基于模糊PID控制器的叶菜温室测控系统设计
2017-07-12盛平朱庆夫
盛平+朱庆夫

摘要:温室环境是一个复杂多变的被控对象,无法建立准确的数学模型。江浙地区四季气候变化明显,而现有的控制系统控制模式固定,难以取得理想的控制效果。通过对叶菜生长环境的研究,设计了基于模糊PID控制器的叶菜温室测控系统,用于实现对叶菜温室环境的自动调节。该控制器运用模糊推理对PID控制器的3个参数进行调整,提高了系统的自适应性能。试验结果表明:系统性能稳定、响应时间短、超调小,达到了预期控制效果。
关键词:温室环境;模糊算法;PID控制器;自适应
DOIDOI:10.11907/rjdk.171197
中图分类号:TP319
文献标识码:A 文章编号:1672-7800(2017)006-0100-04
0 引言
随着计算机和网络技术的快速发展,温室环境的控制正在向智能化、自动化的方向迈进,利用物联网技术对温室环境进行有效调控可以改善农业生态,提高农作物质量和产量。但温室环境是一个多变量、强耦合、大滞后且时变的被控对象[1],且江浙地区四季气候变化明显,夏季炎热湿润,冬季寒冷干燥,昼夜温差及湿度差较大,常规控制方法难以取得理想效果,而现有控制系统控制模式固定,不能适应环境变化,因此建立一套适应性强、响应快、稳定性好的智能温室测控系统是现代精细农业的迫切需求。
目前,已有的控制方案中采用传统PID控制来实现,但PID参数恒定,无法适应非线性系统的控制需求。因此,本文将模糊理论与PID控制相结合,运用模糊推理对PID控制器的3个参数进行调整,提高了系统的自适应性和灵活性,改善了系统动态性能。
1 模糊PID控制器原理
1.1 模糊控制原理
在传统控制领域里,对系统的动态信息描述越精确,控制效果越好,然而对于复杂系统,由于变量太多,往往无法精确表示系统的动态信息,这时可以考虑使用模糊控制来解决。模糊控制是一种非线性控制方法,其不依赖于被控对象的精确数学模型,而是通过大量的实际操作数据及专家经验总结出控制规则,用自然语言描述控制策略,模拟人对事物的决策实现对系统的控制。温室环境复杂多变且干扰因子众多,常规方法难以取得理想的控制效果,所以使用模糊控制实现对温室环境的调控比较合适。
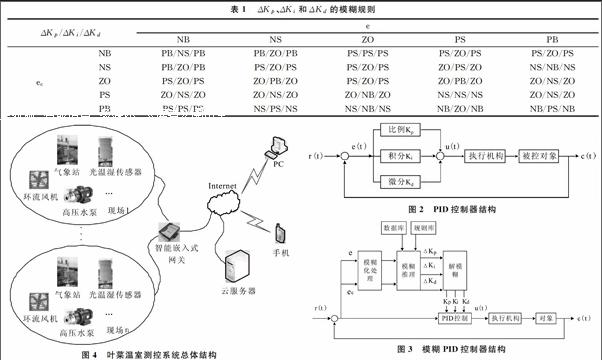
在模糊控制系统中,模糊控制器设计是其核心部分,控制器结构如图1所示,主要由4个部分构成:模糊化处理、规则库、模糊推理及解模糊[2]。
1.2 PID控制器原理
在工程实际中,PID控制因其简单、可靠性高及鲁棒性好等特点被广泛应用于工业及设施农业的过程控制中,并取得较理想的控制效果。所谓PID控制即:比例(P)-积分(I)-微分(D)控制[3],结构图如图2所示,其控制算式如下:
u(t)=Kp[e(t)+1/Ki∫t0e(t)dt+Kd*de(t)/dt](1)
式(1)中,Kp、Ki和Kd分别为比例、积分和微分系数,e(t) = r(t) - c(t),r(t)为设定值,c(t)为实际测量值,e(t)为控制器的输入,它是设定值与实际测量值的偏差,u(t)为控制器输出。PID控制器中Kp、Ki和Kd的调节会对系统的动静态性能产生较大影响,3个参数的作用具体如下:(1)比例控制Kp:使系统反应灵敏,可以迅速调节系统误差;(2)积分控制Ki:系统在进入稳态后存在稳态误差,Ki用来消除稳态误差;(3)微分控制Kd:提前预测系统误差变化的趋势,使误差提前为零,Kd是一种超前调节。
2 温室测控系统分析与设计
2.1 叶菜温室环境因子分析
叶菜温室环境包含因子众多,包括环境温度、光照强度、空气湿度、CO2浓度、土壤水分和肥力等,这些环境因子在温室环境中相互联系、相互耦合,一同作用于温室这个小气候环境[4]。各个因子对叶菜生长的影响及调控如下:
2.1.1 温度
环境温度是影响叶菜干物质分配及叶片生长最重要的环境因子。若环境温度偏低会导致叶菜生长缓慢甚至停滞,长时间低温更容易引起低温危害。若温度偏高会导致呼吸消耗增加,叶菜植株积累的干物质减少,所富含的能量减少。对温室内温度的调控主要包括:升溫控制及降温控制。
(1)升温控制。当对温室进行升温控制时,首先关闭天窗及侧窗,然后开启内保温膜和内循环促进温室内空气的流通,之后开启暖气、空调等设备进行升温。
(2)降温控制。温室温度调控中常用的降温措施有:自然通风(侧窗和天窗等)、人工强制通风(排风机)、开启遮阳网(内遮阳和外遮阳)、湿帘冷风机降温等。
2.1.2 湿度
空气相对湿度对叶菜生长的蒸腾作用有较大影响。若空气湿度过高,叶菜根部呼吸困难,不仅影响正常生长发育,而且容易诱发病害;若空气湿度过低,土壤湿度也会随之降低,可能会导致作物缺水而出现萎蔫现象。对于叶菜而言,长期处于空气湿度较低的环境中生长时,容易导致叶菜的叶片小而厚,阻碍了叶菜的生长。对湿度的调控包括:加湿和除湿。温室内常用加湿方法有喷雾加湿和湿帘加湿;温室内除湿控制可以采用自然通风或强制通风,在温室内空气含量一定的情况下,也可采用加温除湿来降低温室内的空气湿度。
2.1.3 光照
光照是作物进行光合作用的能量来源,它影响到幼苗的素质、植株的生长和产量高低。光照太强会灼伤作物,光照不足时光合作用会减弱,对温室内光照的控制包括遮光和补光。
其中,遮光控制可以通过开启内外遮阳网来减弱温室内部的光照强度;补光控制在连续阴雨或者光照不足的情况下,为了促进作物生长,可以通过开启补光灯的方式增加温室内的光照强度。
2.1.4 CO2
CO2浓度是作物进行光合作用不可缺少的条件,它直接影响着有机物的合成。CO2浓度的控制可以通过通风换气或者CO2发生器。
