飞机着陆模块设计与故障检测
2017-07-19杜玉立于宝成钱平
杜玉立++于宝成++钱平


摘 要:本章主要论述了飞机在着陆过程中的模块设计与故障检测,阐述了着陆模块的结构及功能,给出了该模块的硬件设计方案,从着陆系统故障诊断功能和性能要求出发,集成了信号模拟电路、DSP最小电路系统、信号调理电路及USB串口通信电路为一体的故障诊断模块。软件开发采用C语言和Labview混合编程方式集成在CCS环境下,利用可视化的开发软件实现了人机交互,动态的实现了在该软件下通过控制电路的断开与闭合完成检测软件的开发。上位机有机地结合了模糊诊断技术采用可视化编程软件Labview做为开发工具,结合故障诊断模块的设计,通过专家系统知识与推理程序相独立的结构,结合预期给定和推理的电压电流值进行对比来判定检测结果是否正确。测试结果表明,本文设计的飞机着陆模块故障诊断系统达到了预期目标,并可以向多机型的故障诊断系统进行专家知识库的扩充与完善,对今后系统故障诊断的研究具有一定的参考价值。
关键词:飞机着陆模块;故障诊断;USB串口通讯;Labview
本课题研究对象是某机型的着陆模块系统故障诊断技术。其目的是为了保证飞机着陆过程中各项指标数据正常,在起飞之前须对着陆模块系统的数据指标进行测试,与预期的性能指标进行对比分析,对潜在的着陆模块系统故障做出预测和警报,分析故障原因并提出合理的建议,方便机场维护人员能够及时修理更换故障单元来维持飞机着陆模块系统正常工作,从而有效避免不必要的事故。在深入了解飞机着陆模块系统测试技术之后,本课题开展对着陆模块系统故障诊断的研究。首先在外场测试环境下对着陆模块系统进行检测,收集着陆模块测试的电压电流值和其它的性能状态和其数据,然后与预期计算的输出值进行有效对比,对着陆模块系统潜在和正在发生的故障进行诊断分析,最后判断该着陆模块是否正常运行,将分析结果报告给地勤人员,完成该模块故障的检测。提高飞机着陆安全性及对复杂环境的适应能力,该模块的正常工作保证了飞机着陆的安全性和可靠性。通过该课题的研究有助于着陆模块系统在外场测试环境下高效的检测潜在的故障,缩短系统维护周期和单元间的调试,对飞机着陆模块系统的研究具有重要的理论和实际意义。
1 着陆模块总体结构设计
飞机着陆模块总体结构如图1.1所示,图中虚线部分主要由检测模块和通信模块构成。检测模块完成对着陆系统的检测功能,通过串口通讯与上位机模块进行通讯,检测模块对返回的数据进行故障诊断分析,完成故障诊断。
在本系统中上位机开发了基于Labview人机交互软件,输入检测指令由该软件分析和译码得到新的可通过USB接口的检测数据,该数据由CPU最小系统控制分配给对应的模拟电路,最后通过调理电路的模拟得到测试电路的数据。另外就是模拟着陆模块控制器与PC计算机之间的通讯,通过计算机BIT命令和控制器所检测到的故障代码之间的数据交换,该通信支持RS422总线通信,而本系统中上位机是通用PC机,需要通过RS422/R5232转换器来实现模拟BIT命令与控制器之间的通信。检测接口部分主要由辅助电路和高精度继电器组成,
飞机上所有开关都只有接通或者断开两种状态,该系统利用高精度继电器的通断来模拟这些开关的状态来模拟着陆模块系统相关各电路状态开关的切换。
2 硬件设计
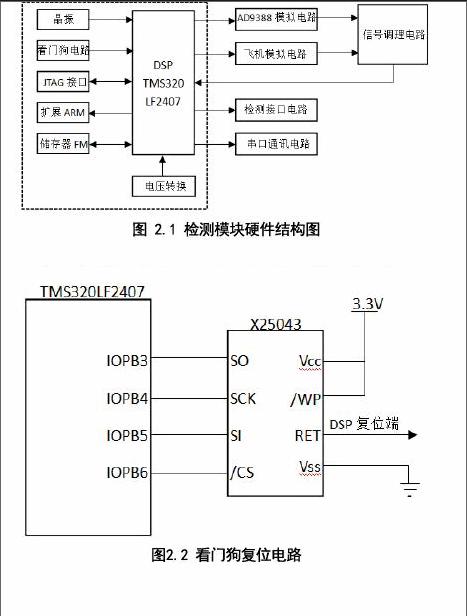
硬件結构图如图2.1所示,外围电路包含有AD9388模拟电路、飞机模拟电路、信号调理电路、检测接口电路和串口通信接口电路,是以CPU(TMS320LF2407)为核心的最小电路,如图2.1中虚线所示。
