基于行驶车速的车辆防撞时间预警算法
2017-07-18刘庆华邱修林谢礼猛王骏骅方守恩
刘庆华,邱修林,谢礼猛,王骏骅,方守恩
基于行驶车速的车辆防撞时间预警算法
刘庆华1,2,邱修林1,谢礼猛1,王骏骅2,方守恩2※
(1. 江苏科技大学计算机科学与工程学院,镇江 212013;2. 同济大学交通运输工程学院,上海 201804)
针对一般车辆碰撞时间(time to collision,TTC)算法预警阈值固定造成车辆低速行驶中出现预警过早及高速行驶出现预警不及时的问题,该文提出一种基于行驶车速的车辆防撞时间预警方法。行驶车辆通过车载设备实时获取自车与他车的状态信息,根据车辆状态信息建立高斯平面坐标系获取车辆位置坐标,对车辆可能发生的碰撞进行分类处理,依据车辆行驶速度设定相应的安全防撞时间,然后将车辆发生碰撞需要的时间与安全防撞时间进行比较,存在碰撞危险则通过预警显示提醒驾驶员。试验结果表明:该方法预警准确率达88.89%,而一般TTC固定阈值方法则预警过早率达81.48%,预警过晚率达70.37%,故该方法对进行车辆危险预警更有效,更符合实际车辆防撞情形,提高了车辆行驶的安全性,可为车辆的及时预警提供参考。
车辆;交通;安全;防撞预警;碰撞时间(TTC)
0 引 言
随着汽车数量的剧增,导致交通拥堵、交通事故频发及交通环境恶化等问题,威胁着人的生命安全及财产损失。每年中国有超过10万人因交通事故致死,造成的损失达数百亿元,车辆间碰撞事故占到我国道路交通事故总量的2/3以上[1]。如何减少交通死亡人数和造成的经济损失成了重要的课题,关于车辆防碰撞预警系统的研究就应运而生。预警系统集成通信及信息处理等先进技术,通过车载设备间的互联可实时获取道路和车辆状态信息,进行车辆防撞预警算法处理,出现危险及时提醒驾驶员采取措施,对于保障交通安全行驶及改善交通环境有着深远的影响。
车辆防撞系统对其预警算法有很高要求,算法的准确性与实时性是研究的重点[2]。近年来国内外对车辆防撞预警算法的研究取得了一些成果,主要分为安全时间算法和安全距离算法。安全时间算法主要以距离碰撞时间为研究对象,如日本东京农工大学的TTC模型[3]。安全距离算法主要是基于车辆的运动学关系确定安全车距,如Mazda制动模型及Honda模型等[4-6]。Benamar等提出基于预定的TTC(time to collision)阈值确定所需的安全距离模型[7]。于广鹏等提出基于纵向避撞时间的纵向碰撞预警/避撞算法[4]。裴晓飞等通过对避撞时间倒数(TTC-1)的研究建立危险系数的分级预警与主动制动安全距离模型[8]。王建强等通过真实道路试验数据,提出适应驾驶员特性的避撞时间TTC的报警算法[9]。早期预警系统算法为车辆提供预警框架,并设定默认距离碰撞时间(TTC)的预警阈值,当预测的碰撞时间达到设定的阈值时,则给驾驶员和车辆提供安全警报信息[10]。实中车辆运行状态及道路环境各不相同,若始终以默认的TTC预警阈值来衡量是否安全,预警结果将可能不准确。例如,若两车低速行驶,即使距离较近也不存在碰撞危险,不需要过早预警;若两车高速行驶,如果阈值设定不合适容易造成预警不及时,从而发生碰撞。
