基于局部增强和阈值分割的芯线彩色图像分割算法
2017-07-12李保忠王晓浩
李保忠, 王晓浩 , 罗 超
(1. 中国工程物理研究院, 四川 绵阳 621900; 2. 清华大学 深圳研究生院, 广东 深圳 518055)
基于局部增强和阈值分割的芯线彩色图像分割算法
李保忠1, 王晓浩2, 罗 超1
(1. 中国工程物理研究院, 四川 绵阳 621900; 2. 清华大学 深圳研究生院, 广东 深圳 518055)
不同颜色芯线的有效识别是制约数据线生产自动化的关键因素之一; 阈值分割是一种简单有效地图像分割算法, 但对于颜色信息较多的情况鲁棒性较差; 基于指数函数的增强图像可以有效地放大和突出感兴趣的图像区域; 本文提出了一种结合局部增强和阈值分割的分割算法, 通过对图像进行局部增强以放大感兴趣灰度区域, 然后再通过阈值分割的方式筛选出目标区域; 该方法能够快速有效地分割出多种颜色区域, 也具有良好的鲁棒性.
图像分割; 色彩空间; 阈值分割; 图像增强
0 引 言
随着电子产品的快速发展, 各种各样的数据线已经成为生活中必不可少的一部分, 每年消耗和生产的数据线以十亿计. 典型的以USB2.0和Type-C线为例, 其中USB数据线由4种颜色的“芯线”组成, 而TYPE-C数据线由12~15种颜色的芯线组成, 如图 1 所示. 在数据线的生产过程中, 通常由人工将各种颜色的线进行分类, 放置到相应的焊接位当中进行焊接. 在这个过程中, 人工排线会造成产品质量不稳定, 焊接则会产生对人体有害的有毒气体, 实现数据线生产的自动化势在必行. 如何实现对各种颜色芯线的有效、 快速识别, 是这个过程实现自动化的难点和重点. 本文从所采集的图像特征入手, 采用指数图像增强以及阈值分割相结合的办法实现了对各个芯线的快速、 稳定识别.
不同颜色芯线识别的过程即彩色图像分割的过程. 彩色图像可以看作是多个通道的灰度图像组合而成, 因此彩色图像的分割过程也就是将色彩空间和灰度图像分割相结合的过程[1]. 图像分割算法可大体分为空间相关算法和空间无关算法两类, 空间相关算法在计算过程中与像素的位置信息相关, 空间无关算法主要根据图像的灰度值进行计算, 计算过程中与像素的位置信息无关[2]. 芯线在生产过程中处于乱序状态, 某种颜色的芯线出现的位置是不固定的, 因此应该选用空间无关的算法, 即基于灰度值进行处理. 在基于灰度值进行图像分割的诸多算法中, 最经典的主要有聚类分析和阈值分割两种[2]. 阈值分割算法即设定合理的灰度阈值, 对图像进行筛选及分割的方法, 相比于聚类分析算法, 具有计算简单、 速度快等优点[3], 因此更适用于对于生产效率有要求的工业生产中.
对于颜色信息较少的情况(图1(a)和图1(c)), 可通过实验快速找出颜色对应的合理阈值, 快速有效地对图像进行分割. 但对于颜色信息较多的情况(图1(b)和图1(d)), 每一次阈值的微小调整或者光照条件的微弱变化, 都可能会导致分割结果发生较大变化, 即对于颜色信息较多的图像, 简单地阈值分割算法鲁棒性较差. 为了提高阈值分割算法的鲁棒性, 本文提出了一种图像局部增强和阈值分割相结合的算法. 在处理过程中, 先对图像进行一次粗略的阈值分割, 然后对筛选结果进行图像增强, 再对图像进行第二次阈值分割获取到最终的识别结果.
