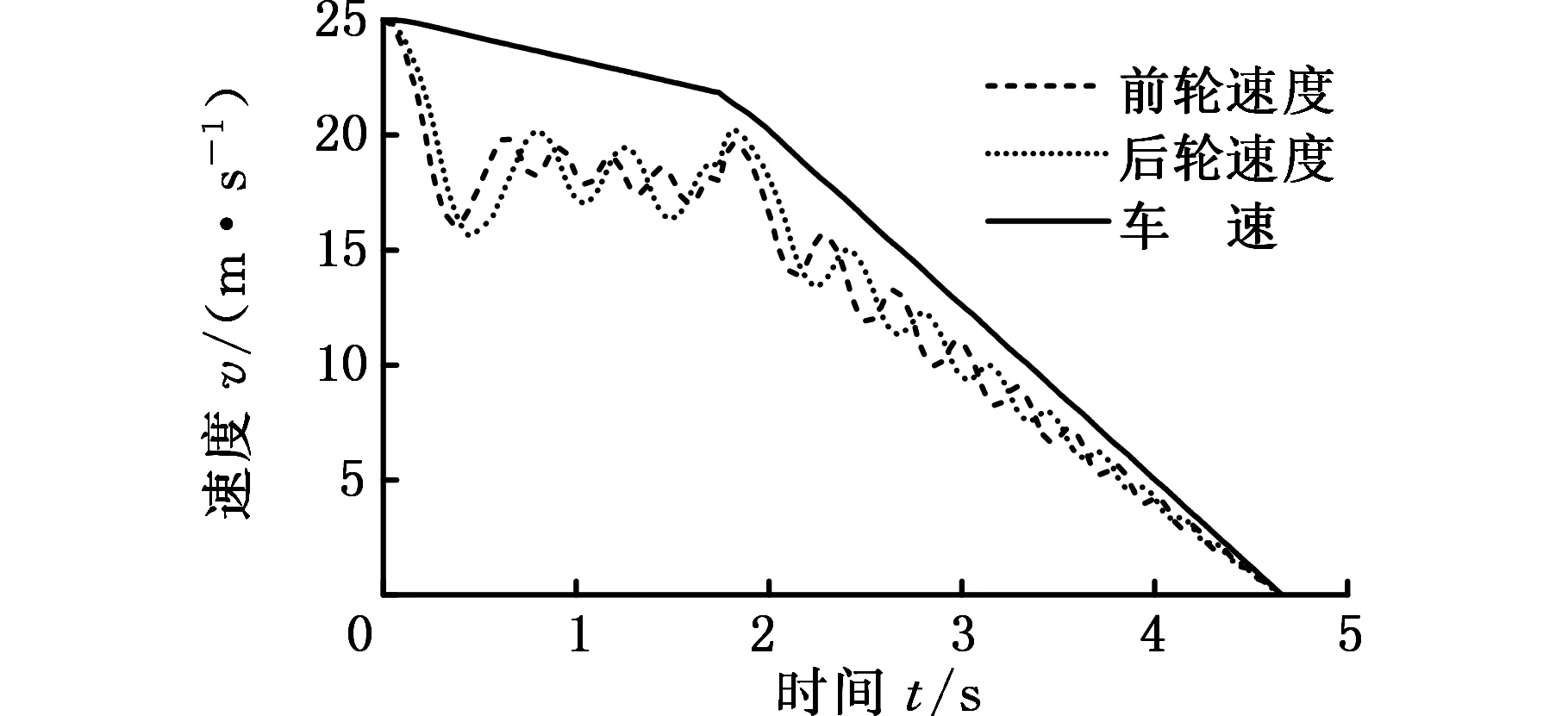
车辆以v0=25m/s的初始速度经过附着系数突变的路面,分别以高附着系数路面(φ=0.8)向低附着系数路面(φ=0.2)过渡和低附着系数路面向高附着系数路面过渡为例,验证制动系统在对接路面上的制动效果。
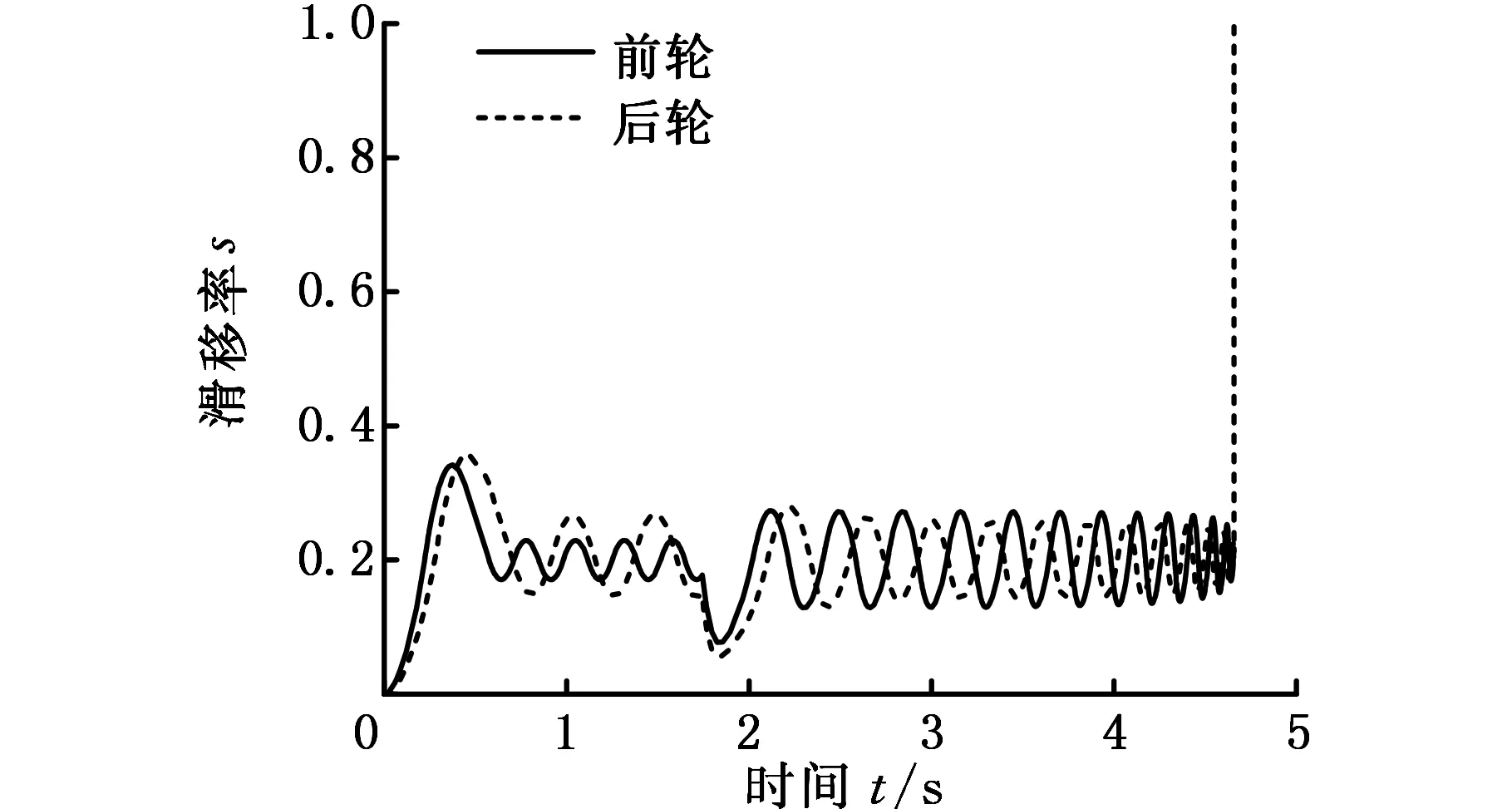
由图11和图12可知,两种对接路面情况下前轮都能够先于后轮进入抱死趋势,表明在Agent的协作下,制动系统能够保证制动稳定性。图11c表明在高附着系数路面上,由电机产生初始制动力补偿制动力,之后逐渐减小,大约在2.5s,路面附着系数由0.8突变至0.2,前轮液压制动力迅速撤出,电机制动力迅速产生并与后轮液压制动力共同作用,说明ABSAgent准确感知路面附着情况变化并协调电机Agent和液压制动Agent调整前后轮制动力。图12c中,车辆由低附着系数路面驶向高附着系数路面,在1.8s左右,ABSAgent感知路面附着情况变化,前轮液压制动力逐渐增大,电机制动力在液压制动力增至一定值后迅速撤出,此时车辆由前后轮液压制动力完成防抱死制动。

(a)车速、轮速变化

(b) 前后轮滑移率
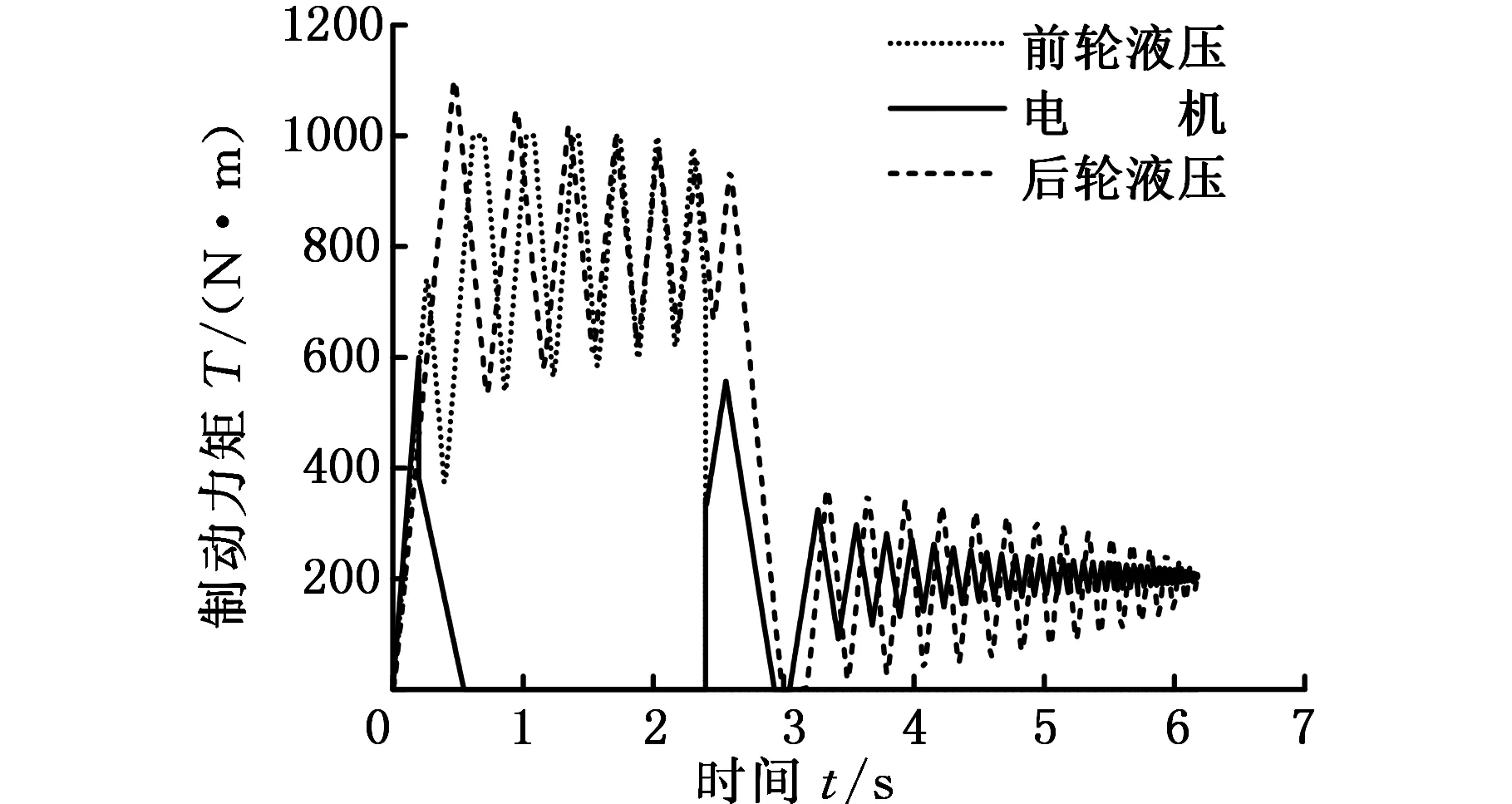
(c)前后轮制动力矩图11 高附着系数至低附着系数对接路面仿真结果Fig.11 Simulation results of high to low adhesion surfaces
(a)车速、轮速变化