针对TTC预警阈值固定这个缺点,本文提出一种基于车辆行驶速度的安全防撞时间预警方法。该算法依据车辆不同的行驶速度设定不同的安全防撞时间,通过与车辆发生碰撞需要的时间比较进行危险预警。
1 车辆防撞算法模型
图1为车辆防撞预警处理过程,首先车辆通过车载设备实时获取自车与他车的经纬度、车速及航向角信息,根据经纬度转化的高斯平面坐标系获取车辆位置坐标,依据车辆坐标及航向角对可能发生的碰撞进行分类,对分类后的直线碰撞和侧面碰撞分别进行算法处理。根据车辆的行驶速度确定不同的安全防撞时间,然后安全防撞时间与车辆发生碰撞需要的时间进行比较,存在碰撞危险则进行预警显示。
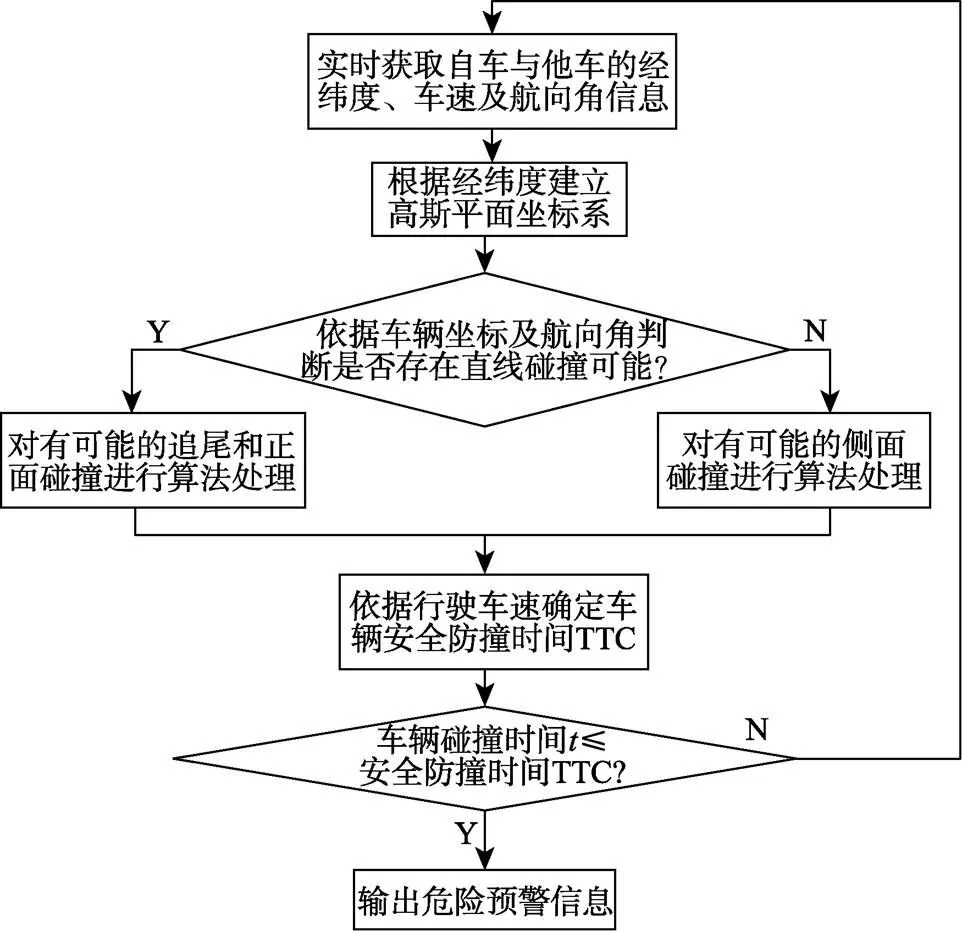
图1 车辆防撞预警处理流程图
1.1 建立高斯平面坐标系
车载设备通常接收的位置信息是WGS-84坐标(经纬度形式),进行车辆之间相对距离计算及建立车辆模型非常不方便处理,需要进行坐标系转化。一般WGS-84坐标通过高斯-吕克投影转化为高斯平面坐标。高斯平面坐标系以中央子午线的投影为轴,北向为正,赤道的投影为轴,东向为正[11-12]。中国位于北半球,投影后轴坐标都为正,轴坐标有正有负,为避免出现负的横坐标,规定横坐标加500 km[13]。通过坐标转化公式,可将经纬度坐标(,)转化高斯平面坐标(,)。WGS-84坐标转化高斯平面坐标关系为
(2)
式中0为赤道至纬度为的平行圈的子午线弧长,m;为投影点经度与该点所处经度带轴子午线经度0的差,(°);=-0,0=63,=round[(+3)/6];;;为卯酉圈曲率半径,m;和为高斯坐标系的横纵轴,m。0的公式为

式中参数0、2、4、6、8、的公式为
(4)

(6)
(7)
(9)
可得(1,1)和(2,2)分别为自车和他车在高斯平面坐标系下的位置坐标。将定位天线放置在每辆车的中心位置,得到车辆的中心坐标,方便进行车辆安全防撞预警。
1.2 车辆碰撞分类
车辆在实际行驶中无需对所有的车都进行碰撞预警处理,通过对可能发生碰撞的车辆进行分类,可以减少对无危险车辆的处理,同时便于对不同类型的碰撞使用不同的预警算法处理[14]。高斯平面坐标系下可以获取自车与他车的坐标信息及航向角,通过建立数学模型对可能发生的碰撞进行分类:直线碰撞和侧面碰撞。直线碰撞包括正面碰撞和追尾碰撞。车辆的行驶方向、速度及间距是车辆安全驾驶的关键,本文根据车辆行驶方向建立碰撞分类模型,两车关系见图2所示。
依据1和2的关系将碰撞类型分类:
4)对于其他情况,车辆不存在危险。
α由车载设备可直接获取,β通过高斯平面坐标系下的车辆坐标求得
通过表1可求值。此处若=1,则=2;若=2,则=1,通过可得的值。
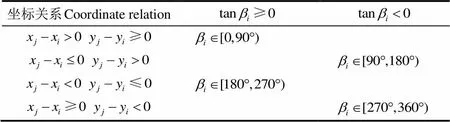
表1 tanβi与车辆坐标关系
注:,12,且≠。
Note:,12,and≠.