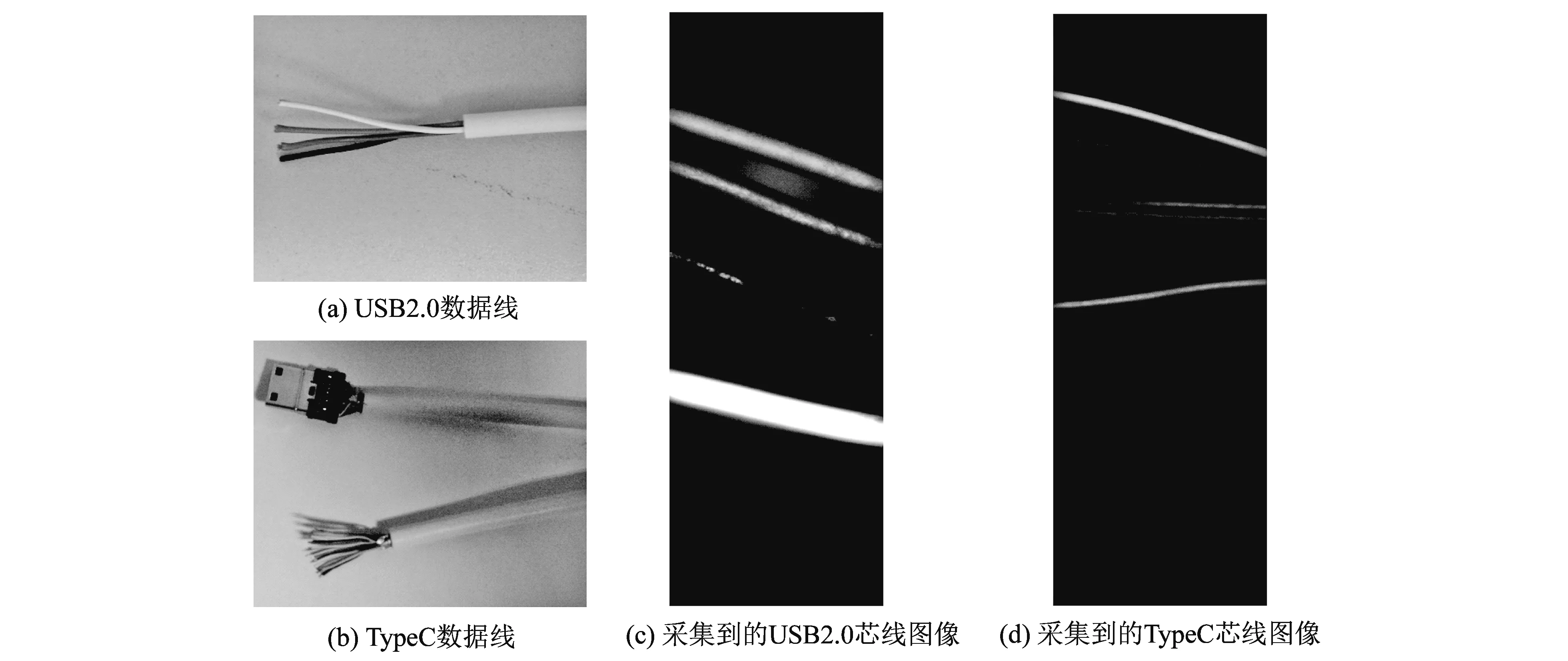
图 1 数据线及采集到分散开的芯线图像Fig.1 Dataline and collected images of distributed core lines
文中第一部分简单介绍了阈值分割算法及与之相关的色彩空间, 第二部分简单介绍了图像增强算法, 第三部分展示了本文所采用的算法及实验结果.
1 阈值分割
阈值分割算法是一种在灰度图像中应用最广泛的算法, 它将图像根据灰度等级分割成不同的区域[3], 所寻找目标区域即满足式(1)条件的区域, 其中G表示图像灰度值,G0表示目标灰度值,thres表示所设定阈值.
G∈[G0-thres,G0+thres).
而对于彩色图像, 图像中包含信息比较复杂, 因此不能简单地用灰度值信息对其进行阈值分割. 而彩色图像可看作由多个包含不同信息的灰度图像相结合而成, 每个灰度图像称为一个通道, 而多个灰度图像组合而成的空间成为色彩空间.
色彩空间(又称为颜色模型)即颜色的表示方法, 最常见的为RGB空间, 即三原色(红、 绿、 蓝)模型, 另外还有HSV空间、CIELab空间、YIQ空间、CMYK空间等应用于不同场合的色彩空间[4]. 在图像分割中, 应用最广泛的为RGB空间、HSV空间和CIELab3种[2].
