基于三次样条函数的侧扫声纳定位数据平滑方法研究
2017-07-18胡迺成
成 芳,胡迺成
(中国人民解放军91439部队,辽宁 大连 116041)
基于三次样条函数的侧扫声纳定位数据平滑方法研究
成 芳,胡迺成
(中国人民解放军91439部队,辽宁 大连 116041)
针对侧扫声纳定位采样率与回波采样率不同步的问题,提出基于三次样条函数的定位数据平滑方法,将定位数据与回波数据一一对应,避免声纳图像产生空白区或像素重叠。实验数据结果表明:该方法可对定位数据进行较好的平滑,有效消除拖鱼因航向改变或航迹不稳而产生的航迹线折点,从而消除了声纳图像中的条形、扇形裂缝,解决了由采样率不同引起的声纳图像不连续现象,为后续地理编码图的处理提供了前提。
侧扫声纳;图像;Bezier函数;回波数据;GPS数据;采样率;Ping
侧扫声纳图像是侧扫声纳系统对海底的直观反映[1-4]。如何根据各时刻回波数据形成声纳图像是精细描绘海底地形和准确提取水下目标空间属性信息的基础。而目前,由于GPS采样率与侧扫声纳回波采样率的不同[5-18],造成在定位数据采样时间间隔内,不同Ping对应同一位置,经过地理编码后侧扫声纳图像存在重叠,这将严重影响海底地形的精细描绘和海底目标物的准确提取,因此,侧扫声纳成图过程中定位数据的平滑便成为声纳图像(地理编码后)是否准确的制约因素。为此,本文重点研究GPS采样率与回波采样率不同步问题,提出基于三次样条函数的定位数据平滑方法,实现定位数据与回波数据的完美融合,为后续声图的地理编码提供了良好的前提条件。
1 基于三次样条函数的定位数据平滑方法
1.1 方法提出
设Ti,Ti+1为定位系统中两个相邻点位Pi(yi, xi),Pi+1(yi+1,xi+1)处的记录时间,通过将Ti,Ti+1与Ping更新时间比较,可确定Ti~Ti+1时间内,拖鱼接收到的Ping线数量n,如图1所示。

图1 Ti~Ti+1时间内,拖鱼接收的Ping数量
设L为Ti~Ti+1时间内拖鱼航行距离。一般认为相邻时间内船速恒定,因此,在Ti~Ti+1时间段内对航迹进行等距插值,使Ping线在Pi(yi,xi),Pi+1(yi+1,xi+1)内航迹均匀分布,则第k条Ping线对应的航迹点Pk(yk,xk)距Pi(yi,xi)的距离为:

设过Pi(yi,xi),Pi+1(yi+1,xi+1)的航迹函数为x= f(y),则Ti~Ti+1时间内拖鱼航行距离为:


事实上,不同侧扫声纳的采样率及不同GPS的采样率均不尽相同。但普遍地,侧扫声纳采样率要大于GPS采样率,即fc=kf(G其中,fc为侧扫声纳采样率,fG为GPS采样率,k>1)。经上述方法等距插值后,可消除由采样率不同造成的航迹分布不均而引起的条带裂缝,但由于航向改变或航迹不稳造成的Ping线交叉,使声纳图像依然存在扇形裂缝,见图2。
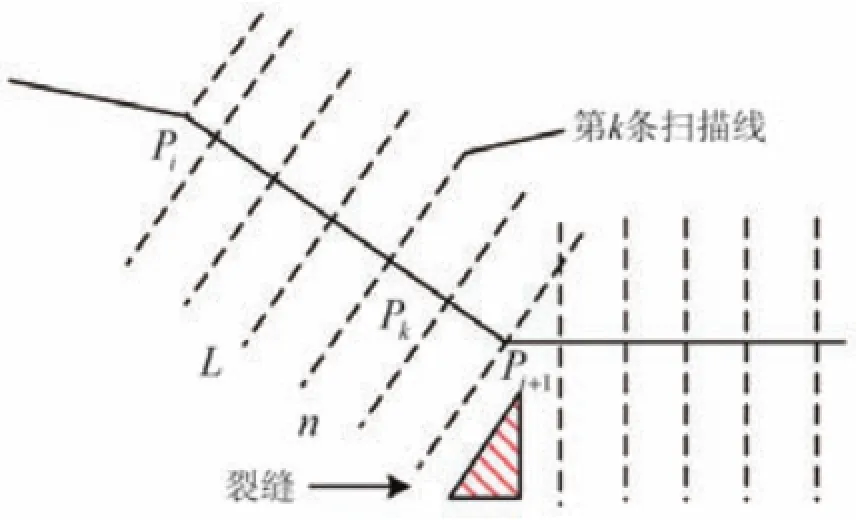
图2 等距插值后航迹转弯处可能出现的裂缝