(b)前后轮滑移率

(c)前后轮制动力矩图12 低附着系数至高附着系数对接路面仿真结果Fig.12 Simulation results of low to high adhesion surfaces
4 结论
(1)提出了一种基于Agent的电液复合制动防抱死控制方法,在分析车辆制动模型的基础上,构建了由电机Agent、液压制动Agent和ABSAgent等组成的复合制动系统。
(2)提出了Agent间协作策略,依据单Agent的自治和多Agent间的协作保证前轮始终先于后轮进入抱死趋势,准确识别路面附着情况变化并根据不同路面合理协调前后轴电机与液压制动力分配。
(3)MATLAB/Simulink仿真结果表明,所提基于Agent的电液复合制动防抱死控制方法和Agent间策略可行,提高了制动过程的稳定性和系统的自适应性。
参考文献:
[1] 彭晓燕, 吕以滨, 何磊. 基于滑移率的线控制动系统制动力分配策略研究[J]. 中国机械工程, 2016, 27(17): 2407-2412.PENGXiaoyan,LYUYibin,HELei.ResearchonBraking-forceDistributionStrategiesforBraking-by-wireSystemBasedonSlipRatio[J].ChinaMechanicalEngineering, 2016, 27(17): 2407-2412.
[2]XUG,XUK,ZHENGC,etal.FullyElectrifiedRegenerativeBrakingControlforDeepEnergyRecoveryandSafetyMaintainingofElectricVehicles[J].IEEETransactionsonVehicularTechnology, 2016, 65(3): 1186-1198.
[3] 杨亚娟, 赵韩, 李维汉, 等. 电动汽车再生制动与液压ABS系统集成控制研究[J]. 合肥工业大学学报(自然科学版), 2012, 35(8): 1054-1058.YANGYajuan,ZHAOHan,LIWeihan,etal.IntegratedControlofRegenerativeBrakingandHydraulicAnti-lockBrakingSystemofElectricVehicle[J].JournalofHefeiUniversityofTechnology(NaturalScience), 2012, 35(8): 1054-1058.
[4]YING,JINXJ.CooperativeControlofRegenerativeBrakingandAnti-lockBrakingforaHybridElectricVehicle[J].MathematicalProblemsinEngineering, 2013(4): 1-9.