RGB颜色模型为计算机中存储和显示所采用的模型, 每一种颜色都用红、 绿、 蓝3种基色分量表示. 该颜色空间为图 2 所示的立方体, 3个坐标轴分量分别为红、 绿、 蓝3种基色分量, 原点处为黑色, 3分量最大值处为白色.

图 2 RGB单位立方体Fig.2 RGB color space represented in a cube
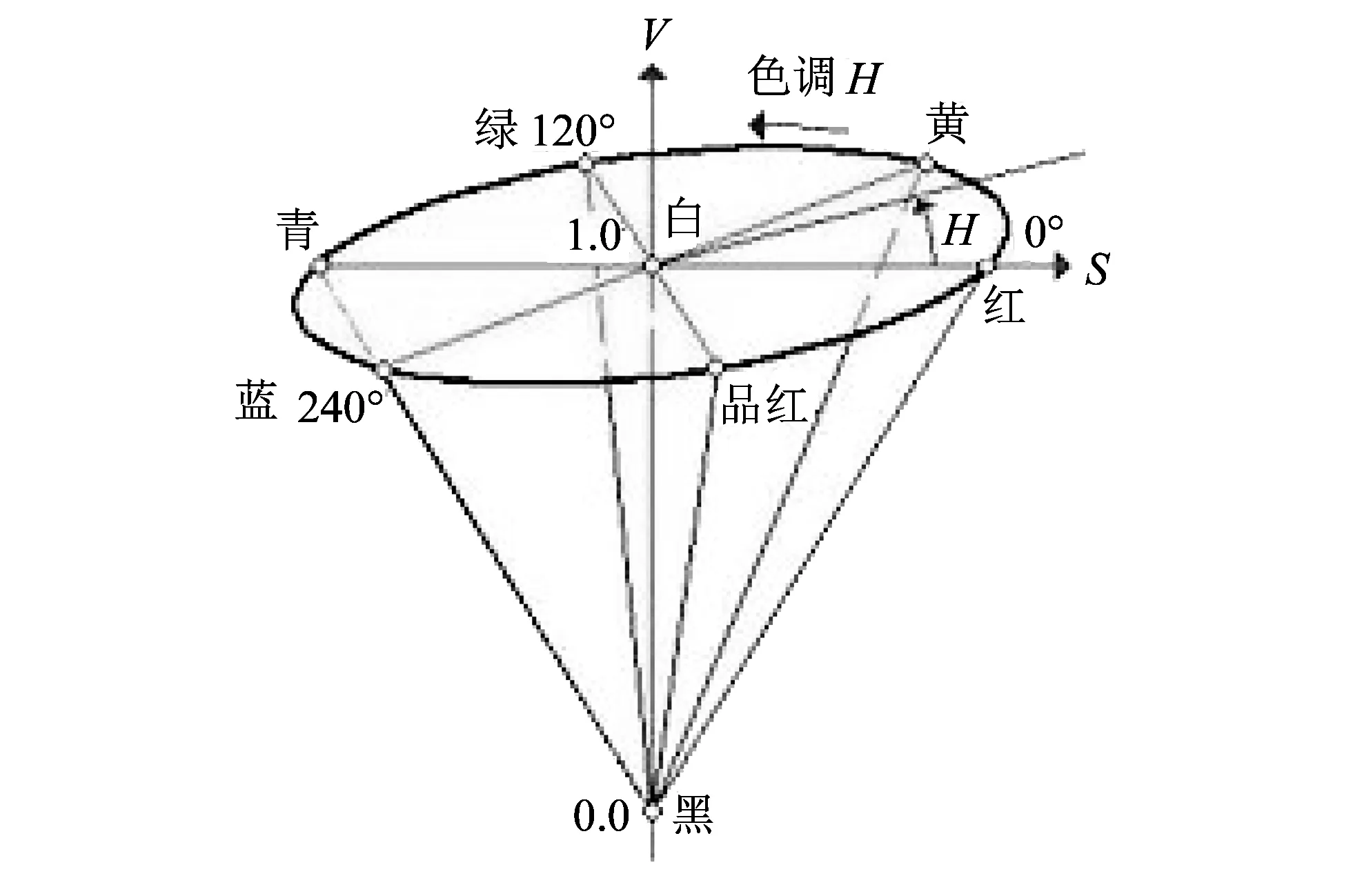
图 3 HSV色彩空间Fig.3 HSV color space
RGB空间简单直观, 但由于R,G,B3通道之间关联性很弱, 在颜色识别过程中难以将其有机结合起来. 因此, 借鉴人眼对颜色的直观感受, 发展出了HSV等色彩空间, 3个通道分量分别表示色调(Hue)、 饱和度(Saturation)、 亮度(Value)值, 其空间模型见图 3. 其竖直轴表示亮度值(0~1), 与图像的色彩信息无关; 圆截面半径方向表示饱和度值(0~1), 即色彩的鲜艳程度; 周向角度表示色调值(0~360), 即主要色彩倾向[4].
