果园升降平台自动调平控制系统设计与试验
2017-07-12樊桂菊王永振张晓辉赵金英宋月鹏
樊桂菊,王永振,张晓辉※,赵金英,宋月鹏
(1. 山东农业大学机械与电子工程学院,泰安 271018; 2. 山东省园艺机械与装备重点实验室,泰安 271018;3. 中国农业机械化科学研究院,北京 100083)
果园升降平台自动调平控制系统设计与试验
樊桂菊1,2,王永振1,张晓辉1,2※,赵金英3,宋月鹏1,2
(1. 山东农业大学机械与电子工程学院,泰安 271018; 2. 山东省园艺机械与装备重点实验室,泰安 271018;3. 中国农业机械化科学研究院,北京 100083)
为提高果园升降平台调平精度和稳定性,设计了一种自动调平控制系统。通过调平机构动力学分析,建立了调平控制系统数学模型;利用融合卡尔曼滤波的模糊PID控制电磁阀驱动油缸伸缩调整工作台姿态,实现其自动调平。对控制系统进行仿真,结果表明:模糊PID控制较PID控制性能好,峰值时间缩短47.82%,调节时间缩短48.10%,最大超调量减小52.78%,经卡尔曼滤波后控制误差降低44.57%;对系统响应时间和调平效果进行测试,结果表明:自动调平控制系统响应时间为0.078 s;在平台不升降和升降2种工况下,最大坡度满载下自动调平最大误差分别为1.08°和1.74°,调平精度相对原果园升降平台调平系统分别提高了1.69°和1.91°,较好的实现了工作台自动调平控制。该研究为农业机具调平控制提供参考。
算法;控制;设计;升降平台;自动调平
0 引 言
中国果园大多分布于丘陵山地,因地形限制,果园机械化程度较低。尤其修剪果枝、疏花落果、采摘果实等作业主要靠人工登梯、爬树等完成,安全隐患大,作业效率低[1-3]。因此设计一种实现自动调平的果园升降平台对于提高果园机械化水平和作业效率具有重要意义。
