露天矿电铲-卡车运行过程模拟系统研发
2017-07-19刘银柱潘海增孙效玉
刘银柱,潘海增,温 鹏,胡 帅,孙效玉
(东北大学资源与土木工程学院,辽宁 沈阳 110819)
机电与自动化
露天矿电铲-卡车运行过程模拟系统研发
刘银柱,潘海增,温 鹏,胡 帅,孙效玉
(东北大学资源与土木工程学院,辽宁 沈阳 110819)
以卡车位置、状态识别和转换为核心,采用时间步长与事件步长相结合的方法,实现了电铲-卡车工艺运行的有效模拟,提供了良好的可视化显示和丰富的统计计算,为后续分析生产过程、挖掘生产潜力、选择优化调度方法提供了有效手段。
露天矿;电铲;卡车;运行模拟
0 引 言
露天矿是以采掘为中心、运输为纽带的大型生产系统[1]。电铲-卡车间断工艺具有机动灵活、汽车爬坡能力大、转弯半径小、基建期短、基建投资少、掘沟速度快等优点,目前,国内外绝大多数露天矿以电铲采装、卡车运输的间断工艺和半连续工艺为主。由于采装与运输作业相互衔接,相互制约,铲车匹配与组合是生产计划、生产组织、生产调度的重要工作内容[2]。
矿山计算机模拟开始于20世纪50年代末期,大多数早期的模拟都是由用户以FORTRAN语言在主机上实现的,目前开发了许多的行业专用软件。露天矿电铲卡车运行模拟主要用来寻找合理的设备配套、数量配合[3-4],评价运输设备的调配原则[5],研究各种开拓运输系统的功能、运行规律、限制和使用条件,分析系统的薄弱环节、选取改进方案[5]等等。采用计算机模拟技术对露天矿电铲-卡车卡车运行及生产调度进行模拟具有重要理论意义与应用价值。
设计编写了一个能够进行铲车运行模拟程序,可人工设置模拟的起止时间以及卡车、电铲、排卸点的相关属性,并可实现与矿山实际道路与优化调度方法的有效衔接,为教学、科研与生产管理提供了有效手段。
1 系统功能设计
1.1 主体功能
将整个系统看成由m个装载点、n个卸载点、k台卡车构成的物流运输系统,其中装载点与卸载点之间通过道路网相连。主体功能主要模拟卡车位置的变化、卡车在装卸点的排队情况以及电铲、卡车、排卸点的状态变化。
其中装载点(电铲)具有以下属性:名称、型号、装载物料类型、矿质、装载速度、产量要求。
卡车具有以下属性:名称、型号、车厢装载容积、空车运行速度、重车运行速度。
排卸点具有以下属性:名称、卸载物料类型、矿质要求、卸载速度、产量要求。
1.2 道路网接口
道路网采用标准接口,实现与矿山实际道路的有效衔接,包括CAD、ArcGis、3DMine等多种格式。
1.3 实时运行统计
分时间、里程、产量进行统计,其中:
1)卡车时间计算:
待装时间=开始装车时刻-到达电铲时刻
装车时间=装完车时刻-开始装车时刻
待卸时间=开始卸车时刻-到达排卸点时刻
卸车时间=卸完车时刻-开始卸车时刻
重运时间=到达卸点时刻-装完车时刻
空运时间=到达电铲时刻-卸完车时刻
2)里程计算:
重运里程=∑重运路段长度
空运里程=∑空运路段长度
3)产量计算:
卡车产量=∑车厢装载容积×已完成车数
电铲产量=∑车厢装载容积×装载车数
排卸点产量=∑车厢装载容积×卸载车数
1.4 调度功能
每次装载完毕或卸载完毕,采用不同的调度方法对卡车进行调度,确定卡车运行装卸目标与行驶路线。主要调度方法包括固定配车法、最早装车法、最早装完车法、最小卡车等待法、最小电铲等待法、基于目标产量完成度与配车饱和度的方法等[6]。主要介绍第1部分功能实现方法。
2 系统开发设计
2.1 界面与操作设计
系统界面是人与机器之间传递和交换信息的媒介,按照外观简单明快、操作舒适简单的原则,参照常用的计算机软件,将界面划分为菜单栏、信息栏、控制栏、运行区域4个部分。