国际照明委员会定义了一种与设备无关的颜色模型——CIEXYZ模型,X,Y,Z3通道的值可以由R, G, B 3通道的值通过线性变换获得, 变换公式为[5]
之后又对XYZ空间进行非线性变换定义了Lab空间, 变换公式为[5]
式中:X0,Y0、Z0为颜色为白色时变换得到的X,Y,Z值.
由于CIE颜色空间多色彩的感知更均匀, 因此在提出后被应用到了多个领域的彩色图像处理过程中.
将图像在颜色空间中表示后, 即可选择合理的一个或几个通道, 结合灰度图像的阈值分割算法对彩色图像进行阈值分割.
2 图像增强
图像增强是对图像进行处理, 以突出感兴趣信息的过程. 图像增强通常从两个角度来进行, 一是将对比度拉伸以放大感兴趣信息, 二是对一些细节信息保留和重现[7]. 从手段上来说, 通常可分为空域增强和频域增强两种. 空域增强即直接在空间域中对像素灰度值进行变换增强的方法, 包含直方图处理、 灰度变换等; 频域增强则需要将图像先通过傅立叶变换转换到频率域, 在频率域对图像进行一系列操作后, 再通过傅立叶反变换转换到空间域以实现对图像的增强, 典型的有平滑滤波、 锐化滤波、 同态滤波等[8].
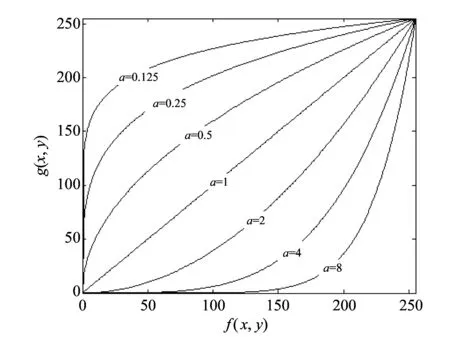
图 4 指数变换增强曲线Fig.4 Curve of exponential enhancement
灰度变换是直接对图像的灰度值进行变换以拉伸对比度的一种方法, 包含线性变换、 对数变换、 指数变换等多种方式. 其中指数变换的公式为
式中:g(x,y)表示变换后的灰度值;f(x,y)表示原图像的灰度值;c为系数;a为指数.
在指数变换中, 通过对指数值a进行调整, 可以方便地对不同范围的灰度进行放大以增强对比度. 图 4 为不同指数情况下的变换曲线, 由图 4 可以看出a<1时, 主要对灰度值较小的部分进行了放大, 对灰度值较大的部分进行了缩小, 由此突出表达了图像灰度值较小的部分, 反之,a>1时, 突出表达了图像中灰度值较大的范围.
3 算法实现及实验结果
对于颜色信息较少的情况(图1(c)), 经过一次简单的阈值分割即可快速稳定地对图像进行分割. 而对于图像信息较多的情况(图1(d)), 一次简单的阈值分割无法有效地识别出所有颜色信息, 而且鲁棒性也较差. 若能对感兴趣灰度值区域有效放大和突出显示, 应该有利于对图像进行识别和分割. 考虑到指数函数增强的特殊性, 提出了一种结合阈值分割和图像增强的分割算法, 如图 5 所示. 图 5 所示算法的整体流程图, 大体描述为初步筛选、 图像增强、 二次筛选3步.