最早生产果园升降平台的国家主要有美国、澳大利亚和日本,美国、澳大利亚的升降平台主要适用于大型果园;日本丘陵山地较多,生产的果园升降平台小巧、灵活,并具备自动调平功能。国内对果园升降平台的研究相对较晚,尽管取得了一些有价值的成果,但在自动调平控制方面的研究还比较少。刘大为等[4-5]研制了小型果园作业平台,通过液压缸实现工作台升降和调平,但需要人工判断方位和角度调整;孙江宏等[6]研制了一种新型调平自动调平作业平台,采用角度误差控制调平法,系统响应时间快,但不适宜于果园机械;买合木江·巴吐尔等[7]研制了多功能自走式果园作业平台,采用自身质量实现平台调平;山东农业大学研制的果园升降平台[8]利用静液压三角形结构实现了工作台调平,但调平精度和调平效率有待提高。
国内外学者对工程上高空升降平台的调平系统做的研究较多[9-10],一部分学者在农机具[11-13]和微型山地拖拉机[14-15]调平控制方面作了初步探讨,为果园升降平台自动调平控制系统设计与改进提供了重要依据。本文在前期研究基础上设计了一种适用于果园升降平台的自动调平控制系统,建立了调平系统的控制数学模型,通过融合卡尔曼滤波的模糊PID控制电磁阀驱动调平油缸伸缩调整工作台和横梁的相对角度,保持工作台在预期状态作业,以期实现工作台快速精准调平。
1 自动调平控制原理
果园升降平台整体结构如图1所示,包括动力装置、行走机构、升降机构、液压系统、调平机构、工作台和自动调平控制系统等。其中调平控制系统主要包括倾角传感器、卡尔曼-模糊PID控制器、调平液压油缸、横梁、工作台和调平液压系统,如图2所示。其调平工作原理为:当拖拉机带动升降平台在果园行驶或进行升降作业时,工作台与水平面的夹角将发生变化,安装在工作台的倾角传感器实时测量工作台倾斜角度,自动调平控制系统根据采集的角度信号做出决策,通过模糊PID控制电磁阀驱动调平油缸伸缩调整工作台与横梁的相对角度,结合卡尔曼算法对控制信号进行滤波处理,削弱地形随机干扰和测量噪声的影响,提高系统的稳定性能,从而使工作台保持预期角度作业,实现工作台自动调平。
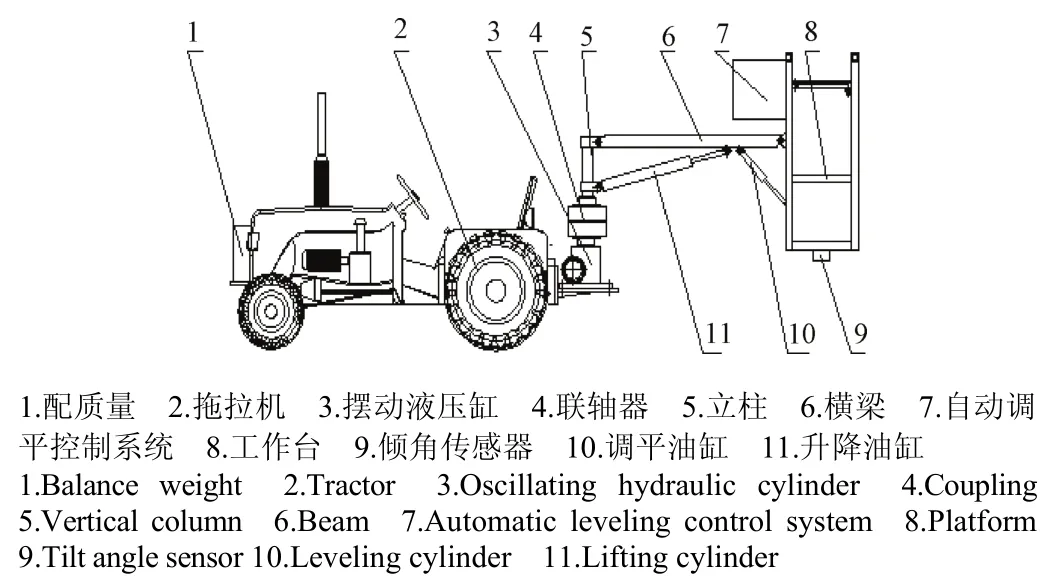
图1 果园升降平台结构示意图Fig.1 Schematic diagram for structure of orchards lifting platform

