基于电子油门的四轮独立驱动电动车的研究
2017-07-14王高平程源文顾士伦余李扬薛文韬
王高平+程源文+顾士伦+余李扬+薛文韬

摘要:该系统以采用电子油门控制,以自主设计的四轮独立驱动电动车为研究对象,给出了四轮独立驱动电动车的控制方案,以阿克曼转向模型为基础,对四轮独立驱动电动车的运动状态和转向角度进行分析,并结合实际测量数据对转向时各轮的转速进行分析,给出了车速和转角对各轮转速影响的变化趋势,为四轮独立驱动电子差速控制提供了理论依据。
关键词:电子油门;无刷直流电机;四轮独立驱动
中图分类号:TP393 文献标识码:A 文章编号:1009-3044(2017)17-0242-02
1前沿
四轮独立驱动电动汽车采用轮毂电机,各驱动轮可进行独立控制,简化了车身结构的复杂性,实现了能源最大利用。并具有灵活的行驶特性,能提高整车性能。采用电子油门,简化了控制结构,使控制多樣化,个性化,智能化。
2设计思想
2.1系统总体控制
如图1所示,四轮独立驱动电动汽车采用MC9SXS128作为控制的CPU,主控CPU采集油门深度、刹车深度和方向盘的转向角,依据阿克曼转向模型,主控CPU对数据进行滤波、优化以及计算出电动汽车的四个轮子的速度,通过CAN总线将计算出的速度发送至辅控CPU中,辅控CPU给驱动板发送PWM波驱动电机转动,并实时检测车轮转速,实现闭环控制。
通过CAN总线,四轮驱动电动车中央控制器将各个车轮的速度等设定值传送给各个车轮的控制器。同时,各个车轮的控制器以及各电机控制器将实际转速等信息通过CAN总线反馈给中央控制器。
2.2阿克曼转向模型
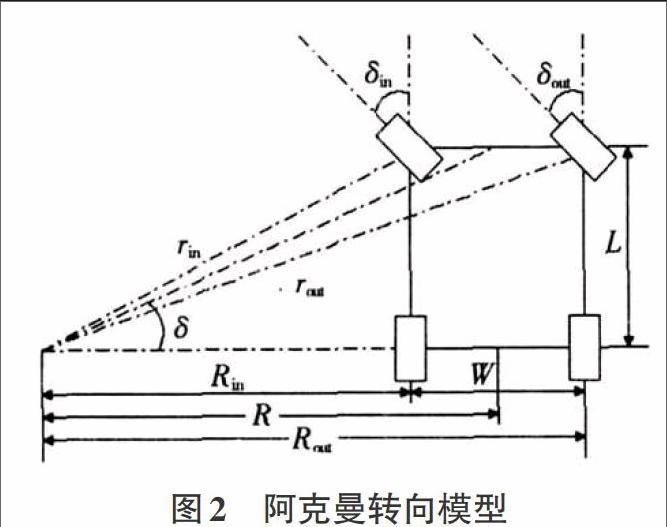
图2为阿克曼转向模型,汽车在直线行驶或转弯行驶时,每个车轮的运动轨迹都要符合它的自然运动轨迹,在转弯时使四个车轮的路径圆心交汇于后轴延长线上瞬时转向中心,所有车轮都在同一转向中心以至于在转弯时不会发生侧滑现象,从而使车轮与地面处于纯滚动而无滑移现象。
转向特性分析:直线行驶时,四个轮子的轴线都相互平行,而且垂直与汽车纵向轴心面。汽车在转向行驶时,四个车轮的路径圆心交汇于后轴延长线上瞬时转向中心。
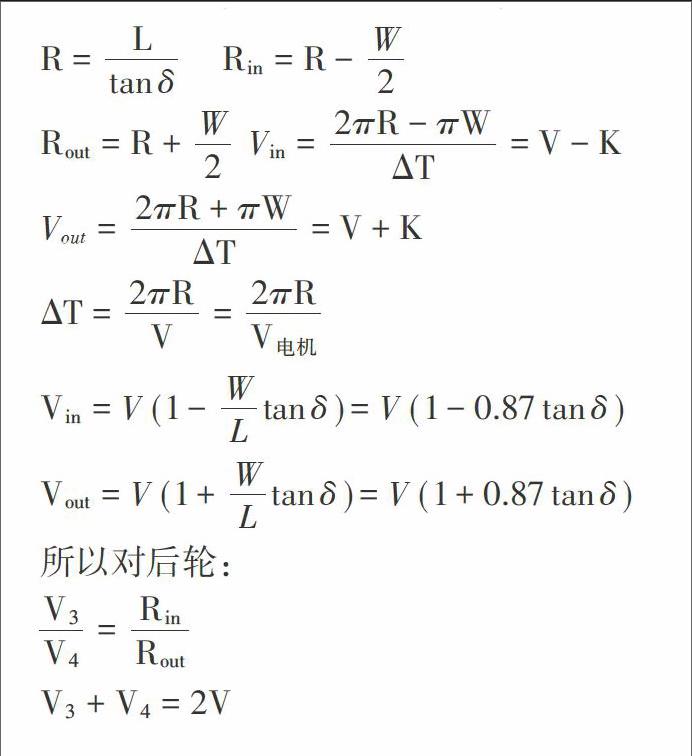
