一种基于测距定位的多维水下可见光通信传感网
2017-07-14项彤黄鸿基周行洲张雨吴浩
项彤+黄鸿基+周行洲+张雨+吴浩


摘 要:本文提出了一种基于测距定位的多维水下可见光通信传感网。该系统包括:锚节点、网络接入模块、网络信号处理模块、可见光通信收发一体机A和B、电信号处理模块、本地处理和显示模块、云端服务器模块以及数据库。网络信号接入后经模数转换加载到蓝光LED上,通过可见光信道到接收端,再经光电转换器加载到信号处理芯片,终端识别后以同样方式传送给网络。同时,云端服务器模块将本地处理和显示模块分析的误比特率、经测距算法得出的水下位置信息等实时上传至数据库。系统通过信道变化引起相应参数变化来实现传感。此外,节点构成多维传感网,可实现可靠的水下数据传输,并通过节点掌握水下位置信息,可实现精确定位,且鲁棒性较好。
关键词:通信;多維传感网;定位算法
中图分类号:TN929.1 文献标识码:A
0.引言
可见光通信(Visible Light Communications, VLC)是基于发光二极管(Light Emitting Diode,LED)等技术上发展起来的一种新型、短距离、高速的无线通信技术。全双工通信是在通信设备的上行链路和下行链路同时进行数据和信令的传输。
目前,国内外也已经开展了无线光通信技术的相关研究。2015年11月,爱沙尼亚Velmenni公司在塔林演示了一种Li-Fi原型灯泡,其数据传输速度可以达到1Gbps;在实验室特定条件下,记录的Li-Fi灯泡的数据传输速率达到224Gbps。2016年12月的Globecom会议上,Ki-Hong Park 等分析了室内可见光MIMO系统的可靠性。2017年,Yahya Mohammed Al-Moliki的研究组研究了室内可见光通信的物理层安全策略。同年2月,孙洪伟等提出了实现智能手机可见光定位功能的方案。同时,中国科学院的丁昆等开发了一款便携式光天线设备。但据我们所知,国内外尚未出现与多维传感网可见光通信系统的研究。
基于可见光通信系统,结合多维传感和定位技术,我们提出了一种全双工通信系统。与之前的通信系统相比,本系统可实现更高的定位精度,同时提高频谱利用率。
1.基本模型
首先,在信道环境良好的情况下,构建可以进行数据传输的可见光通信系统;然后,在信道环境遭到破坏时,观察网络信号的通断,从而实现传感功能。
具体地,本文所述的智能可见光通信系统如图1所示,包括网络接入模块、网络信号处理模块、可见光通信收发一体机A和B、电信号处理模块、本地处理和显示模块、云端服务器模块以及封装相关部件。网络接入模块将网络信号接入到本系统;网络信号处理模块负责将网络信号进行处理,转换成数字信号;可见光发射机进行电光转换,将数字电信号转换成可见光信号,然后光强信号通过发光二极管(Light-Emitting diode, LED)发射出去;可见光信道为无线信道。在信道良好的自由空间环境下,信道增益h可以表示为
云端服务器模块用来将误比特率等结果实时上传到云端服务器模块,便于存储和实时访问。在信道环境良好的情况下,根据上述构建的可见光通信系统,可以在式(4)所示误比特率条件下,进行可靠的数据传输。
2.多维传感定位算法
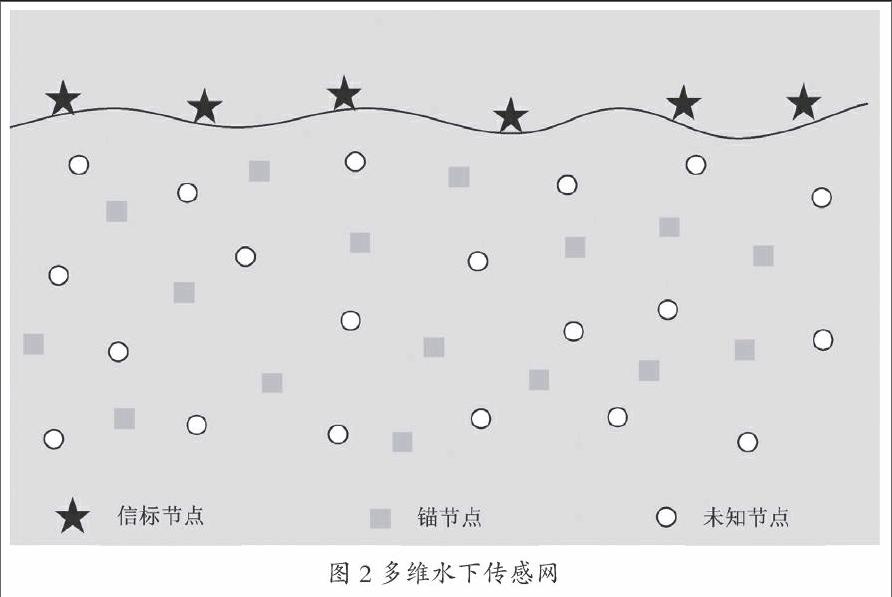
多维传感网的精确定位是一个很重要的研究领域。如图2所示,在多维水下传感网中,定义一个所述系统为一个节点,在布防水域内投放多个节点。当水下可见光信道发生变化时,相应指标参数会发生明显的变化,如误比特率升高,网速下降。每个节点获取的信息经本地处理和显示模块分析后会实时传送到数据库及云端服务器模块,以实现对布防水域的侦查与监控。
