基于Pro/E行星齿轮减速板手的运动仿真
2017-07-18黄永程覃羡烘王鹏程李俏
黄永程+覃羡烘+王鹏程+李俏


摘 要:Pro/E软件进行三维模型的设计是在很直观的三维环境中进行,同时也为此避免了大量而且繁琐的空间尺寸计算,代之以直接的观察和测量来保证整个设计的正确性。行星齿轮作为重要的传动装置,在机械等领域应用十分广泛,行星齿轮减速扳手是种便携式扭矩放大螺栓紧固工具,其核心是一个2K-H行星轮系减速增力结构,行星轮系作为增力结构具有的体积小、效率高等优点,最重要的是采用行星轮系输入较小的力矩可以得到很大的输出力矩。本文是基于Pro/E对建立好的行星齿轮减速扳手进行装配约束并运动仿真,以满足其使用性能。
关键词:传动装置;行星齿轮;减速扳手;运动仿真
DOI:10.16640/j.cnki.37-1222/t.2017.14.248
0 引言
通过行星齿轮传动减速放大力矩,使得输入较小的力矩,就可以输出较大的力矩,从而“轻松”地松开和紧固螺栓。行星齿轮减速扳手有输入很小的力矩就可以得到很大的输出力矩,具有体积小、重量轻、便于携带、效率高和成本低等优点,很适合应用于我国货车运输领域。一般市场上销售的便携带式扳手,其工作原理是通过增大力臂和作用力来增大扭矩。这种扳手的输入力矩也就是输出力矩。而人所产生的作用力是有限的,只能通过增大力臂来增大输出力矩,即增长扳手手柄的长度,与其便于携带这一特点产生矛盾,且即使这样增大的输出的扭矩也有限。
20世纪70年代行星齿轮减速扳手第一次出现。70年代末日本、美国和德国等工业发达国家已有定型的大扭矩变扭扳手产品供应市场[1]。其中最大力的20-1800P型特尼扳手,最大输出扭矩达到1800N.m。现在国外的放大力矩扳手产品已向自动化,轻型化方向发展,而智能化已是其发展趋势。而国内已经有的研究都集中于将行星轮系作为减速器和变速器使用,包括运动的合成与分解。我国对用做力矩放大機构的行星轮系研究的非常少。
1 Pro/E各零件三维模型
Pro/E采用了模块的方式,可以分别进行草图的绘制、零件的制作等保证用户可按照自己的需要进行选择使用。参数化设计--相对于产品而言,我们可以把它看成是几何模型,而无论是多么复杂的几何模型,都可以把其分解成有限数量的构成特征,而每一种构成的特征,都可以用有限的参数完全约束,这就是参数化的基本概念。基于特征建模Pro/E是基于特征的实体模型化系统,工程设计人员采用具有智能特性的基于特征的功能去生成模型,如腔、壳、倒角及圆角,可以随意勾画草图,轻易改变模型。64型行星齿轮减速扳手的建模主要对齿轮、轴、芯架、筒体的建模,完成对部件的装配图,各个齿轮采用参数化建模[2-4],各个零件三维模型如下图所示:
2 创建连接方式
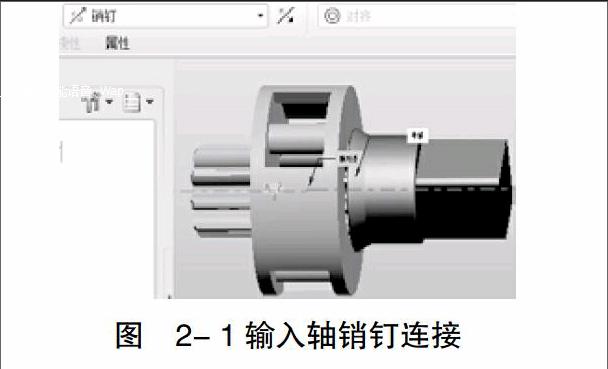
在装配环境中,选择连接类型创建机构连接,是运动仿真设置的最重要环节,该操作直接影响运动仿真的设置效果。连接就是元件与元件、元件与组件通过一定的约束集装配在一起,并限制两者的自由度,从而两者之间建立一个确定的运动关系。在装配模式下,建立连接的目的是限制零件部分和全部自由度,执行该操作是创建运动的先决条件。当向一个装配体中添加一个元件时,系统进入装配约束操作界面。在设置连接约束时,连接到装配体中的元件与装配体中其他的元件间存在相对运动,运动类型与选取的连接类型有关。每一种连接类型都与一组独立的几何约束相关联,而这些约束与传统的Pro/E装配约束(对齐、匹配)意义相同[5]。在设计一个机械装配时,应当熟悉元件与装配中其他各元件间相对运动关系和放置约束关系,以及该元件的自由度。例如:销钉连接需要定义一个轴对齐和一个平面匹配(对齐)约束或点对齐约束,这样销钉连接就有一个旋转自由度,这就意味着使用销钉连接的元件可以相对于它所依附的元件旋转,但不能在该元件上移动或移开,如图2-1所示是输入轴的销钉连接:
由于销钉约束是最基本的连接类型,将元件连接至参照轴,元件可以绕指定轴旋转,具有1个旋转自由度。如图2-2、图2-3是约束后的装配图,为后续仿真做准备。
3 建立动力模型
在Pro/E5.0中,单靠设置元件与组件的约束方式,使元件在组件中保留部分自由度,元件在组件中仍然无法移动或旋转,必须对该连接组件的某些元件赋予动力,这样元件才能够做仿真运动。在机械操作环境中,伺服电动机能够为机构提供“动力”,而使用运动副可实现机构中两构件互做相对运动的活动联接。伺服电动机可规定机构以特定方式运动(可以实现旋转及平移运动),并且能够以函数的方式定义运动轮廓。伺服电动机引起在两个主体之间、单个自由度内的特定类型的运动,将位置、速度或加速度指定为时间的函数,并可控制平移或旋转运动。通过指定伺服电动机函数,可以定义运动的轮廓。允许用户从多个预定义的函数中选取指定函数,也可输入自己的函数,并且可以在一个图元上定义任意多个伺服电动机。最终选择输入轴为运动轴,如图3-1所示:
在轮廓选项中,规范一栏选择速度并输入速度值为300,如图3-2所示:
4 建立运动副
机构的重要特征是构件之间具有确定的相对运动,为此必须对各个构件的运动加以必要的限制。在机构中,每个构件都以一定方式与其他构件相互接触,两者之间形成一种可动的连接,从而使两个相互接触的构件之间的相对运动受到限制。两个构件之间的这种可动连接,称为运动副。运动副限制了两构件之间的某些运动,而又允许有另一些相对动。两构件组成运动副时,构件上能参与的点、线、面称为运动副元素[6]。
由于该机构属于齿轮传动,使用齿轮副可以控制两个连接轴之间的速度关系,用以模拟齿轮系统的仿真运动。设计者可以方便地定义齿轮参数,从而大大提高了设计效率。齿轮副中的每个齿轮都需要定义两个主体和一个约束集。第一个主体指定为托架,通常保持静止。第二个主体能够运动。根据所创建的齿轮副的不同,该运动副可分为“标准”和“齿条与齿轮”两种类型。最终定义的齿轮副连接如图4-1所示:
在装配设计中,确定零件间运动关系,给定主动件的运动并且给个伺服电机,可以模拟显示整个机构的运动,通过动态仿真可以检查机器各零部件间的位置约束和运动关系的正确性。
上述过程给出了行星齿轮减速扳手三维实体传动之间连接的过程,其传动部件的连接过程可以仿此进行。图4-2是运动仿真图片:
5 总结
Pro/E中的机构运动仿真模块Mechanism进行装配模型的运动学分析和仿真,使得原来在二维图纸上难以表达和设计的运动变得非常直观和易于修改,并且能够大大简化机构的设计开发过程,缩短开发周期,减少开发费用,同时提高产品质量。在Pro/Mechanism中创建的机构,可以导入到Pro/E Mechanica motion中,以便进行进一步分析,或者将机械设计模型引入到设计动画中。Pro/E运动仿真大大提高了工作效率,降低生产成本。对于促进企业的技术的进步和发展具有良好的推进作用。
(下转第285页)
(上接第280页)
参考文献:
[1]日本工业.技术展览会.北京,1975.
[2]孙恒,陈作模.机械原理[M].第七版.高等教育出版社,2006.
[3]濮良贵,纪名刚.机械设计[M].第八版.高等教育出版社,2010.
[4]周大伟.Pro/E参数化设计在直齿轮建模中的应用[J].河南科技,2014(11):135.
[5]张延,胡修池.Pro/ENGINEER Wildfire 5.0应用教程[M].机械工业出版社,2012.
[6]叶华.Proe(MXD)运动仿真与机构运动分析实例[J].智能城市,2016(11):96.
项目名称:广东理工学院精品资源共享课机械制图与CAD(JPKC2015001)
作者简介:黄永程(1989-),男,安徽宿州人,硕士,助教,研究方向:数字化设计与制造。
*为通讯作者