[5] 吴普兴, 滕青芳. 混合动力电动汽车再生制动能量回收的研究[J]. 机械传动, 2014, 38(3): 58-66.WUPuxing,TENGQingfang.ResearchofRegenerativeBrakingEnergyRecoveryofHybridElectricVehicle[J].JournalofMechanicalTransmission, 2014, 38(3): 58-66.
[6]ITANIK,BERNARDINISAD,KHATIRZ,etal.ComparisonbetweenTwoBrakingControlMethodsIntegratingEnergyRecoveryforaTwo-wheelFrontDrivenElectricVehicle[J].EnergyConversionandManagement,2016,122:330-343.
[7] 戴彦. 汽车ABS滑移率的模糊滑模控制研究[J]. 机械设计与制造, 2015(6):80-82.DAIYan.StudyonFuzzySlidingModeControlofAnti-skid-brakeSystemBasedonSlipRatio[J].MachineryDesignandManufacture,2015(6):80-82.
[8] 严运兵, 吴浩, 赵慧. 汽车防抱死制动系统的H∞鲁棒控制[J]. 汽车工程,2014,36(4):453-458.YANYunbing,WUHao,ZHAOHui.H∞RobustControlofVehicleAnti-lockBrakingSystem[J].AutomotiveEngineering,2014,36(4):453-458.
