基于MPPT的太阳能充放电控制器的研究和设计
2017-07-18付华良刘艳云王一凡
付华良,刘艳云,王一凡
(常州纺织服装职业技术学院,江苏常州,213164)
基于MPPT的太阳能充放电控制器的研究和设计
付华良,刘艳云,王一凡
(常州纺织服装职业技术学院,江苏常州,213164)
文章设计出了一种基于单片机的太阳能充放电控制器,提高了MPPT效率,并能实时监控蓄电池充放电状态。延长蓄电池寿命,节约了系统成本。
MPPT;充放电控制器;蓄电池;扰动观察法
1 太阳能电池的等价回路及特性曲线分析
太阳能电池板等价回路如图1所示,其解析公式为:

其中,I为太阳能电池输出电路,V为输出电路,为光生电流,为二极管饱和电流,q为电子电荷量(1.6× 10−19C,Rs为电池并联电阻,n为二极管特性因子,k为波尔兹曼常数,T为太阳能电池温度,Rsh为太阳电池并联电阻。
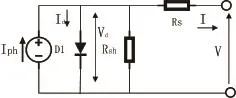
图1 太阳能电池等价电路
由伏安特性可知,变化的温度对太阳能电池的开路电压影响较大,而光照强度的变化对太阳能电池的短路电流影响较大。
2 MPPT算法分析
根据以上分析,太阳能电池在某一个相对稳定的环境下,有最大功率输出点,一般情况下,太阳能电池并没有一直工作在这个点,因此输出效率也很低,为了能够充分利用太阳能电池板,对光伏系统的最大功率跟踪就是必不可少的。
扰动观察法(P&O)结构简单,需要检测的参数少,对传感器精度要求低,应用较广泛。其思路如下:控制器在每个控制周期内都用一个固定干扰步长去改变电池板的输出电压和电流,同时实时采样改变步长前与改变步长后太阳能电池板输出的电压和电流值,并计算出功率值,比较改变前后功率变化值,假设用改变后的功率减去改变前的功率得到的ΔP>0,则说明改变步长的方向正确,下一个周期继续按原方向进行扰动;反之,如果ΔP<0,那么说明扰动是背离最大功率点,下一个周期则应该改变步长的扰动方向,直至找到最大点。采用固定步长ΔU的P&O算法,在远离最大功率点时会产生较大误差,同时会导致在MPP附近产生大幅震荡,能量损失严重。
本文采用可变步长的P&OMPP控制,当dP/dU>0,位于最大功率点左侧;当dP/dU=0,位于最大功率点;当dP/dU<0,位于最大功率点右侧。无功系统工作最大功率点的左侧还是右侧,当端电压逐渐接近最大功率点电压时,均单调递减,当系统工作在最大功率点时,dP/dU等于零。dP/dU的正负以及大小可以反映系统偏离最大功率点的方向和大小,基于上述特性,定义电压扰动的表达式为Usetk=Usetk-1+α×(ΔP/ΔU),其中α为步长调整因子,为正数,α的整定值不宜过大,其值应满足。对于上述可变步长的控制策略,当系统偏离最大功率点较大的时候,dP/dU也较大,跟踪的调整步长也较大;而当系统偏离最大功率点较小时,dP/dU也较小,提高了MPPT的跟踪精度。该算法的流程:首先采集当前UK、IK,并计算上一个时刻(k-1)采集的电压和功率和当前时刻(k)采集的数据的变化量ΔU和ΔP,当ΔU足够小的时候,可以用ΔP/ ΔU代替dP/dU,判断ΔP/ΔU,如果为零,说明工作在最大功率点,否则调整步长Usetk,直至工作在最大功率点处。
3 蓄电池充电方法分析
铅酸蓄电池的充电方法本文采用三阶段充电方法,首先对蓄电池采用恒流充电方式,在电池充电至80%-90%容量后,转为浮充(恒压充电)模式,为防止可能出现的蓄电池充电不足,最后再加上涓流充电,使已基本充足电的蓄电池极板内部较多的活性物质参加化学反应,充电较彻底,这一阶段的充电电压比恒压阶段的电压要低。
本文选用的太阳能电池开路电压为21.6V,最大功率100W,最大功率点的电压为18.17V,电流为5.51A;铅酸蓄电池为12V100AH。系统工作时自动检测太阳能电池板电压是否高于蓄电池电压,若高于蓄电池电压,则可开启充电;若低于蓄电池电压,则不能开启充电;当蓄电池处于浮充状态时电压控制在13.7V,当蓄电池电压低于10.8V时,自动关断负载,当蓄电池电压高于14.8V时,自动关断负载,当从高于14.8V回落到14.7V时自动接通负载。
4 系统硬件设计
4.1 DC/DC电路拓扑结构分析
实现MPPT的电路通常采用斩波器来完成直流/直流变换,斩波器电路分为降压型变换器(buck)和升压型变压器(Boost)。由前面的描述可知,本文的太阳能电池最大功率点电压大于蓄电池电压,所以选择buck型电路,其工作原理是使用PWM方法控制功率管Q的占空比,对电路输入电压进行调节,使太阳能电池内阻和负载进行阻抗匹配,从而使系统始终工作在最大功率点。其中开关管Q选用电压驱动型MOSFET,该开关器件驱动电路简单,开关损耗小;续流二极管D2选用肖特基二极管,满足开关器件高频率通断要求;滤波电感L和储能电容C2组成低通滤波器,可以消除由于开关器件高速通断带来的高次谐波干扰。
4.2 系统总体框图
系统总体设计框图包括控制器,采样电路、驱动电路等。控制器采用STC12C5204AD单片机为核心控制器件,主控芯片功能包括A/D采样、MPPT算法、充放电控制、PWM脉冲产生即驱动电路。通过太阳能电池电压电流采集模块采集电压电流进行MPPT算法,进而产生PWM信号驱动Buck变换电路的开关器件,使太阳能电池工作在最大功率点;通过采集蓄电池的电压信号,决定是向蓄电池充电还是蓄电池向负载放电,充电时采用三阶段充电法。蓄电池在使用过程中要避免过放,当临近放电终了,应立即停止放电,否则将给蓄电池带来不可逆转的损害。控制器通过控制MOS管Q2的开关,保护蓄电池过放。
4.3 采样电路设计
采样电路包括电池板的电压和电流采样以及温度检测。电压采样采用分压的方式实现,将实际电压经过1%精密电阻按比例进行衰减,将分压后的电压值输入到单片机AD通道进行检测。本系统在使用过程中,必须对蓄电池进行温度补偿,温度补偿主要是通过温敏电阻来釆样蓄电池工作环境中的温度,然后通过软件对蓄电池的电压进行相应的补偿。
5 系统软件设计
软件使用C语言编程,主程序框图如图2所示。系统工作时,首先初始化,然后采集环境温度,根据温度判断是否进行温度补偿,检测蓄电池电压来判断进入相应的充电子程序;检测太阳能电池的电压和电流,进入MPPT算法,判断直至找到最大功率点。