图2 自动调平控制结构示意图Fig.2 Schematic diagram of automatic leveling control system
2 调平控制系统数学模型
2.1 调平机构动态微分方程
忽略铰链间隙和摩擦力以及机组前进的影响,升降平台调平机构为刚性系统,其结构简化模型和受力如图3所示。
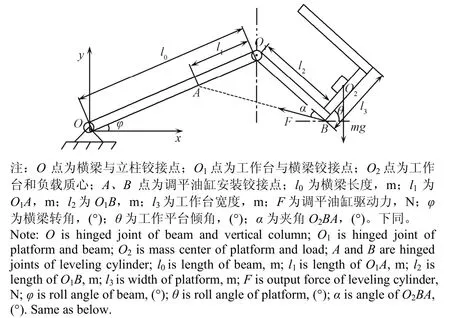
图3 调平机构简化模型Fig.3 Simplified model of leveling mechanism
1)当平台不升降时,工作台作定轴转动,根据牛顿定律得

式中l4为调平油缸长度,m;1OJ为工作台和负载对O1轴的转动惯量,kg·m2;m为工作台和负载质量,kg;g为重力加速度,m/s2。
2)当平台升降时,工作台作平面运动,忽略横梁质量,其运动微分方程为

式中JO2为工作台和负载对O2轴的转动惯量,kg·m2;xO2、yO2分别为工作台质心坐标;ΣMo(F)为外力对O点的力矩;由图3可知:
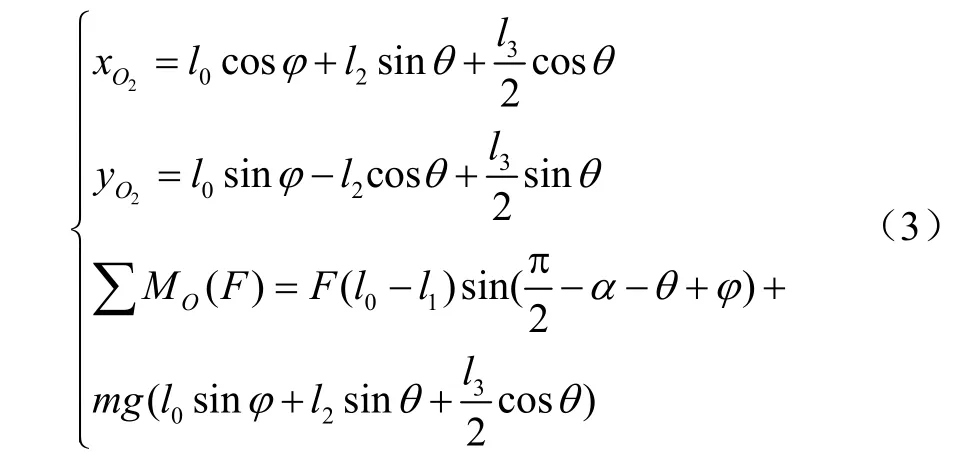
对2Ox、2Oy分别求二阶导数用矩阵表示
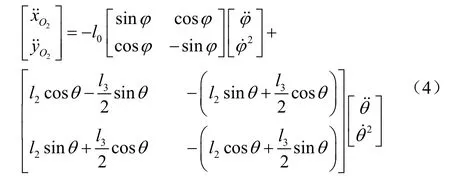
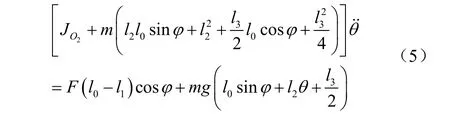
假设横梁匀角速度转动,将式(4)代入式(2),利用泰勒级数展开并忽略一阶高次项得工作台微分方程
2.2 液压系统微分方程
1)电磁阀流量方程fQ为