其中菜单栏实现主体功能;信息栏显示当前运行设备信息;控制栏用来控制运行模拟的速度和当前采用的调度方法;运行区域显示设备运行的位置、状态、物料等综合情况。在图形区单击右键,可弹出菜单,添加卡车、电铲等设备。
菜单栏分系统、窗口、显示控制、参数控制、查询统计、调度方法、帮助等几部分。其中系统:启动、暂停/继续、结束、退出。窗口:放大、缩小、平移。显示控制:显示道路、显示台阶、状态选择、显示速度。参数控制:模拟起止时间、模拟时间步长、电铲计划、排卸点计划、卡车计划、道路网选择。调度方法:固定配车法、最早装车法、最早装完车法、最小卡车等待法、最小电铲等待法、基于目标产量完成度与配车饱和度的方法。查询统计:产量、时间、里程。
2.2 模块划分
整个系统主要分为模拟主程序模块、路网及其接口模块、电铲模块、卡车模块、排卸点模块、调度模块、统计模块,对设备的位置、状态进行模拟。各模块主要功能分述如下:
1)模拟主程序模块:通过遍历函数进行卡车的遍历,并在遍历函数中对卡车相关状态函数和路网重绘函数进行调用。
2)路网模块:读取路网文件,实现实际坐标和屏幕坐标转换,利用GDI技术将道路网绘制到窗口中,完成任意两点间的最短路计算。
3)电铲模块:集成电铲相关的状态改变函数,实现电铲相关统计。
4)卡车模块:集成卡车相关的状态改变函数(定义为Truck控件)
5)排卸点模块:集成卸点相关的状态改变函数,完成排卸点相关统计。
6)调度模块:实现不同调度方法的计算。
为了有效定义卡车的各种属性,构建了一个名称为CTruck的类。该类定义了模型中的各类属性。除此之外,定义了一系列方法作为设备运行的“引擎”。这些方法根据时间或位置等信息判断当前状态(待装、装车、重运、待卸、卸车、空运等)。并依据位置状态变化调用Truck控件实现卡车的可视化。挖掘机模块与卡车模块类似,都是通过自定义类和控件的方式实现。
2.3 设备状态处理
卡车是连接装载点与卸载点的桥梁与纽带,卡车位置与状态的确定,直接影响着其他设备状态的确定,卡车周期运行顺序为装车→重运→待卸→卸车→空运→待装→装车。首先将电铲、卡车状态划分如下:
1)卡车状态。自身状态:包括装载、卸载、重运、空运、待装、待卸6种,
2)电铲状态。自身状态:装车、待车2种,其中装车与卡车装车相对应。
在模拟运行过程中,采用时间步长法与事件步长法相结合的方法进行位置、状态判断。处理顺序为:状态判断→状态处理(位置判断/等待/参数改变→状态改变。状态判断。采用事件步长法,按装车→重运→待卸→卸车→空运→待装→装车的周期循环逻辑进行状态转换。状态处理。采用时间步长法,卡车在初始化时获得初始位置。模拟程序时钟步进一个步长,总控模块扫描系统中的每台卡车时,调用卡车的move()方法,该方法定义在卡车模块的Truck控件中,作用是根据当前时间与初始时间计算当前位置与状态。状态处理主要实现位置判断、等待、参数改变3部分功能。①位置判断:采用时间步长法,按以下公式计算卡车位置:运行距离=遍历次数×设置的每次遍历卡车移动距离,其实质就是卡车运行速度乘上时间。当时间超过状态转换时间时,进行状态转换。②等待:设置等待循环参数,等待过程中该参数进行相应的自增运算(等待遍历次数可以设定)达到设定值后跳出等待状态。③参数改变:在相应控件中定义状态改变函数,比如在由等待转入重运时即调用相应的函数将卡车的相关参数改为重运参数。
3)状态改变。在状态处理完成后,就可以进行状态改变了,比如在等待结束后就可以进入空运/重运状态。
2.4 道路网及装卸点处理