[9]MIRZAEIM,MIRZAEINEJADH.OptimalDesignofaNon-linearControllerforAnti-lockBrakingSystem[J].TransportationResearchPartCEmergingTechnologies,2012,24(9):19-35.
[10] 余志生. 汽车理论[M]. 5版. 北京: 机械工业出版社,2011:108-110.YUZhisheng.TheoryofAutomobile[M]. 5thed.Beijing:ChinaMachinePress,2011:108-110.
[11] 崔胜民. 汽车系统动力学与仿真[M]. 北京: 北京大学出版社,2014:13-17.CUIShengmin.VehicleSystemDynamicsandSimulation[M].Beijing:PekingUniversityPress,2014:13-17.
[12]LIK,CAOJ,YUF.NonlinearTire-roadFrictionControlBasedonTireModelParameterIdentification[J].InternationalJournalofAutomotiveTechnology,2012,13(7):1077-1088.
[13] 陈庆樟, 李其军, 侯付来, 等. 电动汽车电机再生制动防抱死控制研究[J]. 机械设计与制造,2016(6):147-150.CHENQingzhang,LIQijun,HOUFulai,etal.AResearchontheRegenerativeAnti-lockBrakingControlofMotorinElectricVehicle[J].MachineryDesignandManufacture,2016(6):147-150.
[14] 张雷, 于良耀, 宋健, 等. 电动汽车再生制动与液压制动防抱协调控制[J]. 清华大学学报(自然科学版),2016,56(2):152-159.ZHANGLei,YULiangyao,SONGJian,etal.CoordinatedAnti-lockBrakingControlofRegenerativeandHydraulicBrakingSystemsinElectricVehicles[J].JournalofTsinghuaUniversity(ScienceandTechnology),2016,56(2):152-159.
[15] 李士勇, 张云, 栾秀春. 多Agent倒立摆模糊控制系统[J]. 哈尔滨工业大学学报,2005,37(12):1628-1630.LIShiyong,ZHANGYun,LUANXiuchun.Multi-Agent-basedFuzzyControlSystemforanInvertedPendulum[J].JournalofHarbinInstituteofTechnology,2005,37(12):1628-1630.
(编辑 袁兴玲)
Research on Anti-lock Control of Electro-hydraulic Braking Systems Based on Agents
NIU Limin ZHOU Yazhou YANG Hongyuan
School of Mechanical Engineering, Anhui University of Technology,Ma’anshan,Anhui,243002
For the dynamic response characteristics differences between the motor regenerative braking forces and the hydraulic braking forces and the nonlinear characteristics of the electro-hydraulic braking systems of a battery electric vehicle, an anti-lock braking method was proposed based on Agents for electro-hydraulic braking systems. The motor regenerative braking forces and hydraulic braking forces were distributed according to unilateral concession strategy, competition strategy and cooperative strategy of the Agent based braking systems which was composed of motor Agent, hydraulic braking Agent and ABS Agent. MATLAB/Simulink simulation results show that the front wheel is always ahead of the rear wheel into the lock trends by cooperation among Agents under emergency braking conditions, besides, the Agent based braking system may identify road adhesion accurately to distribute the motor regenerative braking forces and the hydraulic braking forces, braking stability and adaptive ability of the braking systems are promoted.
electric vehicle; electronic-hydraulic braking; Agent; anti-lock; coordinated control
2016-10-30
国家自然科学基金资助项目(51275002);江苏省道路载运工具新技术应用重点实验室开放基金资助项目(BM-20082061502);安徽工业大学研究生创新研究基金资助项目(2015037)
U469.72
10.3969/j.issn.1004-132X.2017.13.009
牛礼民,男,1976年生。安徽工业大学机械工程学院副教授。主要研究方向为电动汽车控制技术、新能源汽车技术。发表论文近10篇。E-mail:niulmdd@163.com。周亚洲,男,1992年生。安徽工业大学机械工程学院硕士研究生。杨洪源,男,1991年生。安徽工业大学机械工程学院硕士研究生。