式中Kq为流量增益系数;XV为阀芯位移,m;Kc为流量压力系数;Pf为液压缸油压差,Pa。
2)调平油缸流量方程gQ为

式中Ap为活塞有效面积,m2;S为活塞位移,m;β为油液有效弹性模量,Pa;V为进回油侧总容积,m3;Cl为总泄漏系数。
3)调平油缸驱动力F为

式中Bc为液压油黏性阻尼系数,N/m2;kl为负载弹簧刚度,N/m。
由式(6)、(7)、(8)得
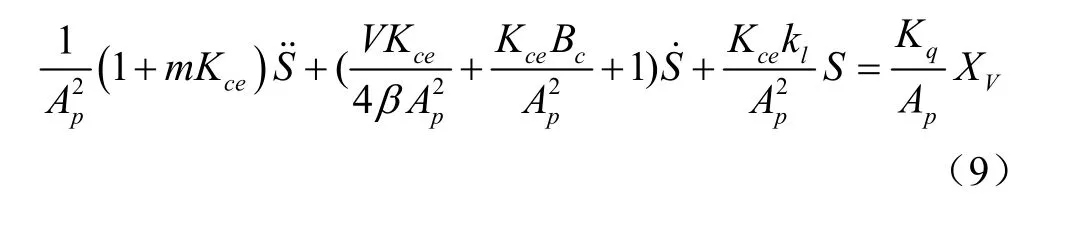
式中Kce为总压力流量系数。
2.3 调平控制系统状态空间模型
根据调平机构动态方程和调平液压系统微分方程,以工作台倾角(x1)、倾角变化率(x2)、调平油缸位移(x3)和位移变化率(x4)作为系统状态向量,电磁阀阀芯位移为输入,工作台倾角为系统输出,令X=[x1x2x3x4]T, U=XV,由式(1)、(5)、(8)、(9)得调平控制系统状态空间模型为
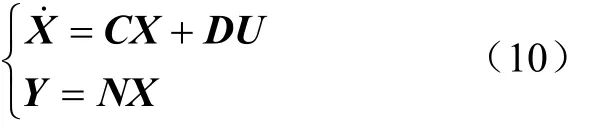
其中C、D为系数矩阵,分别为
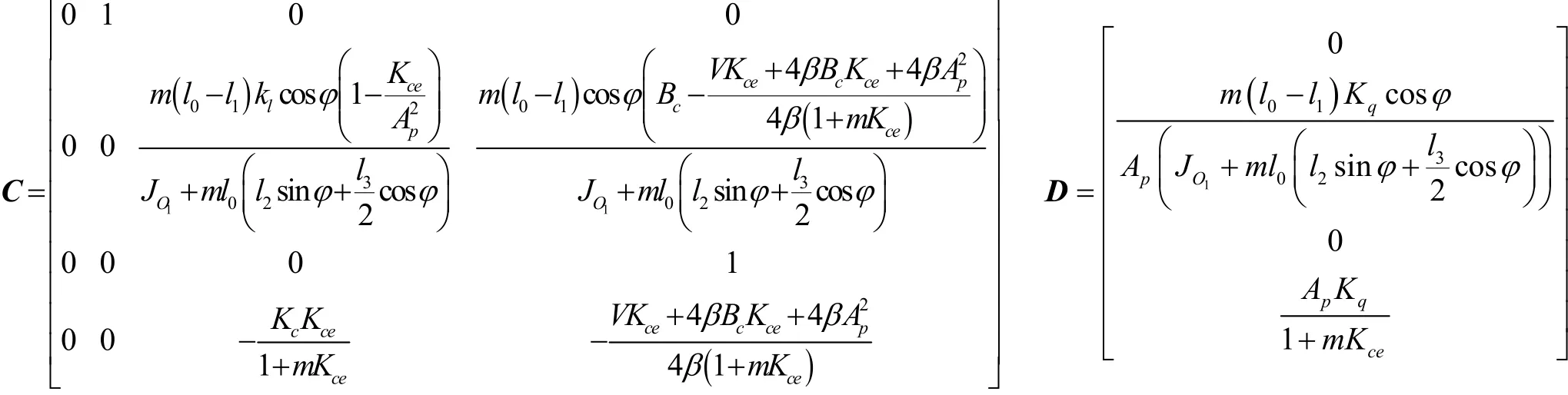
N为输出矩阵,N=[1 0 0 0]T。
3 卡尔曼滤波的模糊PID控制
在作业环境存在干扰下,工作台容易出现抖动过大、调平时间长、超调量较大等不稳定问题,将模糊控制与PID控制结合既消除模糊控制下的残差问题,又解决PID控制难以解决的复杂工况问题,但系统在一定范围内处于波动状态,而卡尔曼滤波器在抑制干扰和消弱噪声方面具有明显的效果,因此,本文设计了融合卡尔曼滤波的模糊PID控制系统[16-18],结构如图4所示。

图4 卡尔曼-模糊PID控制器结构图Fig.4 Structure diagram of Kalman fuzzy PID controller
3.1 模糊PID控制
3.1.1 控制算法
传统PID离散化控制算法[19]