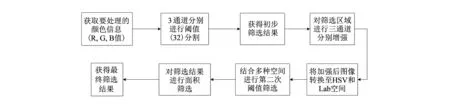
图 5 算法流程图Fig.5 Flow chart of algorithm
在获取图像后, 要对图像进行处理, 首先应指定要识别的颜色信息, 该信息应为已知信息. 但鉴于工作场景发生巨大变化时, 采集到的图像也会差异很大, 而在连续工作过程中, 工作场景不会发生很大变化, 因此将每次工作场景变化后采集到的第一副图像作为标准图像, 由人为选择一小块标准色对应区域, 求该区域的平均值作为该颜色的标准值, 并将其存储作为后续图像处理中的输入信息.
在获取到要处理颜色(以下称处理色)对应的输入信息(R0,G0,B0)后, 以设定的阈值对图像进行初次筛选, 该阈值应该能够保证完整获取到处理色芯线对应的区域. 通过实验, 将该阈值设置为32, 即初次筛选将满足式(5)条件的部分提取出来, 图像其他部分全置为0.
在获得初步筛选结果后, 要对图像R, G, B 3通道分别进行增强. 图像中的感兴趣信息为处理色, 图像增强应突出显示处理色相近部分. 参考图4的指数变换增强曲线, 选定了以下增强变换公式
式中:g(x,y)表示变换后的灰度值;f(x,y)表示原图像的灰度值;c为系数;σ为处理色值, 即R0、G0、B0;a为指数, 应取小于1的值.
图 6 中分别给出了a=0.1, 0.2, 0.3, 0.4, 0.5时对应的增强曲线, 可以看出, 增强可以达到以σ为中心, 突出表达处理色相近区域的效果. 最终在实验中选用了c=45.25,a=0.3对图像进行增强处理.
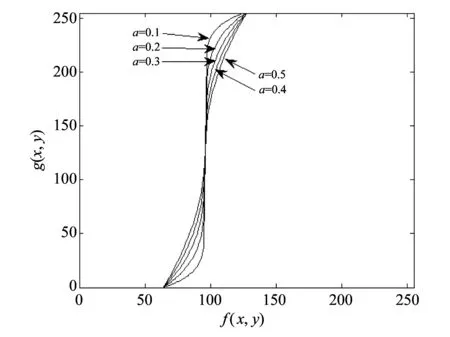
图 6 图像增强曲线Fig.6 Curve of image enhancement
图像增强完成后, 将增强后的图像转换到HSV和Lab空间, 然后结合3种颜色空间的多个通道对图像进行第二次阈值分割. 经过多次实验验证, 最后选取了R, G, B, H, S, L 6个通道相结合的阈值筛选, 阈值设置为96, 即筛选满足下式的区域
式中:Rt,Gt,Bt,Ht,St,Lt由R0,G0,B0变换得到.
图 7 给出了其中一种颜色芯线的图像增强及分割结果, 由图7(c)可以看出, 除了分割出处理色对应区域外, 还有一部分误筛选结果, 因此又增加了一步面积筛选, 以筛选掉误识别区域及其他一些微小的噪声区域. 增加面积筛选后的结果见图7(d).