2.4.1 路网文件的绘制
程序所使用的道路网文件来源于矿山的真实道路,提供CAD、GIS、3Dmine等多种接口方式,它反映了矿山真实的道路网形态,各节点坐标为真实的矿区坐标。各个节点依次相连构成了路段,各条路段构成了露天矿的道路网。
矿区坐标是矿山生产中经常用到的坐标系。不同于矿区坐标的是,显示坐标则是以像素点的位置确定的坐标,其单位为一个像素。另外显示坐标的坐标原点在计算机屏幕的左上角,以竖直向下为y轴,水平向右为x轴。在进行坐标转换时首先要获取矿区坐标的边界点。以距离最远的那对对角点作四边形,就是矿区边界,还应找到屏幕上绘图区域的边界坐标,通过计算比例系数即可将实际道路网转化为可以在屏幕上显示的道路网。
2.4.2 装卸点设置
在模拟设备运行的过程中,每个装卸点都需要与道路网一个结点相对应,为了简化操作,方便用户使用,界面程序提供了一个PTChosen()方法,可以让用户利用鼠标,在界面绘制出的道路网上右键单击鼠标时选择一个路段的起始结点。进而通过多级菜单可以选择装卸点类型、名称、物料等属性,装卸点设置结果可以保存到相应的文件中。
2.5 模拟流程
设备运行状态模拟流程控制逻辑如图1所示。

图1模拟主程序处理逻辑图
3 系统测试
本系统从2016年7月开始,采用Visual Studio.net 2013平台进行开发,至2017年2月开发完成模拟的主体功能,目前一方面采用多个矿山道路网对模拟主体功能进行测试,另一方面继续开发调度和统计部分功能。测试表明,主体部分达到了设计功能要求,抚顺西露天矿道路网进行测试画面如图2。
测试表明,本系统主要具有以下2大特点:
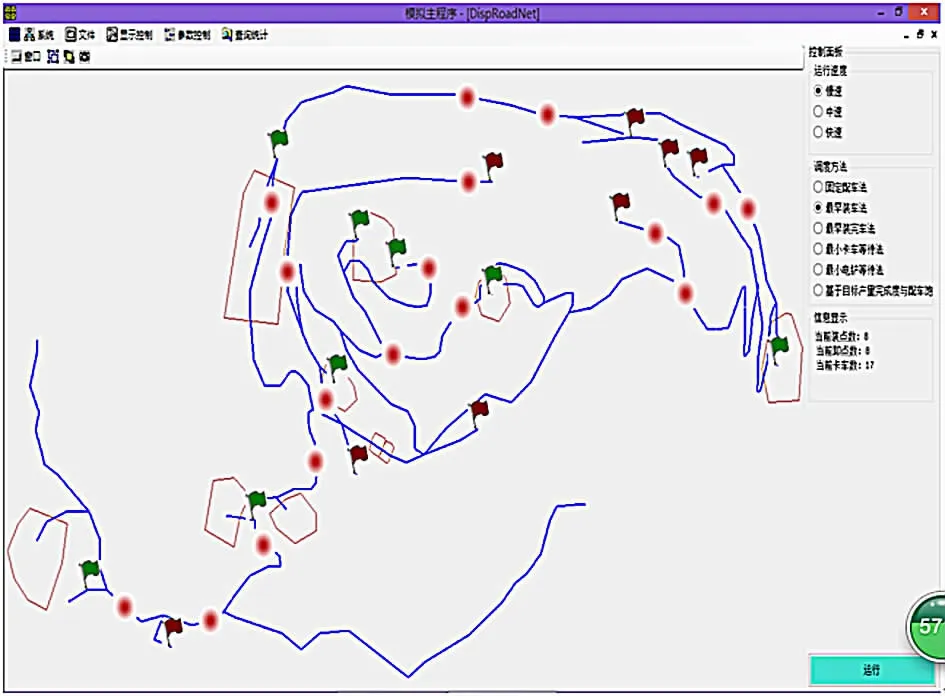
图2 系统界面
1)具有较强的通用性和扩展性:程序以实验室动态链接库为基础,该动态链接库一方面提供了最短路计算等通用标准接口,具有较强的通用性;另一方面采用面向对象设计,实现了较好的封装、继承功能,并预留了相应的扩展接口。如调度方法接口,可以保证无论后期研究出什么样的调度方法,只要按照本系统的标准接口即可嵌入进来,极大地提高了程序的可扩展性。
2)具有较高的实用性:系统提供CAD、GIS、3Dmine多种接口方式,可以实现与矿山道路的有效接口。只要提供某个矿山的道路网文件接口形式,就可以轻松读入并显示该矿道路网,进而可设置电铲、排卸点、卡车、物料等不同实体的属性,实现对该矿山的模拟。
当然,由于时间短,本系统还有许多扩展完善的地方,如没有考虑故障的影响、装卸车时间采用固定值等。而系统的扩展性也为进一步完善提供了有利条件。
4 结论
1)将整个模拟系统简化为s辆卡车在固定路网上的n各装卸点、m个卸载点之间运行的运输服务排队系统,简单而不失真,降低了开发难度。
2)以卡车状态识别为核心,采用时间步长和事件步长相结合的方法,将模拟系统划分为路网模块、电铲模块、卡车模块、卸点模块,通过主控模块对各模块进行总体协调和控制,具有良好的通用性和扩展性。
3)系统提供CAD、GIS、3Dmine等多种接口方式,可以实现与矿山道路的有效接口,具有较高的实用性。
4)系统目前没有考虑故障的影响,装卸车时间采用固定值,这些需要后续进一步完善。
[1] 王青,任凤玉.采矿学[M].第2版.北京:冶金工业出版社,2011.
[2] 白润才.露天矿卡车实时调度优化决策系统及应用效果预测研究[D].阜新:辽宁工程技术大学,2004.