1.3 车辆碰撞类型及算法
算法依赖于相对运动关系,需要准确获知车辆位置信息,同时要考虑驾驶员反应时间及制动时间。车辆碰撞分类完成后对不同的情况进行不同的处理。各碰撞算法参数如图3所示。
1.3.1 对于直线碰撞
两车中心位置连线的距离通过车辆坐标计算可得m。自车速度为1(km/h),他车速度为2(km/h)。
2) 对于直线碰撞里的追尾碰撞,如图3b所示,当自车是主动追尾时,若且,发生追尾碰撞需要的时间为

不满足上述速度与角度条件则不进行处理。当自车是被动追尾时,若且,那么他车追尾需要的时间
(12)
不满足上述速度与角度条件则不处理。
1.3.2 对于侧面碰撞
在两车维持当前车速及行驶方向不变情况下,依据当前运动状态预测车辆未来运行轨迹,确定碰撞点及车辆碰撞时间,计算两车距离碰撞点的时间差进行判断是否存在碰撞危险。 发生侧面碰撞的前提条件:两车距离碰撞点的时间差,自车到达碰撞点的时间为,他车到达碰撞点所需的时间为,这里D取2 s。当满足条件时,将自车与他车到达碰撞点的时间与各自车辆的安全防撞时间进行比较,判断是否需要进行预警显示。
对于图3c所示的侧面碰撞模型来说,分3种情况:

1.4 安全防撞时间
安全防撞时间是驾驶员采取措施恰好避免危险所需的最短时间,包括驾驶员反应时间及控制车辆(转向、制动)所需时间[15]。通过确定这些参数可以确定车辆的安全防撞时间。
制动系统响应时间包括制动器协调时间、制动力增长时间及持续制动时间[4-5]。对于制动器协调时间,即制动踏板开始踩下到制动生效的时间,一般液压制动器需要的时间为0.2 s;对于制动力增长时间,即制动生效到液压器产生制动的时间,一般为0.15~0.3 s,本文的取0.2 s,且汽车制动减速度线性增长;持续制动时间计算公式如下
其中为车辆的行驶速度, km/h;为重力加速度,取9.8 m/s2;为轮胎-路面附着系数,干燥路面取0.75,雨天路面取0.5,积雪路面取0.3,结冰路面取0.1[17]。持续制动时间随车速变化而变化,为制动最大减速度,不同路面附着系数制动效果不同。
行驶车辆发出碰撞危险预警,从驾驶员反应到采取制动措施致使车辆停止需要的安全防撞时间TTC计算公式如下

由式(12)得,安全防撞时间与车辆的行驶速度有关,不同行驶速度下的安全防撞时间见图4a所示。依据不同的车速确定不同的安全防撞时间,同时通过检测车速的变化,及时改变车辆的安全防撞时间。系统通过车载设备实时且连续接收车辆状态信息,当满足直线碰撞和侧面碰撞的前提条件时,实时计算车辆发生碰撞需要的时间与安全防撞时间进行比较,存在碰撞危险则在应用设备上进行预警语言提醒。如果他车行驶速度过快,是造成碰撞危险的主因,应用设备可发送语言消息给他车提醒减速行驶。
对于一般的TTC算法,通过建立固定阈值来进行预警。通常设定,危险警告;,危险提示;,无危险[16]。图4b为一般的预警算法TTC与本文的安全防撞时间TTC的预警时间比较。从图4b可得,当车速低于31.752 km/h时,本方法与一般的TTC算法都可以有效进行预警,而一般的TTC算法提前至少2 s进行危险提示,容易造成驾驶员不重视预警提示;当车速在31.752~84.672 km/h时,本文方法已经预警的情况下,一般的TTC进行了危险提示,没有达到危险警告阶段;当车速大于84.672 km/h时,本方法已经预警的情况下,一般的TTC无危险显示,会造成碰撞危险。
2 车载通信系统
图5所示的车载通信系统包括应用层、车内局域网和车载设备。应用层包括防撞算法模型和预警信息显示;局域网具备上网能力;车载设备具备高精度定位模块、DSRC通信模块及网络接口。高精度定位模块用于获取自身车辆的位置,DSRC通信模块通过DSRC实现与附近车辆的实时通信,网络接口通过车内局域网实现与应用层的连接。相互通信的车载设备间通过定位模块获取自车经纬度和地面航向角信息,通过速度传感器获取自车速度。
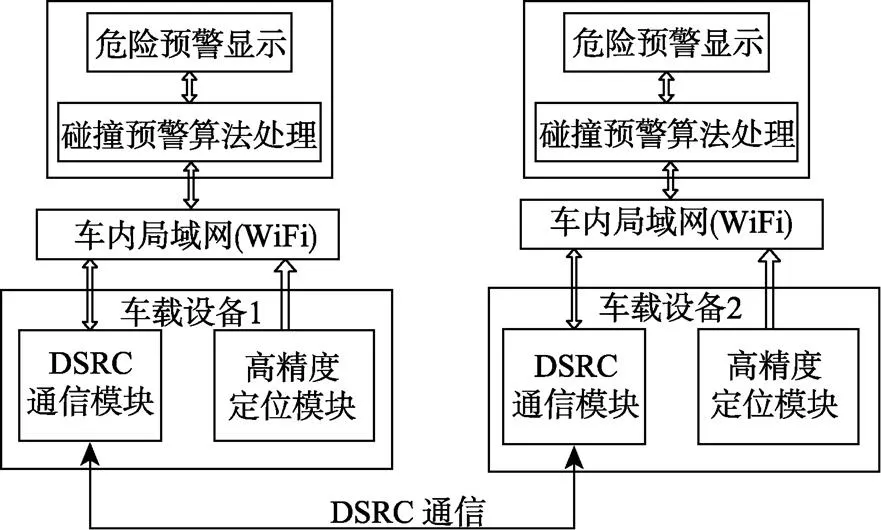
图5 车载通信系统
2.1 定位模块
车辆防撞预警要求车辆定位精度高,以及车辆信息获取连续可靠。定位精度受多径效应、天线中心相位偏差和公共卫星数目等因素影响[17-18]。在城市密集区,卫星信号容易被高层建筑和立体式交通遮挡,造成信号较弱或无信号,从而定位不精确[17]。本文的车载设备采用NOVATEL和司南的板卡,配合使用协同定位及卡尔曼滤波算法,使得定位误差减少到cm级别。对于协作定位,车载设备采用实时载波相位差分技术(real-time kinematic,RTK)定位,车辆定位可达cm级别[19-21]。车辆高速移动导致定位误差增加,可通过卡尔曼滤波对车辆位置偏差进行修正。本文高精度定位的实现条件:在空旷地带、保持四颗以上的卫星信号及加入外网。本文利用卫星导航系统和惯性导航系统的互补特性,将北斗/GPS定位和惯性导航通过信息融合方法有机结合起来,形成组合定位系统[22-23]。