图2 MPPT主程序框图
6 实验结果
表1中为MPPT控制器的输出电压Vin、Iin和输出功率的实验记录,光照强度主要影响太阳能电池板的输出电流。本控制器使用的变步长的扰动观察法算法能实现最大功率点追踪,提高了太阳能电池的使用效率。

表1 太阳能电池输出
7 结论
本文使用的变步长的扰动观察法算法,能准确实现MPPT,提高系统的使用效率;同时设计的充放电控制器,能有效的控制太阳能电池板对蓄电池的充电,并保护蓄电池过放,延长了蓄电池的使用寿命,节省了系统成本。
[1]李安定、吕全亚,太阳能光伏发电系统工程[M].北京:化学工业出版社,2015.
[2]Al-Diab A ,Sourkounis C. Variable step size P&O MPPT algorithm for PV systems[A].Optimization Electrical and Electronic Equipment(OPTIM),2010 International conference on[c].IEEE,2010:1097-1102.
Research and Design on MPPT Algorithm Solar Charging and Discharging controller
Fu Hualiang,Liu Yanyun, Wang Yifan
(Chang Zhou Textile Garment Institute,Changzhou Jiangsu,213164 )
This paper design a kind of solar charging and discharging controller based on MCU. And it can evaluate state of battery and reduce the cost of the system.
MPPT;Charging and Discharging controller; battery; Perturb and Observer(P &O)method
付华良(1984-),山东德州人,讲师,硕士,主要研究方向为电子与通信工程、电气自动化技术。
2013常州纺院学术科研基金项目——微型家用智能光伏发电小系统的设计(编号CFK201309)。
刘艳云(1979-),河北保定人,副教授。
王一凡( 1977-),男,汉族,江苏常州人,副教授,研究方向为机电一体化技术、电气自动化技术。