此外,环境温湿度在一定条件下是相互耦合的,当温度上升时湿度呈下降趋势,温度下降时湿度呈上升趋势,同时空气湿度变化又会影响环境温度[5],而光照变化也会对温湿度产生影响,如当光照增强时,温度会上升等,所以设计温室测控系统的输出需要考虑环境因素间的耦合作用。
2.2 模糊PID控制器设计
PID控制器在过程控制中被广泛应用,但其参数整定是控制器设计的核心内容。常规的PID控制器使用工程整定方式,参数设定后一般固定不变,对系统运行变化的适应能力、抗干扰能力不足,所以本文采用模糊控制对PID控制器的参数Kp、Ki和Kd进行在线整定[6],使控制器能够及时响应系统环境的实时变化,使系统具有更强的灵活性。
温室测控系统是一个多变量间相互耦合且时变的复杂系统,理论上来说,如果一个模糊控制系统能够做到将所有影响温室内环境指标的因素作为控制器的输入,那么该控制器的输出一定非常准确,但事实上这样做是不现实的,因为将越多的环境变量作为输入,环境因子之间的相互耦合关系就越多,控制系统就越复杂,控制器的规则库就无法定义。从上文对温室环境的分析中可看出,在众多的环境因子中,温度和湿度两大因子对温室环境的影响最为明显,光照其次,其它如CO2等因素的控制相对单一,且耦合作用相对较小。因此,本系统在设计时综合考虑温室内光温湿的测量与调控,其它因子暂不考虑。
模糊PID控制器的结构图如图3所示,在设计系统的输出时,充分考虑湿度和光照的耦合作用进行综合调控。当环境因子的调控发送冲突时,以温度调控为先,湿度其次。
其中,r(t)为温度设定值,c(t)为温度实际测量值,u(t)为PID控制器的输出,为控制温湿度相关执行机构的变量[7],控制器的输入为温度偏差e和偏差变化率ec,控制器可根据系统实际运行情况模糊推理出Kp、Ki和Kd的增量ΔKp、ΔKi和ΔKd。
根据温室测控系统的实际情况,将e、ec、ΔKp、ΔKi和ΔKd的模糊论域划分为5个等级:{NB、NS、ZO、PS、PB},其含义分别为:{负大、负小、零、正小、正大},论域范围为[-4, 4]。两个输入变量e、ec及3个输出变量ΔKp、ΔKi和ΔKd的隶属度函数均为三角形隶属度函数。控制规则采用“if A and B then C”的条件句式,依据模糊推理原则,总结出模糊控制规则表如表1所示。
控制器将系统运行时的温度偏差和偏差变化率进行模糊处理后得到e和ec的模糊度,通过查询模糊规则表得出ΔKp、ΔKi和ΔKd的模糊度,再对照模糊论域将3个参数的模糊度解模糊成具体数值,从而计算出新的Kp、Ki和Kd,最后将计算结果代入PID控制算式,计算出系统输出量,则该输出量即为控制温湿度相关执行机构的变量,由该变量推导出当前的控制组合。
2.3 系统总体结构