运动分析:以目前开发的四轮独立驱动电动车为例,车身长度L=1.365m,车身宽度W=1.19m。设前内轮转速为Vin,前外轮转速为Vout,后内轮转速为V3,后外轮转速为V4。
2.3转向角度分析
实验用车采用纯机械式的转向系统。汽车机械转向系统的构成原理如图3所示。
2.3.1分析过程
车体(实验用车)结构特性简述:转向节臂(8)与车轮方向平行,且转向节臂与车架连接点在转向过程中不会相对于车身前后移动;转向摇臂(6)与车的运行方向垂直(即与车身方向垂直)。所以在车的正常运行过程中转向节臂(8)与车架连接点与转向摇臂(6)所在直线的距离是定值A(10.5cm)。
其他参数:转向节臂(8)的长度B(8.5cm),转向时转向摇臂(6)相对于零点(车直行时转向摇臂的位置)的距离C(单片机检测),转向直拉杆(7)的长度D(27.5cm),转向节臂和车架连接点与原点所在中心线的距离也为定值Z(26.5cm)。
2.4分析图解
1)直行转向系统直行俯视简图如图4:
2)左转转向系统左转俯视简图如图5:
3测试分析
对前内轮的转速Vin进行测试:转角变化为2、4、6…70度,准备转向时的车速为10、20、30…90km/h得到的Vin变化曲线为图7所示。
从下到上依次为车速V为10、20、30、…、90km/h对应的曲线,从图中可以看到转角在大于49。的时候车轮转速为负,也就是轮毂电机开始反转。从三维图8可以更详细的观察到车速和转角对转向时Vin的影响。0~100坐标轴是车速,0~1.4坐标轴是转角弧度观察前外轮的速度变化曲线:随着转角和速度的增大Vout越来越大,转角越大上升越快。
同理测试V3和V4的变化曲线,前内轮V3当转向角大于66.5°时轮毂电机才开始反转。对比Vin和Vout,转向时后轮和前轮有相同的变化趋势,但V3和V4的变化幅度要小一些。
4结论
四轮驱动对比传统机械转向系统有着很大的优势,四轮独立驱动电动汽车将车辆转向系统从传统机械转向体系中解放出来,形成一种全线控的四轮可独立驱/制动/转向的先进车辆。它具有更多的可控自由度,可以完成传统汽车无法完成的原地转向、斜行和横向移动等特殊功能,极大地提升了汽车的机动性能。不仅如此,还可以通过对整车动力学集成控制系统的设计,可以完成车轮转向、驱动、制动的协调控制,从而可以保证车辆每个轮胎具有最大附着度,提高整车的操纵稳定性。