中央处理模块主要包括CPU、RAM(63Lv1024)、铁电存储器(M25L256)、实时时钟电路、看门狗复位电路和电源电压转换电路,是检测系统的核心。微处理器系统设计的复杂程度主要取决于外设的扩展方式。DSP对外设空间的寻址以及对数据的读写操作,是通过不同类型的指令和对应的PS/DS/IS引脚进行读、写,通过与总线时序的控制配合,来实现I/O两个独立空间地址映像区间的读、写操作。
图 2.1 检测模块硬件结构图
2.1 看门狗复位电路
一般情况下在检测的过程中,电气设备的周围都有电磁噪声,电源频率的改变、谐波干扰等,对该检测装置的可靠性和稳定性都有一定的影响,使得CPU工作电压不稳定,出现跑飞的情况以至于该装置误动作或者无反应。为了减少发生这种情况,在DSP外围加上了硬件看门狗电路同时在DSP芯片内设置了看门狗。看门狗电路采用的是可编程看门狗监控芯片X250431261,它集成了看门狗定时器、电压监控及高速、非易失性存储器EZPROM三种功能[1]。其看门狗定时器可以通过设置内部寄存器进行定时编程,定时周期设置为1450ms、600ms,200ms,保障了CPU的安全运行。一旦程序因为电磁干扰或出现了其它异常,看门狗将强制CPU复位操作。对于断电影响也有一定的安全措施,电压监控器检测VCC电压,当电压降至2.7V以下,就进行复位操作,直到VCC返回稳定电压为止。看门狗复位电路如图2.2所示:
2.2 信号调理
着陆模块运行时开短路所引起阻值变化转换为对应的电压值是(0-10)V的电压信号,而DSP的工作电压为3.3V,各个I/O口上所能接受的稳定电压也是3.3V左右,所以在通过A/D转换后送入控制处理核心DSP之前,着陆模块故障检测电路的设计需要通过信号调理电路对检测的电压进行信号调理。放大器电路由高精度运放器LM124和电阻电路组成,RC滤波器由电阻和电容组成,滤波范围取决于电阻电容值。调理电路中,一级放大器产生一个稳定-5伏电压与输入电压值相叠加,叠加后的电压值经过下一级同相信号放大电路,使得输出的电压信号为(0-3V)。电路末端使用串联电阻限流,使用两个二极管来实现信号限幅,使过滤的电压输出信号控制在(0-3.3V)之间,保护了信号板的安全接收。
2.3 USB通信接口电路
PC机采集到的数据与着陆模块控制器之间的通讯采用USB接口通信,该模块完全遵循USB2.0规范,部分采用USB2.0芯片ISP1581,支持7个动态I/O接口和一个固定控制I/O端点。该芯片支持USB2.0的自检工作模式和USB1.1的返回工作模式,在高速或全速条件下都能正常运行,满足该通讯需求。内部集成有串行接口引擎SIE、PIE、8KB的FIFO存储器、数据收发器、PLL的12MHz晶体振荡器和3.3v的电压调整器[2]。该电路通过高速DMA接口直接与ATA/ATAPI外设相连,同时通过Labview软件控制USB总线的连接,形成数据的交换。DSP和ISP1581的连接均采用8位地址总线和16位数据总线分离的通用处理器模式,方便数据的读、写操作。DSP与ISP的数据交换采用中断方式,以DSP的通用I/O口作为ISP的片选信号。ISP1581的唤醒功能WAKEUP引脚接到DSP的一个通用I/O口上,RPU引脚通过1.5kΩ电阻器上拉后为通用处理模式,RREF引脚通过12.0kΩ精密电阻器接地,BUS_CONF引脚是选择总线模式,也执行上拉操作,MODE0引脚的功能为选择通用处理器模式下的读、写操作。由于该芯片内部集成了复位电路,复位操作只需将RESET引脚直接接高电平即可。