模糊PID控制[20-24]就是在PID算法基础上,对工作台倾角误差及其变化率进行模糊化处理后,通过模糊控制器输出PID参数在线调整量ΔKp、ΔKi和ΔKd,与PID参数初始值相加,实现PID参数在线自整定,即
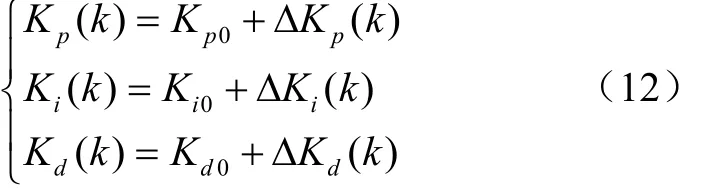
式中Kp0、Ki0和Kd0分别为PID参数初始值。
3.1.2 模糊PID控制的实现
以工作台倾角误差e(k)和倾角误差变化率ec(k)为控制输入量,对应语言变量为E、EC,基本论域分别为[−20,20]和[−3,3];PID参数调整量ΔKp(k)、ΔKi(k)和ΔKd(k)为控制输出量,其语言变量分别为KP、KI、KD,基本论域分别为[−0.6,0.6]、[−0.43,0.43]、[−0.07,0.07]。设定输入输出对应论域皆为[−6,6],模糊子集为{NB,NM,NS,ZO,PS,PM,PB},各元素分别表示为负大、负中、负小、零、正小、正中、正大,则e(k)和ec(k)的量化因子分别为Ke=6/20=0.3、Kec=6/3=2;ΔKp(k)、ΔKi(k)和ΔKd(k)的比例因子分别为KΔKp=6/0.6=10,KΔKi=6/0.43=13.95和KΔKd=6/0.07=85.71。各变量隶属度函数均采用灵敏度较高的三角形函数,其曲线如图5所示。
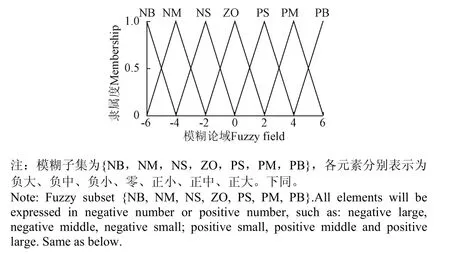
图5 隶属度函数曲线Fig.5 Curve of subordinating degree function
根据PID比例、积分和微分参数对ΔKp(k)、ΔKi(k)和ΔKd(k)影响,并结合工程实际经验制定KP、KI、KD的模糊规则表,以KP为例,如表1所示。
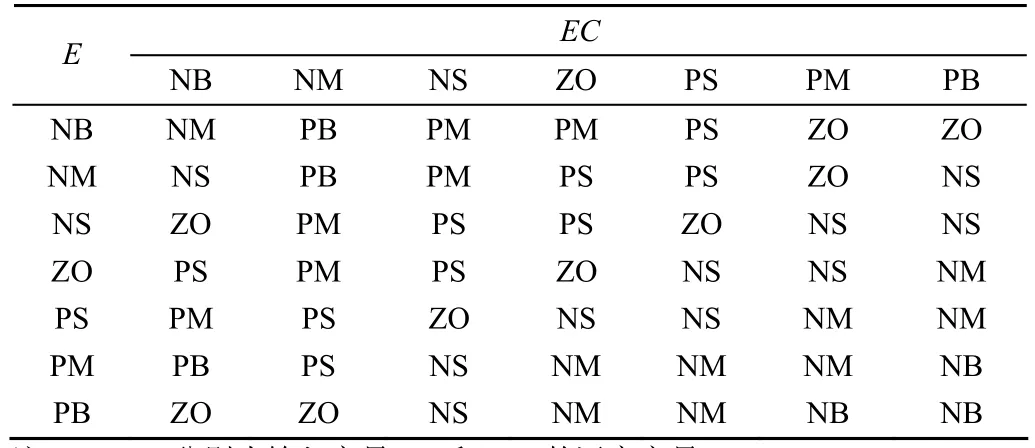
表1 KP模糊控制规则表Table 1 Fuzzy control rule list of KP
再根据模糊规则表,建立输出与输入论域的模糊关系