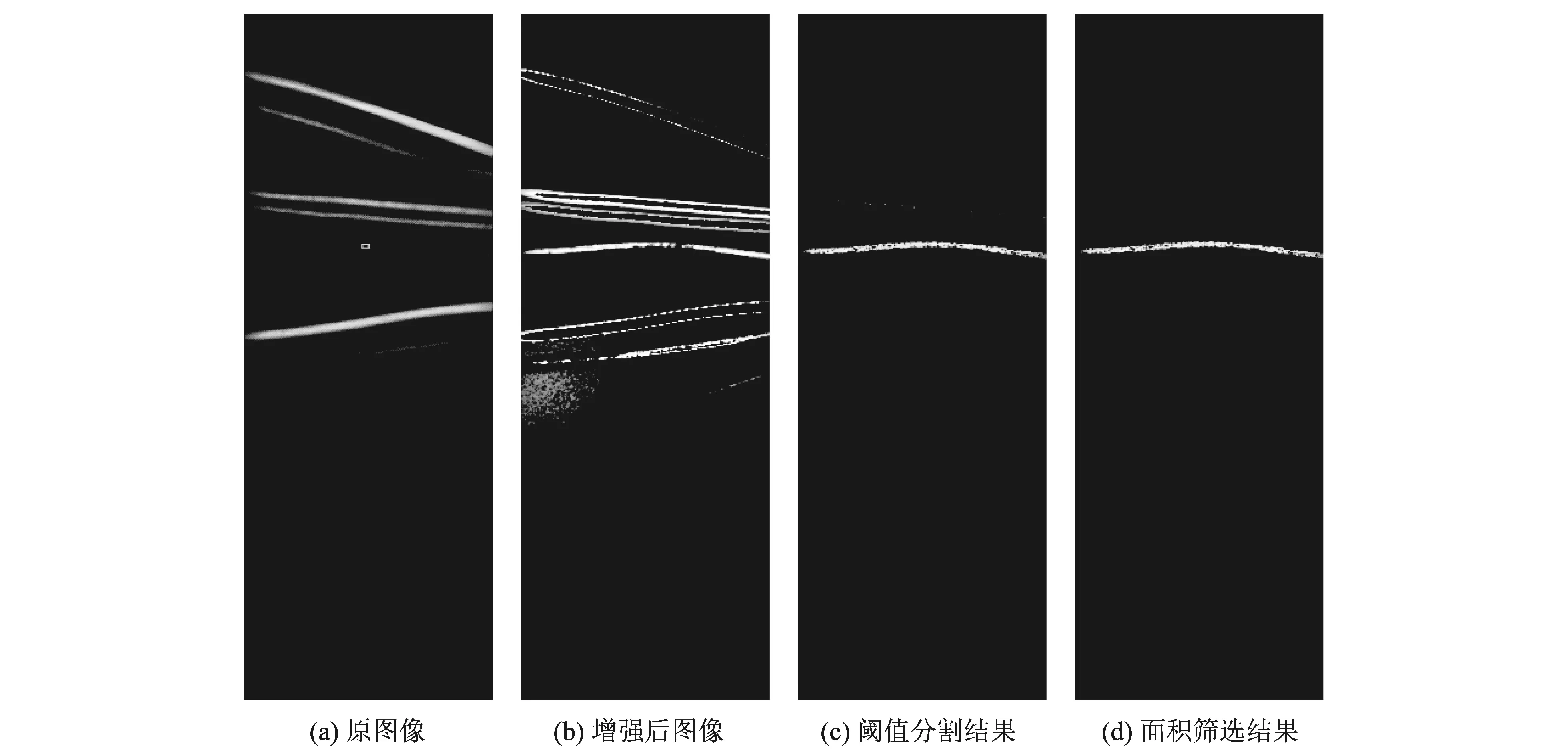
图 7 一种颜色的分割结果Fig.7 The segmentation result of one color
实验中所采用图像共有12种颜色的芯线, 在整个实验过程中, 有10种颜色可被很好地分割出对应区域, 但有2种芯线分割结果很不理想, 见图 8. 图中白色芯线由于本身灰度跨度太大而无法被识别出完整区域, 黑色芯线由于与背景色过于接近导致大量的背景被误识别.
由图 8 可以看出, 白色芯线虽分割效果不理想, 但不会对其他芯线的识别造成影响, 但黑色芯线会对其他芯线的分割造成很大影响, 因此在整幅图像分割实验中, 将黑色芯线的处理排除在外, 处理结果见图9.
图9(d)显示了用图9(a)图像存储的颜色标准值作为输入值处理图9(c)的结果, 可以看出, 处理结果比较理想.

图 9 去除黑色芯线后整体处理结果Fig.9 The processed result without regarding for black core lines
4 结 论
本文主要针对数据线生产自动化过程中遇到的芯线图像分割问题, 提出了一种结合局部增强和阈值分割的图像分割算法. 算法描述为: 首先通过一次阈值分割初步筛选, 缩小要进行增强的图像范围, 以减小计算量; 然后对初步筛选的结果进行指数函数增强, 有效地对感兴趣区域进行放大和突出显示; 对增强后的图像再进行第二次阈值分割筛选和面积筛选, 分割出合理的结果.