监测水域内的节点分为信标节点、锚节点和未知节点这3种,整个定位过程分为两部分:锚节点定位和未知节点定位。定义每个节点的定位周期为T1。信标节点需部署四个以上且配备GPS,通过声波信号与锚节点直接联系。锚节点收集至少3个以上信标节点位置信息,利用三边测量法来计算锚节点的位置信息。其未知节点的定位算法基本步骤如下:
(1)定义未知节点只和它本地的一跳邻居节点进行联系,通过和锚节点的本地消息传递来进行自我定位。
(2)计算未知节点与锚节点的最小跳数。锚节点通过信标节点得到自己的位置信息后,广播其分组信息。跳数字段初始化为0,逐跳加1。广播过程中,锚节点也要记录自己到其他锚节点的最小跳数,未知节点记录到每个锚节点的最小跳数,若收到来自同一节点的相同数据包或跳数字段较大的数据包,则舍弃。
(3)计算未知节点到锚节点的距离。先计算锚节点的平均每跳距离D,每个锚节点将得到的D广播分组给整个网络。未知节点利用得到的D乘以未知节点j到锚节点i的跳数Nij即可得到未知节点j到锚节点i的距离Dij:
3.实验和仿真
我们定义100个节点随机分布在100*100m的范围,其中锚节点的占比可调,所有节点在R=50m的范围内可实现通信。为了消除结果分布的偶然性影响,在相同的条件下仿真了80次并取其平均值。
同时,设定锚节点比例为30%,使节点总数从60变化到150再次进行仿真,测试在锚节点比例一定的情况下节点总数改变对该算法定位性能的影响。从图5可以看出,随着节点总数的增加,归一化定位误差逐渐降低。进一步观察可以发现,当节点总数达到80时曲线趋于平缓,即本算法的性能趋于稳定。本算法的定位误差比传统的水下传感网定位算法降低了4.3%~11.2%左右。从图3可以看出,本算法各个节点误差分布较为均匀,即本算法公平性和均衡性较好。
结论
在本文中,我们提出了一种基于测距定位的多维水下可见光通信传感网。与现有技术相比,它采用蓝绿光光源进行通信,具备水下蓝绿激光通信高速、大容量数据传输的优点,弥补了水声通信速率慢、时延大的不足。同时,该系统将可见光通信技术与传感器技术相结合,实时采集水下目标位置信息,实现对布防水域的实时监控。与之前的研究相比,本系统现有的定位算法具有较高的定位精度,且鲁棒性较好。
参考文献
[1]http://www.elecfans.com/led/lednews/401783.html?1454321221.
[2]K. H. Park and M. S. Alouini, “Optimization of an Angle-Aided Mirror Diversity Receiver for Indoor MIMO-VLC Systems,” 2016 IEEE Global Communications Conference (GLOBECOM), Washington, DC, 2016, pp. 1-6.
[3]Y. M. Al-Moliki, M. T. Alresheedi and Y. Al-Harthi, “Secret Key Generation Protocol for Optical OFDM Systems in Indoor VLC Networks,” in IEEE Photonics Journal, vol. 9, no. 2, pp. 1-15, April 2017.doi: 10.1109/JPHOT.2017.2667400
[4]孙洪伟,王旭东,吴楠.一种基于智能手机的可见光室内信标定位方法[J].光通信研究,2017(1):72-75.
[5]丁昆,张涛,郑伟波.基于可见光通信技术的便携式光天线设备[J]. 光通信研究,2017(1):76-78.