将上述模糊关系运用Mamdani 推理得相应的控制输出量模糊集合

采用重心法对输出的模糊集合进行解模糊化,分别得到KP、KI、KD的精确量,再根据比例因子得到PID参数在线调整量ΔKp、ΔKi和ΔKd,通过式(11)实现控制参数在线整定,从而控制系统运行。
3.2 卡尔曼滤波
设T为采样周期,将控制系统数学模型离散化后由式(10)得到状态方程和观测方程如下
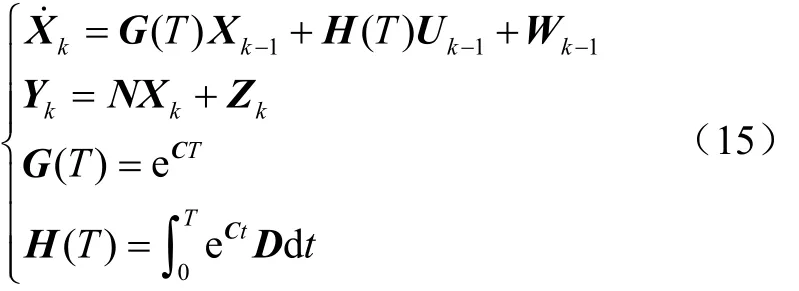
式中Xk为k时刻状态向量;Xk-1为(k−1)时刻状态向量;Uk-1为(k−1)时刻电磁阀阀芯位移量;Wk-1为(k−1)时刻干扰噪声;Yk为k时刻观测量,即倾角传感器测量值;Zk为k时刻测量噪声。
根据卡尔曼滤波线性递推[25-27]得到系统状态预测方程

式中Xˆk为k时刻先验状态预测值;Xˆk−1为(k−1)时刻状态最优值。对应于Xˆk的协方差矩阵Pk−为

式中Pk-1为(k−1)时刻Xˆk−1对应的协方差矩阵;G(T)T为G(T)的转置矩阵;Q为干扰噪声协方差矩阵。
卡尔曼增益方程为

式中NT为N的转置矩阵;R为测量噪声协方差矩阵。k时刻卡尔曼滤波估计最优值Xˆk为

(k+1)时刻ˆkX的更新协方差矩阵kP为

4 仿真分析
利用Matlab7.0/Simulink6.0建立升降平台调平控制系统模型,假设升降平台在水平良好路面上,横梁以5 rad/s匀角速度转动,对系统进行仿真,所需的部分参数如表2所示。4
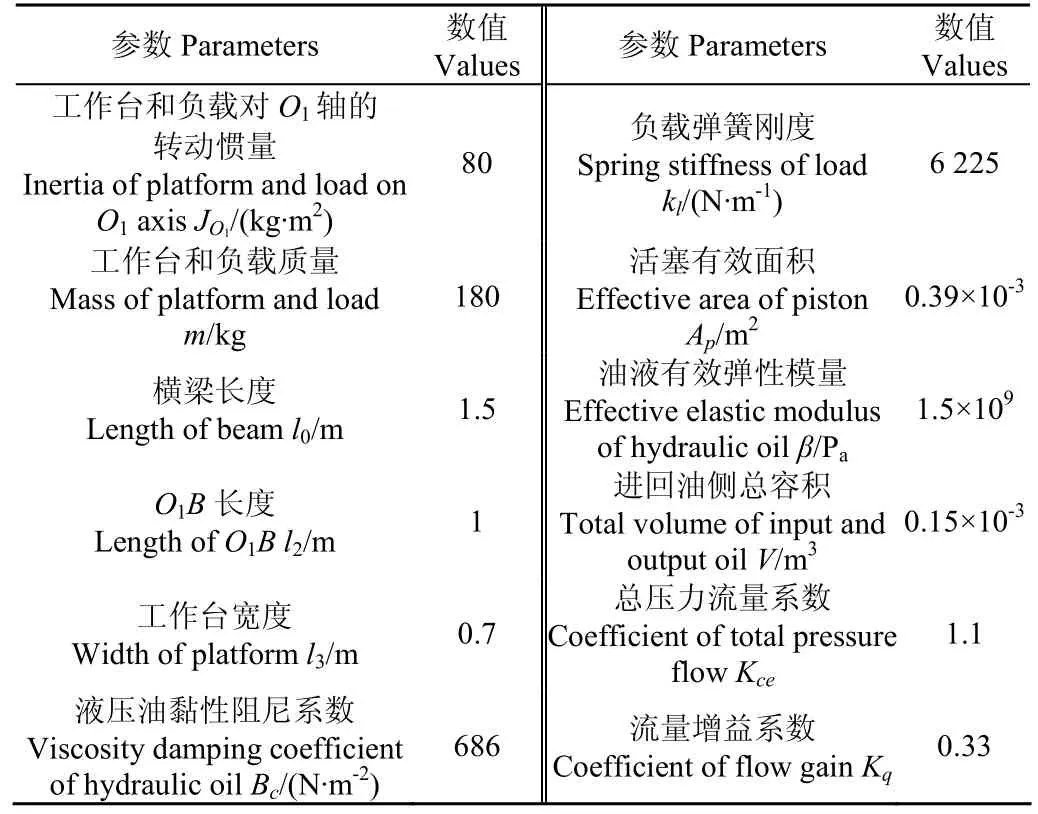
表2 仿真模型参数Table 2 Parameters of simulation model
.1 PID和模糊PID控制
给定阶跃信号的幅值为工作台倾角1°,则在传统PID控制和模糊PID控制下,系统阶跃输入时域响应曲线如图6所示,控制性能指标对比如表3所示。其中,超调量Mp通过式(21)计算。