根据系统需求,本文所设计的叶菜温室测控系统总体结构图如图4所示。
系统层次结构从左至右可以分为3个部分:①传感器、风机等硬件设备;②嵌入式网关;③上层应用(云服务与温室管理平台)。其中,嵌入式网关为温室测控系统的核心部分,是连接上层软件和底层硬件的中枢[8]。网关通过RS485串口通信采集现场传感器、气象站的实时数据,控制风机、水泵等现场执行设备,对环境数据进行分析过滤之后,首先在本地嵌入式数据库sqlite中存储,之后将数据上传至云服务器存储到sqlserver中。用户也能够通过PC或手机登录温室管理平台进行实时环境数据查询、设备控制、现场实时视频查看及自动运行设定等。
3 系统功能模块设计
3.1 嵌入式模块硬件选择
叶菜温室环境复杂多变,干扰因子众多,尤其夏季很可能长期处于高温高湿的环境之中,而嵌入式网关作为温室测控系统的核心部分,必须选择工业级的产品保证其稳定性和可靠性。
本系统选择基于Linux内核的GT6502嵌入式工业计算机作为嵌入式核心控制模块。该模块CPU采用成熟的高性能工业处理器ARM926EJ,且为了保证能达到工业设备需要的稳定性,整板设计采用全工业布线,在材质上选用高品质的PCB板材,稳定的硬件设计能保证系统长时间正常运行。此外,模块具备多重电源保护,抗静电、过流、防反接等保护能有效保证在野外等恶劣环境下的可靠运行。
3.2 嵌入式模块软件设计
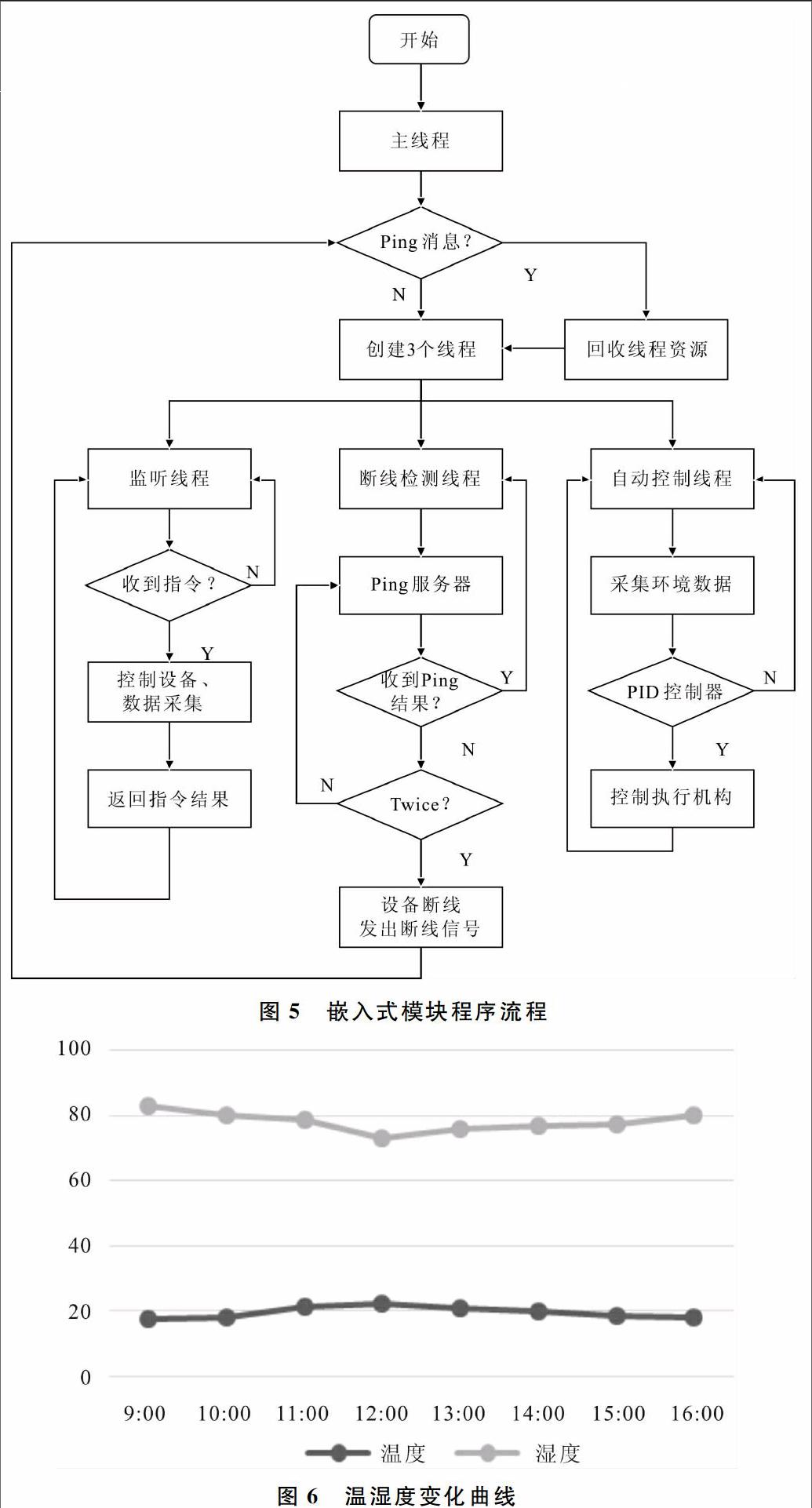
在叶菜温室测控系统中,嵌入式模块软件的主要功能是:①采集实时环境数据,分析过滤后存储;②实时响应用户的数据查询、设备控制等需求;③根据用户设置和当前环境数据进行自动调控温室环境。根据嵌入式模块软件的功能设计,其程序实现流程如图5所示。主线程负责子线程的创建与线程资源的回收,所创建的3个子线程分别为:监听线程、断线检测线程及自动控制线程。
(1)监听线程:接收用户设备控制、实时数据查询、配置信息查询等指令,作出响应后向用户反馈执行结果;
(2)断线检测:检测设备与云服务器的长连接,若检测到当前设备断线,则执行重连操作保证设备一直与服务器保持长连接;
(3)自动控制:收集实时环境数据,分析过滤后存储,并将当前环境数据输入到模糊PID控制器中,根据控制的输出进行温室环境调控。
3.3 服务器模块设计
基于高内聚低耦合的软件设计思想[9],本系统将服务器模块按照功能分为通信服务器与数据服务器。通信服务器负责与嵌入式网关、温室管理平台的通信。当前服务器应用在农业示范基地,考虑到应用场景可能被拓展,用户数及设备数可能会增加,通信实现需能够响应弹性的用户数及并发需求,实现资源自动分配,所以通信服务器是基于Linux下的C++开发,选用多路I/O复用模型epoll实现通信并发,通过创建线程池的方式实现连接的负载均衡。数据服务器负责环境信息的存储和历史数据的查询,使用HTTP协议实现数据查询与响应。两个模块分开设计,独立开发,保证通信服务与数据服务互不影响,模块间的通信使用进程间通信實现。