该方法的主要优点为: ① 计算过程简单, 速度快, 能够满足工业生产对生产效率的要求; ② 该算法能够有效对多种颜色图像进行分割; ③ 算法鲁棒性较好, 在工作环境相对稳定的情况下处理效果稳定.
但文中图 8 所示结果也揭示了该算法的一些缺陷: ① 对于与背景颜色接近的颜色, 不能够有效分割; ② 当芯线所处区域光照不均匀, 导致该芯线图像灰度跨度比较大时, 不能够有效分割. 对于以上缺陷, 一方面可以通过改善硬件条件, 如调整芯线颜色, 设置合理的工作背景, 改进光源等; 另一方面也应该在算法上作进一步研究, 以适应多种多样复杂的工作环境.
[1] Pal N R, Pal S K. A review on image segmentation techniques[J]. Pattern Recognition, 1993, 26(9): 1277-1294.
[2] Vantaram S R. Survey of contemporary trends in color image segmentation[J]. Journal of Electronic Imaging, 2012, 21(4): 177-187.
[3] Sezgin M, Sankur B. Survey over image thresholding techniques and quantitative performance evaluation[J]. Journal of Electronic Imaging, 2004, 13(1): 146-165 .
[4] 刘金桥. 基于机器视觉系统的颜色识别研究[D]. 乌鲁木齐: 新疆大学, 2009.
[5] Cheng H D, Jiang X H, Sun Y, et al. Color image segmentation: advances and prospects[J]. Pattern Recognition, 2001, 34: 2259-2281.
[6] Cheng H D, Jiang X H, Wang J L. Color image segmentation based on homogram thresholding and region merging[J] . Pattern Recognition, 2002, 35(2): 373-393.
[7] 李艳梅. 图像增强的相关技术及应用研究[D]. 成都: 电子科技大学, 2008.
[8] 李阳, 常霞, 纪峰. 图像增强方法研究新进展[J]. 传感器与微系统, 2015, 34(12): 9-15. Li Yang, Chang Xia, Ji Feng. New progress of research on image enhancement method[J]. Transducer and Microsystem Technologies, 2015, 34(12): 9-15. (in Chinese)
[9] 魏婷婷, 纪峰, 庞胜军. 图像增强算法新进展[J]. 宁夏师范学院学报(自然科学), 2012, 33(6): 63-69. Wei Tingting, Ji Feng, Pang Shengjun. New progress for image enhancement algorithm[J]. Journal of Ningxia Teachers University (Natural Science), 2012, 33(6): 63-69. (in Chinese)
声 明
本刊已许可中国学术期刊(光盘版)电子杂志社、 万方数据知识服务平台、 超量网等多家单位在其网站及其系列数据库产品中, 以数字化方式复制、 汇编、 发行、 信息网络传播本刊全文。 该社著作权使用费与本刊稿酬一并支付。 作者向本刊提交文章发表的行为即视为同意我编辑部上述声明。
Color Image Segmentation Algorithm Used for Core Lines Based on Local Enhancement and Thresholding
LI Baozhong1, WANG Xiaohao2, LUO Chao1
(1. China Academy of Engineering Physics, Mianyang 621900, China; 2. Graduate School at Shenzhen, Tsinghua University, Shenzhen 518055, China)
The identification of different colors of core lines is one of the primary restrictions of automation in dataline production. The simple and effective thresholding technic is not robust enough in detecting various colors with tiny differences. An image enhance process based on exponential function can effectively highlight the region of interest. A method that coupled image enhancement with thresholding was proposed in this paper. The object region was extracted by thresholding when the image had been locally enhanced. The experiments showed that the proposed method was effective and robust enough in distinguishing the various colors of core lines.
Image segmentation; color space; thresholding; image enhancement
2016-11-29
李保忠(1990-), 男, 硕士生, 主要从事USB焊锡机自动排线机构的设计与实现研究.
1671-7449(2017)04-0311-07
TH89
A
10.3969/j.issn.1671-7449.2017.04.006