3 故障诊断
3.1 软件诊断设计
主要采用可视化编程软件Labview设计。该软件设计主要起两个作用:一是判断检测系统工作是否正常,对系统进行自检操作;二是在自检通过后,通过高精度的继电器对该电路模块模拟电路状态的开关操作,并采集相应的输出电流电压值;自检操作能发现潜在的电路故障,数据采集能分析具体故障部位,以便在发生系统故障时能迅速的找到并执行相应的排除工作,确保着陆模块能够正常的运行。着陆模块控制器的正常工作电压为27V,由外部进行供电,通过PC上位机与其通讯,上位机通过USB接口与DSP最小系统进行数据交换。检测系统自诊断程序结构如图3.1所示
可视化Labview软件控制面板可执行自检、复位操作,并模拟着陆模块开关状态,如图3.1.1所示
3.2 故障检测测试
主要采用交叉保护的检测原理,即当左、右两侧机轮频率(速度)差值超过标准门限范围(352-720)Hz(约30-60km/h)时,着陆控制器输出控制信号,调节低速机轮迫使两侧机轮频率(速度)不超过门限范围。
电流测量方法:先给左、右机轮施加相同的机轮模拟速度信号V,再将左、右控制器电流I左,I右调至最大电流7.5mA,依次将左、右机轮速度信号降低至(360-720)Hz左右,着陆模块控制器如能正常工作,此时必须输出控制信号,使速度偏高的机轮电流降低至1mA以下。该检测方法采集着陆模块控制器在交叉保护状态下输出的控制电流信号,通过此电流值判断着陆模块工作是否正常,防止飞机在着陆过程中出现的故障问题。
电压回溯检测:先通过着陆模块控制器给左、右机轮施加模拟速度信号20Km/h,然后检测伺服阀电压值的变化,设初始电压值为V,过10ms后将模拟速度信号降为10Km/h,测试伺服阀电压值是否为0.043V左右并计算下降时间,预期的下降时间是在29ms~31ms范围内,与该时间进行对比。如果是的,说明着陆模块交叉保护正常。然后进行回溯对比,改变速度信号为20Km/h,计算电压上升时间是否<2s并检测此时电压是否与初始电压V一致,如果是的,最后说明着陆控制功能运行正常。着陆模块故障检測程序结构如图3.3所示。
4 结语
本文设计模拟了着陆模块检测系统,集成了信号模拟电路、DSP最小电路系统、信号调理电路及USB串口通信电路为一体的故障诊断模块。设计Labview开发软件完成了系统的自检功能,并提供了与DSP最小电路系统之间进行通讯的接口,使上位机PC系统能够动态的检测着陆模块控制器。该设计采用了硬、软件相结合的措施,使系统能够在外场测试环境下可靠稳定的运行,提高了系统的适应性、可靠性和稳定性。USB通讯采用了CRC冗余校验,容错率强,保证了通讯的准确传输。该设计解决了飞机着陆系统中难以实际操作的难题,模拟简单又不失拓展性,不仅如此,该设计结构还应用于工厂工人培训,各大高校大学生实验教学中都能拓展应用,具有良好的市场前景和应用价值。
参考文献
[1] 张念淮,江浩.USB总线接口开发指南[M].北京:国防工业出版社,2001
[2] 王晖.接口器件ISP1581的接口应用设计[J].新器件新技术,2004,8:4~43
作者简介
杜玉立(1991-)、硕士研究生、研究方向是智能机器人。
于宝成、副教授、博士、研究方向为智能机器人、自动化控制。
钱平(1993-)、硕士研究生、研究方向是智能机器人;