事实上,高次插值函数的计算量大,有剧烈振荡,且数值稳定性差;分段插值中,分段线性插值在分段点上仅连续而不可导,分段三次埃尔米特插值有连续的一阶导数,如此光滑程度常不能满足需要,样条函数可以同时解决这两个问题,使插值函数既是低阶分段函数,又是光滑的函数,并且只需在区间端点提供某些导数信息。因此利用三次样条函数(三次Bezier曲线)对航迹点进行平滑处理,来消除扇形裂缝。即由Bezier曲线方程x=fBezier(y)替换x=f(y),由LBezier替换L,由FBezier(y)替换F(y),于是式(1)和式(2)可化为式(4)和式(5):
即可消除声纳图像中由航迹不稳造成的扇形裂缝,其效果见图3。

图3 航迹三次样条函数平滑后的效果
1.2 算例分析
选取某海域原始侧扫声纳数据作为实验数据,该数据由EdgeTech4200-FS型侧扫声纳[7]测量获得。在进行该测线测量时,发射脉冲中心频率为403 kHz,发射脉冲宽度为3 ms,量程为75 m,数据采样间隔为0.015 6 ms。
按该型号侧扫声纳的数据格式对原始数据进行解析[19],分离出每条扫描线的序号和拖鱼航迹坐标经纬度。从分离出的数据可看出,定位数据约5Ping更新一次,实例说明了定位采样率与回波采样不同步的现象。若不进行定位数据的平滑处理,在像素重采样时,易造成相邻多条扫描线相互重合,而在航迹特征点之间形成条带裂缝,为后续地理编码带来不便。
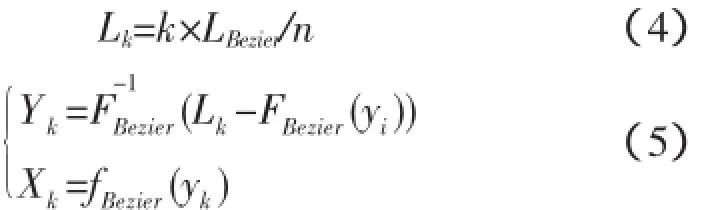
采用上节提出的方法对定位数据进行处理,处理结果如图4~图6。
图5 定位数据经三次样条函数平滑后的声纳图像
图4 为定位数据经等距插值后的声纳图像,图5为对等距插值后的定位数据,利用三次样条函数(Bezier曲线)平滑形成声纳图像。图4中虽然消除了条形裂缝现象,但仍存在扇形裂缝,其主要分布在航迹拐点处,且航迹拐角越大,扇形裂缝也就越大。图5中海底成像效果较好,声纳图像平滑,消除了扇形裂缝。
通过以上实例,可以得到以下结论:
(1)由于定位采样率相对回波采样率低,造成声纳图像中灰度重合或产生裂缝现象,其中灰度重合表现为相邻多Ping回波归算点位重合,裂缝现象表现为相邻Ping间隔大;
(2)定位数据的等距内插可有效消除声纳图像中条形裂缝现象,但扇形裂缝仍存在;
(3)对等距插值后的定位数据进行三次样条函数拟合,定位数据得到较好的平滑,消除了拖鱼因航向改变或航迹不稳而产生的航迹线折点,从而消除了扇形裂缝。
2 结论
本文对侧扫声纳定位采样率与回波采样率不同步的问题进行了研究,旨在解决如何根据侧扫声纳系统对海底或测量环境的离散采样数据,获取平滑的海底声学图像。通过本文研究,得到以下结论:
(1)由于定位采样率与回波采样率不同,在定位数据采样时间间隔内,不同Ping对应同一个位置,而航迹特征点之间又无ping线,经过地理编码后侧扫声纳图像存在重叠或裂缝;
(2)利用等距插值法对定位数据进行平滑,可有效消除声纳图像中的条形裂缝,但当拖鱼航向发生改变或航迹不稳时,无法消除折点处的扇形裂缝;
(3)采用本文提出的基于三次样条函数的定位数据平滑方法对等距插值后的定位数据进行平滑,消除了拖鱼航迹线上的折点,从而消除了扇形裂缝。
[1]来向华,潘国富,苟诤慷,等.侧扫声纳系统在海底管道检测中应用研究[J].海洋工程,2011,29(3):117-121.