2.2 DSRC模块
DSRC是高效的无线通信技术,可实现短距离内对高速移动的目标的识别和双向通信,将车辆和道路有机连接,成为ITS(Intelligent Transport System)的重要通信平台[24-27]。DSRC系统提供高速的数据传输,保证传输过程低延时及低干扰,可在智能交通体系中快速的传播大量的实时信息[27-29]。DSRC目前还没形成统一的国际标准,本文车载系统采用美国IEEE802.11协议,可以适应高速移动的车载环境,通信距离可达1 000 m,满足车载通信的需求。
2.3 应用层模块
应用设备通过局域网获取车载设备IP,然后使用socket通过TCP协议与定位端口和DSRC端口建立连接可实时获取数据,通过解析得到当前车辆的状态信息。车辆信息可在应用设备上进行计算处理,这样安全防撞模型的开发可以不受车载设备的限制。应用设备通过建立车辆安全防撞模型,利用获取的车辆状态信息进行分析处理,存在危险则通过预警显示提醒驾驶员,实现辅助驾驶的功能。
3 仿真与实车试验及结果分析
3.1 仿真试验
试验使用交通仿真软件VISSIM 6.0,VISSIM里面有路网、车辆和信号灯等组件[30-32]。仿真试验选择十字交叉口为中心的路段,首先使用VISSIM构建路网,然后在路网上添加车辆、信号灯等元素。试验路面选择为干燥路面,设定行驶车辆的低速为10~30 km/h,中速为30~60 km/h,高速为60~90 km/h。试验通过外部驾驶员模型控制车辆的运动及行驶速度,通过调用COM接口里面封装好的函数获取车辆的位置坐标和航向角信息进行防撞预警算法处理,存在危险预警及时通过外部驾驶员模型控制车辆制动。仿真运行后将车辆运行轨迹输入仿真冲突分析软件SSAM进行车辆碰撞事故的统计[33]。
仿真试验分6组,6组车辆分别对应如表2中自车与邻车的中、低、高速度,其中低速是10~30 km/h,中速是30~50 km/h,高速是50~70 km/h,每组情况统计100次,每次要求车辆在规定的速度档内正常行驶,试验路段以十字交叉路口为中心设定车辆间行驶存在直线碰撞和侧面碰撞的可能,统计不同方法在预警显示及采取制动措施的情况下车辆是否发生碰撞,以及车辆未存在预警显示时候是否发生碰撞。仿真预警试验的算法比较是关于一般TTC固定阈值方法与本文提出的基于车速确定安全防撞时间之间的性能比较。本文方法只要出现预警就控制车辆刹车;一般的TTC存在二级预警,通过外部驾驶员模型控制车辆在3~5 s之间进行刹车,模拟现实情况下驾驶员面对两级预警出现的状况。
由表2可以看出,对于本文方法在预警显示情况下可以很好的实现车辆防撞预警工作,有效减少交通事故的发生,仅存在个别碰撞漏报的情况。当两车都为高速行驶时候,存在少量误警,是因为过快的车速使得本文的安全防撞时间误差变大,从而出现预警有些晚的情况,同时导致碰撞漏报的情况发生。但是,在实际车辆行驶过程,一般道路上限速70 km/h,这样本文提出的方法可以有效进行一般道路上实车的防撞预警功能。
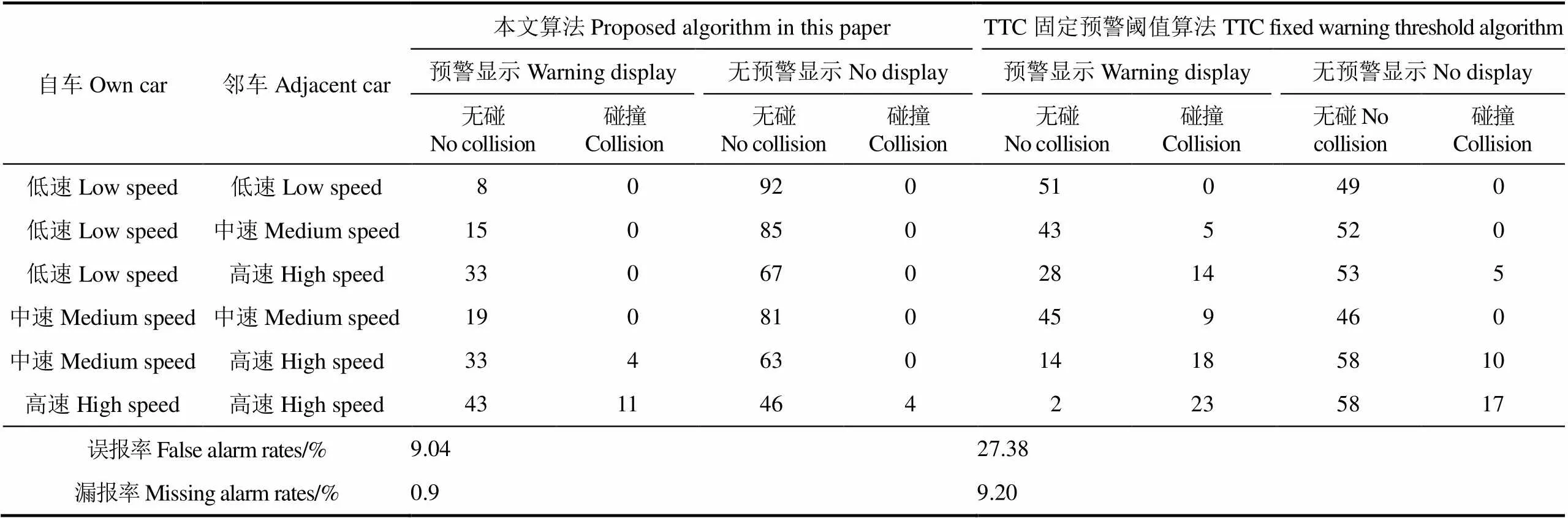
表2 本文方法与TTC固定预警阈值算法仿真结果
由表2可看出,对于TTC预警阈值固定的算法在预警显示情况下,两车都为低速行驶,可以有效进行车辆避撞。其他行驶情况在预警及制动后出现部分碰撞情况,而且车速越高,误警次数就越多。原因是TTC固定阈值算法为提示与警告两级预警,危险提示区间是3~5 s,3 s以下的警告为最晚制动时机,仿真试验设定制动在3~5 s之间会出现制动不及时的状况。对于无预警显示存在碰撞漏报情况,原因是车辆在84~90 km/h区间内行驶无预警提示从而发生碰撞。
由表2对比可以看出,当车辆低速行驶时,本文算法的预警显示次数比TTC预警阈值固定算法要少很多;当车速较高时候,本文算法预警显示次数比TTC预警阈值固定算法又多一些,但是预警效果明显本文方法性能更好。由此可以看出,本文算法减少了车辆低速时候的无谓预警,同时又增加了车辆高速时候的有效预警。根据表2统计的数据对两种算法的性能进行比较。
误报率公式为