[3] Hashemi A.S.,SattarvandJ..Application of ARENA Simulation Software for Evaluation of Open Pit Mining-Transportation Systems A Case Study,Proc.of the 12th Int.Symp Continuous Surface Mining-Aachen 2014:213-224.
[4] Ataeepour N.,Baaf E.Y.ARENA simulation model for truck-shovel operation in dispatching and non-dispatching modes [J].International Journal of Surface Mining, Reclamation and Environment.1999,13(3):125-129.
[5] 张婕,张莹,徐文立,等.面向对象的露天矿卡车调度系统可视化仿真[J].系统仿真学报,2004(3):538-540+545.
[6] 杨曌,赵红泽,温晓可,等.基于GPSS/H的露天矿生产系统仿真优化研究[J].煤炭工程,2015(2):123-125.
[7] 邢军,孙效玉.基于产量完成度和车流饱和度的露天矿卡车调度方法[J]. 煤炭学报,2007,32(5):477-480.
【责任编辑:解连江】
Research on simulation system of shovel-truck operating process in the open-pit mine
LIU Yinzhu,PAN Haizeng,WEN Peng,HU Shuai,SUN Xiaoyu
(School of Resources&Civil Engineering,Northeastern University,Shenyang 110819,China)
The article takes the truck location,state identification and transformation as focus,uses the method of combining time step with event step,achieves the effective simulation of shovel-truck process operation and provides good visual display and rich statistical calculation,which provide the effective means of the subsequent analysis production process,mining production potential and the selection of optimal scheduling methods.
open-pit mine;shovel;truck;operating simulation
TD422
B
1671-9816(2017)07-0035-04
10.13235/j.cnki.ltcm.2017.07.010
刘银柱,潘海增,温鹏,等.露天矿电铲-卡车运行过程模拟系统研发[J].露天采矿技术,2017,32(7):35-38.
2017-03-25
国家自然科学基金项目资助(51674063);国家重点研发计划项目资助(2016YFC0801608);东北大学国家级大学生创新创业训练计划项目资助(201610145028)
刘银柱(1994—),男,安徽砀山人,本科,东北大学采矿工程专业。