[2]刘雁春,暴景阳,李明叁.我国海洋测绘技术的新进展[J].测绘通报,2007(3):1-7.
[3]刘雁春,翟京生,翟国君,等.海洋测绘学科发展现状[R].中国测绘学科发展蓝皮书(2004卷),北京:测绘出版社,2005.
[4]FlemmingBW.Side scan sonar:a practical guide[J].The International Hydrographic Review,1976,53(1):65-92.
[5]Discover 4200-MP Side Scan Processor Software User’s Manual[R].edgetech,2008.
[6]4200 Series High Definition Dual FrequencySide Scan Sonar System[R].edgetech,2008.
[7]4200-FSHigh Definition,Multi-pulse,Dual FrequencySide Scan SystemUser’s Hardware Manual[R].edgetech,2008.
[8]4200 Side Scan Sonar SystemUser Hardware Manual[R].edgetech,2010.
[9]J-Star Full SpectumDiagnostic Software Technical&User’s Manual[R].edgetech,2010.
[10]2000 Series Combined Side Scan Sonar and Sub-BottomProfilingSystemUser’s Manual[R].edgetech,2010.
[11]3100-P Portable Sub-BottomUser Hardware Manual[R].edgetech,2014.
[12]3100-P Portable Sub-BottomProcessor Sotfware[R].edgetech,2007.
[13]3200-XSSub-BottomSystemUser Hardware Manual[R].edgetech,2015.
[14]4125 Side Scan Sonar SystemUser Hardware Manual[R].edgetech,2010.
[15]4125 Magnetometer Interface User Hardware Manual[R].edgetech,2015.
[16]Discover 4125 Side Scan Processor Software User’s Manual[R].edgetech,2010.
[17]6205 Bathymetry&Side Scan Sonar User Hardware Manual[R].edgetech,2015.
[18]刘江,蔡伯根,唐涛,等.基于GPS的列控轨道地图数据生成方法研究[J].测绘学报,2011,40(1):111-117.
[19]Description ofthe Edgetech(.jsf)File Format[R].edgetech,2011.
Research on the Smoothing Method of Side Scan Sonar Positioning Data Based on Triple Spline Function
CHENG Fang,HU Nai-cheng
Troop 91439 of the People's Liberation Army,Dalian 116041,Liaoning Province,China
Aimed at solving the problem of inconformity of positioning and echo sampling rates,this paper puts forward the smoothing method of side scan sonar positioning data based on the Triple Spline Function.Through the one-to-one correspondence between the positioning data and echo data,blank area and pixel overlap of sonar images are eliminated.The results indicate the feasibility of this method,which can effectively eliminate the line inflection and thus bars or sector gaps,so as to solve the problem of image discontinuities caused by different sampling rates.It offers a premise for processing subsequent geocoding.
side scan sonar;image;Bezier function;echo data;GPS data;sampling rate;Ping
P229.1
A
1003-2029(2017)03-0023-04
10.3969/j.issn.1003-2029.2017.03.005
2017-01-08
国家自然科学基金资助项目(41374108,41476087)
成芳(1981-),女,博士,工程师,主要从事系统总体与海洋环境测量研究。E-mail:chengfangtl@163.com