(16)
对比一般TTC预警阈值固定方法,本文方法误报率降低至9.04%,误报率降了18.34个百分点;漏报率降8.3个百分点,故本文方法可以更好地进行车辆防撞预警,算法准确率更高。
3.2 实车试验
实车试验选择上海某车辆少且空旷的十字交叉路口为中心的路段,两车分别放置车载设备,进行安装和配置,可获取车辆的状态信息。依据现实条件,试验路面为干燥沥青路,可满足车辆在一般道路上的行驶速度要求。试验应用设备为安卓设备,通过在应用上对采集的车辆状态信息进行安全防撞算法处理,若存在危险则通过语言提示驾驶员。
由于现实条件无法实现车辆相撞,故本文实车试验采用的试验方法重点在于通过统计预警的准确率测试防撞预警算法性能的好坏。实车试验分6组,每组两辆车分别为自车和他车,分别以低、中、高速规定的速度区间内正常行驶,每组速度下重复9次。为保证试验安全,本次实车试验的主要观测内容为:在驾驶员自我观察存在危险并采取制动措施的情况下,判断本文预警信息显示是发生在此制动之前还是之后。驾驶员制动时刻的前后1 s内显示的预警为制动中的预警,其他时刻则分为制动前与制动后的预警。预警系统服务于驾驶员,所以预警时机是驾驶员进行判断的,预警性能的好坏也由驾驶员判定。
每组试验包含直线碰撞和侧面碰撞的情形,统计不同方法下的驾驶员行驶车辆时预警显示处于采取制动措施的时间点位置。不同算法在相同条件下进行实车试验观测预警时机结果如表3所示。
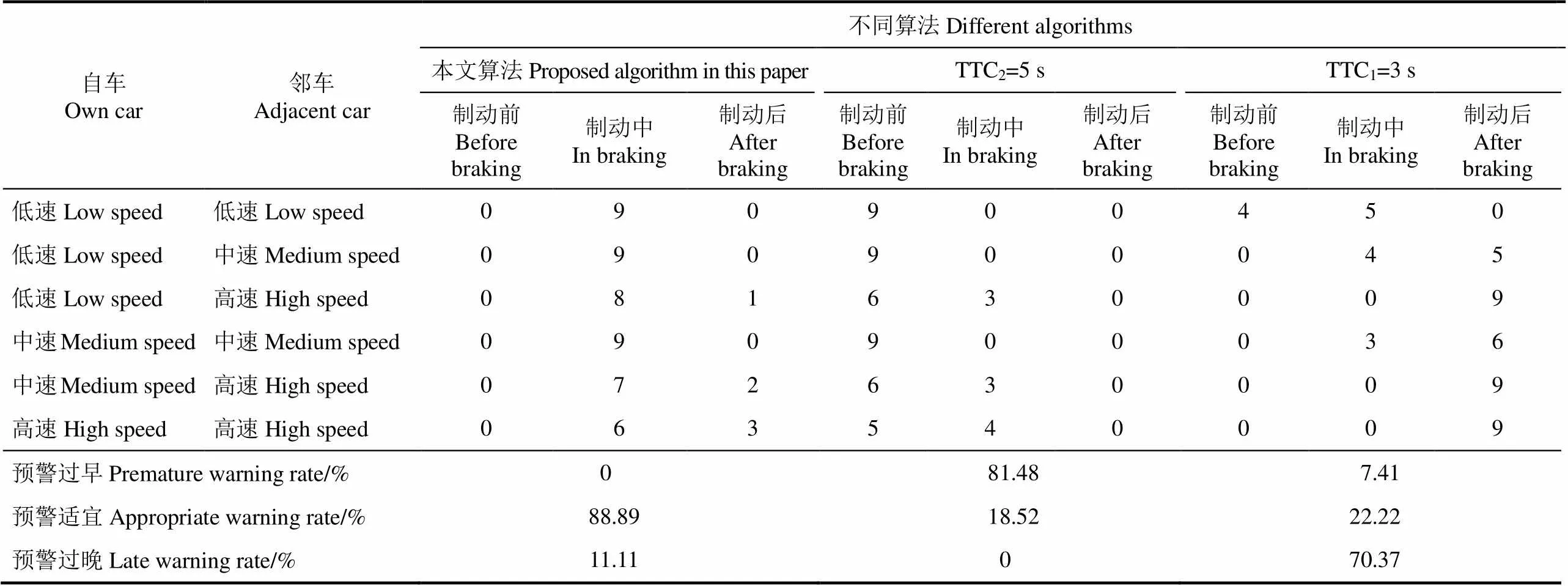
表3 本文方法与TTC固定阈值算法的预警时机实车试验结果
表3为各预警算法的预警情况统计,本文预警方法,两车行驶车速为中速以下时,基本上满足驾驶员碰撞危险预警需求;其中至少一辆车高速行驶时,出现少量的预警过晚的情形,原因可能是过快的车速致使驾驶员保守的过早采取制动措施。
TTC固定阈值算法,当两车低速行驶,危险提示预警过早,危险警告也存在过早情形;对于一车低速和另一车中速或者两车都为中速行驶,危险提示过早,出现危险警告预警过晚情形;其中至少一辆车高速行驶时,危险警告预警过晚,危险提示存在过早的情形。一般的TTC算法是两级固定阈值预警,如果驾驶员根据此方法进行采取避险措施,低速行驶容易对危险提示失去信任,高速行驶易对危险警告失去信任。统计不同方法在驾驶员采取制动时预警时机的性能比较。可以看出TTC阈值固定算法预警,危险提示预警过早达81.48%,危险警告预警过晚达70.37%,而本文方法预警时机适宜高达88.89%,更符合实际车辆防撞预警。
4 结 论
本文算法依据车辆的不同行驶速度设定相应的安全防撞时间,通过车辆发生碰撞需要的时间与安全防撞时间进行比较,存在碰撞危险则通过应用设备语言提示驾驶员。本文在TTC(time to collision)的基础上提出了基于车速的安全预警时间阈值,并进行仿真验证算法效果。算法包括高斯平面坐标系建立、车辆碰撞分类、车辆防碰撞算法处理以及安全预警时间阈值的选择。最后通过搭建仿真平台,验证本文提出的方法提升了预警效率和准确度。试验结果表明,本文提出的基于车速确定安全防撞时间方法与一般固定阈值的TTC相比,本文方法的误报率降了18.34个百分点,预警时机适宜率达88.89%,故本文方法可以更好的进行车辆防撞预警,算法准确率更高。
[1] 杜吉祥. 汽车碰撞事故的计算机模拟再现技术的研究[D].合肥:合肥工业大学,2002.
Du Jixiang. Research on Computer Simulation Ttechnology of Aautomobile Collision Aaccidents [D]. Hefei: HeFei University of Technology, 2002. (in Chinese with English abstract)
[2] 于广鹏,谭德荣,马福霞. 汽车防碰撞预警/碰撞算法研究现状及分析[J]. 山东理工大学学报:自然科学版,2014(6):1-5. Yu Guangpeng, Tan Derong, Ma Fuxia. Analysis and research of issues related to automotive anti-collision system warning/collision algorithm[J]. Journal of Shandong University of Technology: Natural Science Edition, 2014(6): 1-5. (in Chinese with English abstract)