4 温室测控系统的效果验证与分析
为了验证系统实际运行效果,课题以江苏省农科院六合农业示范基地为试验对象进行测试,选取该示范基地中一个连栋生菜温室为实施地点。该生菜温室包含4个区域,每个区域包含2个光温湿三合一传感器,整个温室内共有8个三合一传感器,且具有侧窗、内外遮阳、环流风机、水泵等多种执行设备,温室内还接入了4个高清网络摄像机便于查看实时视频。温室外安装一个包含光、温、湿、风速、风向、雨量6种传感器的气象站,用于感知室外环境信息。本测试时间为2016年12月12日,选取温室内环境温湿度为测试对象,对9:00-16:00的温湿度调控状况进行测试。由于当前生菜处于莲座期,生长最佳的温度范围为18~22℃,湿度为70%~80%,因此设定温度值为20℃,湿度值为75%。将温湿度设定值输入系统之后启动系统的自动控制,由测试数据生成的变化曲线图如下:
如图6所示,温室内温度变化范围为17.5~22.3℃,湿度为73.2%~83.1%,由数据可见,系统运行正常并且能够根据设定值及时响应,保持温湿度在合理的范围内,达到了预期的控制效果。
5 结语
构建了基于模糊PID控制器的叶菜温室测控系统。通过对叶菜生长环境的研究,利用模糊推理对PID控制器的参数进行调整,提升了系统的动态性能,实现了叶菜温室环境的自动调控。试验表明,系统运行稳定、响应迅速,具有很强的鲁棒性。
参考文献:
[1]王君.基于模糊控制策略的温室远程智能控制系统的研究[D].长春:吉林大学,2015.
[2]兰富军.基于模糊控制与神经网络的智能温室温度控制研究[J].安徽农业科学,2012,40(7):4437-4438.
[3]屈毅,宁铎,赖展翅,等.温室温度控制系统的神经网络PID控制[J].农业工程学报,2011,27(2):307-311.
[4]王立舒,侯涛,姜森.基于改进多目标进化算法的温室环境优化控制[J].农业工程学报,2014,30(5):131-137.
[5]杨小虎.面向温室智能控制的模糊控制算法研究[D].杨凌:西北农林科技大学,2014.
[6]岳文杰,谢守勇,陳种,等.基于模糊PID的温室温度控制器设计与仿真[J].农机化研究,2014,36(4):194-197.
[7]候涛.基于改进多目标进化算法的温室环境PID控制的仿真研究[D].哈尔滨:东北林业大 学,2014.
[8]邰成.智能温室控制算法的研究与应用[D].南京:南京邮电大学,2013.
[9]牛甲.基于模糊控制的温室环境控制系统的研究[D].西安:西安电子科技大学,2013.
(责任编辑:陈福时)