[3] Yoshida H, Awano S, Nagai M, et al. Target following brake control for collision avoidance assist of active interface vehicle[C]//International Joint International on Sice-Icase, 2006: 4436-4439.
[4] 于广鹏,谭德荣,田厚杰,等. 基于纵向避撞时间的预警/制动算法[J]. 河南科技大学学报:自然科学版,2015(2):30-34. Yu Guangpeng, Tan Derong, Tian Houjie, et al. The warning/braking algorithm based on longitudinal collision avoidance time[J]. Journal of Henan University of Science & Technology: Natural Science, 2015(2): 30-34. (in Chinese with English abstract)
[5] 商强,谭德荣,高松,等. 基于驾驶倾向性辨识的避撞-报警算法[J]. 科学技术与工程,2014,14(13):282-285. Shang Qiang, Tan Derong, Gao Song, et al. Collision avoidance-warning algorithm based on identification of driving tendency[J]. Science Technology and Engineering, 2014, 14(13): 282-285. (in Chinese with English abstract)
[6] Lee K, Peng H. Evaluation of automotive forward collision warning and collision avoidance algorithms[J]. Vehicle System Dynamics,2005, 43(10): 735-751.
[7] Benamar F Z, Fkihi S E, Demonceaux C, et al. Estimation of time card of collision (TTC) based on the optical flot in para-cadioptric vision[J].Traitement Du Signal, 2014, 31(1/2): 197-219.
[8] 裴晓飞,刘昭度,马国成,等. 汽车主动避撞系统的安全距离模型和目标检测算法[J]. 汽车安全与节能学报,2012,3(1):26-33. Pei Xiaofei, Liu Zhaodu, Ma Guocheng, et al. Safe distance model and obstacle detection algorithms for a collision warning and collision avoidance system[J]. Journal of Automotive Safety and Energy, 2012, 3(1): 26-33. (in Chinese with English abstract)
[9] 王建强,迟瑞娟,张磊,等. 适应驾驶员特性的汽车追尾报警-避撞算法研究[J]. 公路交通科技,2009(增刊1):7-12. Wang Jianqiang, Chi Ruijuan, Zhang Lei, et al. Study on forward collision warning-avoidance algorithm based on driver characteristics adaptation[J]. Journal of Highway and Transportation Research and Development, 2009(Supp.1): 7-12. (in Chinese with English abstract)
[10] 张瑞锋. 基于自然驾驶数据及主被动试验方法的人车安全行为研究[D]. 长沙:湖南大学,2016.
Zhang Ruifeng. Research of Human-Vehicle Safety Behavior Based on Naturalistic Driving Data and Active-Passive Test[D]. Changsha: Hunan University, 2016. (in Chinese with English abstract)
[11] 姚建卫,李冰,马国元. 浅谈独立坐标系的建立[J]. 科技创新与生产力,2010(3):94-95. Yao Jianwei, Li Bing, Ma Guoyuan. The establish-ment of independent coordinate system[J]. Sci-tech Innovation and Productivity, 2010(3): 94-95. (in Chinese with Englishabstract)
[12] 姜楠. 坐标转换算法研究与软件实现[D].淮南:安徽理工大学,2013.Jiang Nan. Research of Coordinate Transformation Algorithmand Software Implementation[D]. Huainan: AnHui University of Science and Technology. 2013. (in Chinese with English abstract)
[13] 兰琛. 车联网专用短程通信和定位技术的研究与应用[D]. 杭州:浙江大学,2014. Lan Chen. Research and Application of Dedicated Short Range Communication and Positioning Technology in Internet of Vehicles[D]. Hangzhou: Zhejiang University, 2014. (in Chinese with English abstract)
[14] 王晓东. 基于场景建模的辅助驾驶模糊控制方法研究[D].上海:上海交通大学,2013. Wang Xiaodong. Research of Fuzzy Control for Driving Assistant System Based on Scence Modeling[D]. Shanghai: Shanghai Jiaotong University, 2013. (in Chinese with English abstract)
[15] 袁朝春,李道宇,吴飞,等. 汽车纵向主动避撞DRV安全距离模型建模研究[J]. 重庆理工大学学报:自然科学,2015,29(10):29-33. Yuan Chaochun, Li Daoyu, Wu Fei, et al. Analysis on safety distance model and modeling DRV safety distance model[J]. Journal of Chongqing Institute of Technology: Natural Science, 2015, 29(10): 29-33. (in Chinese with English abstract)
[16] 王畅,付锐,张琼,等. 换道预警系统中参数TTC特性研究[J]. 中国公路学报,2015 (8): 91-100,108. Wang Chang, Fu Rui, Zhang Qiong, et al. Research on parameter TTC characteristics of lane change waring system[J]. Chinese Journal of Highway Engineering, 2015,(8): 91-100, 108. (in Chinese with English abstract)
[17] 陈瑜,张铁民,孙道宗,等. 基于无线传感器网络的设施农业车辆定位系统设计与试验[J]. 农业工程学报,2015,(10):190-197.
Chen Yu, Zhang Tiemin, Sun Daozong, et al. Design and experiment of locating system for facilities agricultural vehicle based on wireless sensor network[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2015,(10):190-197. (in Chinese with English abstract)
[18] 王雪. GPS与北斗卫星导航系统异同分析[J]. 科技创新导报,2013(9):136 Wang Xue. Analysis of similarities and differences between GPS and Beidou satellite navigation system[J]. Science and Technology Innovation Herald, 2013(9): 136. (in Chinese with English abstract)
[19] 赵汝祺,赵祚喜,赵汝准. 基于多项式卡尔曼滤波器的车辆定位试验[J]. 农业工程学报, 2012, 28(18): 49-56. Zhao Ruqi, Zhao Zuoxi, Zhao Ruzhun. Experiment of vehicle localization based on polynomial Kalman filter[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2012, 28(18): 49-56. (in Chinese with English abstract)
[20] 杜利,彭涛. 我国北斗产业链发展现状与趋势[J]. 中国工业评论,2015(11):70-76.
[21] 王秋敏,熊启生. GPS RTK测量技术与误差特性[J]. 民营科技,2013(6):70-70. Wang Qiumin, Xiong Qisheng. GPS RTK closed loop measurement technology and error characteristics of [J]. private science and technology, 2013(6): 70-70. (in Chinese with English abstract)
[22] Mahler S P, Reece J L. Global postioning systems, inertial navigation, and integration[M]. Wiley, 2007, 34(5): 365-370.
[23] 张建阳. 基于嵌入式LINUX的GPS/SINS车载组合导航系 统研究与实现[D]. 西安:长安大学,2013. Zhang Jianyang. Research and Implementation of GPS/SINS Based on Vehicle Integrated Navigation System Based on Embedded[D]. Xi'an: Chang'an University, 2013. (in Chinese with English abstract)
[24] 周卢. 专用短程通信(DSRC)协议研究及应用[D]. 重庆:重庆邮电大学, 2013. Zhou Lu. Research and Application of Dedicated Short Range Communication (DSRC) Protocol[D]. Chongqing: Chongqing University of Posts and Telecommunications, 2013. (in Chinese with English abstract)
[25] Yin X, Ma X, K S. Trivedi. MAC and application level performance evaluation of beacon message dissemination in DSRC safety communication[J]. Performance Evaluation, 2014, 71(1): 1-24.
[26] Nwizege K S, Bottero M, Mmeah S, et al. Vehicles- to-infrastructure communication safety messaging in DSRC[J]. Procedia Computer Science, 2014, 34: 559-564.
[27] 张书侨. DSRC无线通信模式的原理及应用[J]. 数字通信世界,2014(9):43-45. Zhang Shuqiao. The principle and application of DSRC wireless communication mode[J]. Digital communication World, 2014(9): 43-45. (in Chinese with English abstract)
[28] 钱立军,邱利宏,林如宁,等. 基于V2X的混合动力汽车分层能量管理及优化[J]. 农业工程学报,2016,32(19):74-81.
Qian Lijun, Qiu Lihong, Lin Runing, Xin Fulong. Hierarchical energy management and optimization of hybrid electric vehicles based on V2X[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2016,32(19):74-81. (in Chinese with English abstract)
[29] Chena L, Tsengb Y, Syue K. Surveillance on-the-road: Vehicular tracking and reporting by V2V communications[J]. Computer Networks, 2014, 67(10): 154-163.
[30] Zou Y. Research on optimization of signal phase at
intersection based on VISSIM simulation software[C]// International Industrial Informatics and Computer Engineering Conference, 2015.
[31] 李飞燕,车广侠,于慧玲. 基于Vissim的交叉口左转待转区设置仿真研究[J]. 黑龙江交通科技,2016,39(3):142-143. Li Feiyan, Che Guangxia, Yu Huiling. Simulation study on left turn waiting area of intersection based on [J]. Heilongjiang Traffic Science and Technology, 2016, 39(3): 142-143. (in Chinese with English abstract)
[32] 李苗苗,王玉娜,孙叶. 基于Vissim仿真的城市交叉口信号配时优化分析[J]. 洛阳理工学院学报:自然科学版,2016,26(4):22-26. Li Miaomiao, Wang Yuna, Sun Ye. Analysis of signal timing optimization in urban intersection based on vissim simulation [J]. Journal of Luoyang Institute of Science and Technology (Natural Science Edition), 2016, 26(4): 22-26. (in Chinese with English abstract)
[33] 周嗣恩,李克平,孙剑,等. 道路交叉口冲突仿真分析[J]. 中国安全科学学报,2009,19(5):32-37. Zhou Sien, Li Keping, Sun Jian, et al. Simulation and analysis of road intersection conflict[J]. Chinese Journal of Safety Science, 2009, 19(5): 32-37. (in Chinese with English abstract)
Anti-collision warning time algorithm based on driving speed of vehicle
Liu Qinghua1,2, Qiu Xiulin1, Xie Limeng1, Wang Junhua2, Fang Shouen2※
(1.212013,;2.201804,)
In order to solve the problem that the warning threshold fixation of time-to-collision (TTC) algorithm causes prematurely warning at low speed and warning with a delay at high speed, this paper presents a safety time warning method of anti-collision based on vehicle driving speed. Firstly, vehicles can get the driving status information of themselves and others timely by on-board equipment. On-board equipment can get the information about latitude, longitude, speed and heading angle of the vehicle in real time. Then, according to the driving status information, vehicle coordinates information can be obtained by Gauss plane rectangular coordinate system established. After that, the possible collisions can be classified and processed. In reality, all vehicles are not required to carry out vehicle collision warning, so it can reduce vehicle collision processing and optimize the performance of the algorithm by classifying the possible collisions of vehicles, and it also can facilitate the use of different collision warning algorithms for different types. Mathematical model can be used to classify the possible collisions. Collision is divided into linear collision and side impact, and linear collision includes frontal and rear collision. For linear collision, the precondition of collision is that the lateral distance of the 2 vehicles is less than the width of vehicle. For the side impact, vehicles maintain current speed and direction, and according to the current state of vehicles, it can predict future vehicle running track, determine vehicle collision point and calculate vehicle collision time difference, and the collision time difference is used to determine the initial conditions of side impact. Next, the initial condition of vehicle collision is met, vehicle anti-collision safety time can be set based on vehicle driving speed, and then it will be compared with the time required for vehicle collision occurring for each vehicle. If the risk of collision exists, the application equipment displays warnings to remind drivers. The safety anti-collision time is the shortest time for drivers to take measures to avoid the danger. Response time of the driver is the time when the alarm signal is received, and response time of the braking system includes the reaction time of the braking system, the braking coordination time and the continuous braking time. Based on this, it is possible to get early warning of collision risk from the driver’s reaction to braking reaction. Through the different vehicle speed, it can determine the different safety collision time, and through detecting vehicle speed changes, it can timely change vehicle anti-collision safety time threshold. Entire system can receive the vehicle status information through the on-board equipment in real time and continuously. When the precondition of linear collision and side collision is satisfied, the time needed for vehicle collision is calculated in real time, and then compared with the time threshold of safety warning. If there is a risk of collision, it will warn on the application device. Finally, experiments are carried out to verify the performance of the proposed method. In the simulation experiment, compared with the general TTC fixed threshold method, this method reduces the false alarm rate by up to 9.04%, and decreases the missing alarm rate by 8.3%. In real vehicle test, experimental results show that the suitable early warning rate of this proposed method is 88.89%, and premature warning rate of general TTC fixed threshold method reached 81.48%, and late warning rate reached 70.37%. It can be concluded that the proposed method in this paper is more effective for vehicle hazard warning, more in line with the actual situation of the vehicle anti-collision, and improves the safety of vehicle driving.
vehicles; traffic; safety; collision warning; time to collision
10.11975/j.issn.1002-6819.2017.12.013
U467.14
A
1002-6819(2017)-12-0099-08
2016-12-28
2017-05-31
国家863计划项目(2013AA12A206)
刘庆华,男,同济大学博士后,副教授,工学博士,主要研究方向为智能交通与道路安全。镇江 江苏科技大学计算机科学与工程学院,212013。Email:giant_liu@163.com
方守恩,男,教授,博士生导师,主要研究向为道路交通安全、道路规划与计算机辅助设计等。上海 同济大学交通运输工程学院,201804。Email:fangsek@tongji.edu.cn
刘庆华,邱修林,谢礼猛,王骏骅,方守恩. 基于行驶车速的车辆防撞时间预警算法[J]. 农业工程学报,2017,33(12):99-106. doi:10.11975/j.issn.1002-6819.2017.12.013 http://www.tcsae.org
Liu Qinghua, Qiu Xiulin, Xie Limeng, Wang Junhua, Fang Shouen. Anti-collision warning time algorithm based on driving speed of vehicle[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(12): 99-106. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2017.12.013 http://www.tcsae.org