式中c(tp)为响应的第一峰值;)(∞c为响应稳态值。

图6 PID和模糊PID控制单位阶跃响应曲线Fig.6 Unit step response curve of PID and Fuzzy PID control system

表3 控制性能指标对比Table 3 Comparison on control performance index
由表3可以计算出,模糊PID控制与PID相比,系统的上升时间缩短43.75%,峰值时间缩短47.82%,调节时间缩短48.10%,最大超调量减小52.78%,表明模糊PID控制总体快速性和平稳性较好。
4.2 卡尔曼滤波的模糊PID控制
在建立的卡尔曼滤波器状态方程中加入均方差为0.1的系统干扰与测量白噪声信号,输入阶跃信号幅值为1,干扰噪声协方差矩阵Q=0.5I,测量噪声协方差矩阵R=2I,仿真时间间隔为2.5 s,系统阶跃响应和误差响应曲线分别如图7和图8所示。
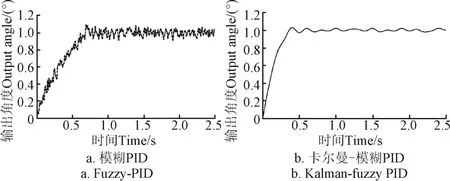
图7 模糊PID和卡尔曼-模糊PID控制单位阶跃响应曲线Fig.7 Unit step response curve of fuzzy PID and Kalman-fuzzy PID control system
控制系统的误差[28-29]指系统期望输出值与实际输出值之差,其数学表达式为e(t)

式中r(t)为期望输出值,c(t)为实际输出值。
通常采用稳态误差来评价系统的准确性,稳态误差ess的数学描述如式(23)所示。工程中一般认为调节时间ts的误差为稳态误差。

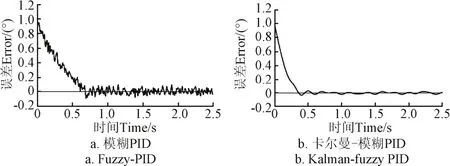
图8 模糊PID和卡尔曼-模糊PID控制误差响应曲线Fig.8 Error response curve of fuzzy PID and Kalman-fuzzy PID control system
由图7和图8分析可知,卡尔曼滤波之前,控制系统响应较慢,峰值时间为0.71 s,t=2.5 s时,稳态误差为−0.092°;经卡尔曼滤波后,峰值时间为0.40 s,t=2.5 s时,稳态误差为−0.051°,降低了44.57%,表明卡尔曼滤波对干扰和噪声有较好的抑制作用。
5 试验与分析
5.1 系统响应时间
升降平台自动调平控制响应时间[30]包含:单片机运算时间、倾角传感器采集信号时间、电磁阀和调平油缸动作反应时间。其中单片机运算和传感器采集信号时间在系统扫描周期内完成,忽略不计。进行测试程序设计,以单片机发出调平信号至油缸运动1 mm停止的时间记为系统响应时间。升降平台在良好水平路面上,在发动机额定转速下,横梁匀角速度转动,控制系统输出信号后,测得调平油缸从行程最小和最大位置开始运动到执行动作结束的时间,利用HG-C1100激光位移传感器测量油缸伸长量,得出调平控制系统响应时间和油缸位移曲线如图9所示。
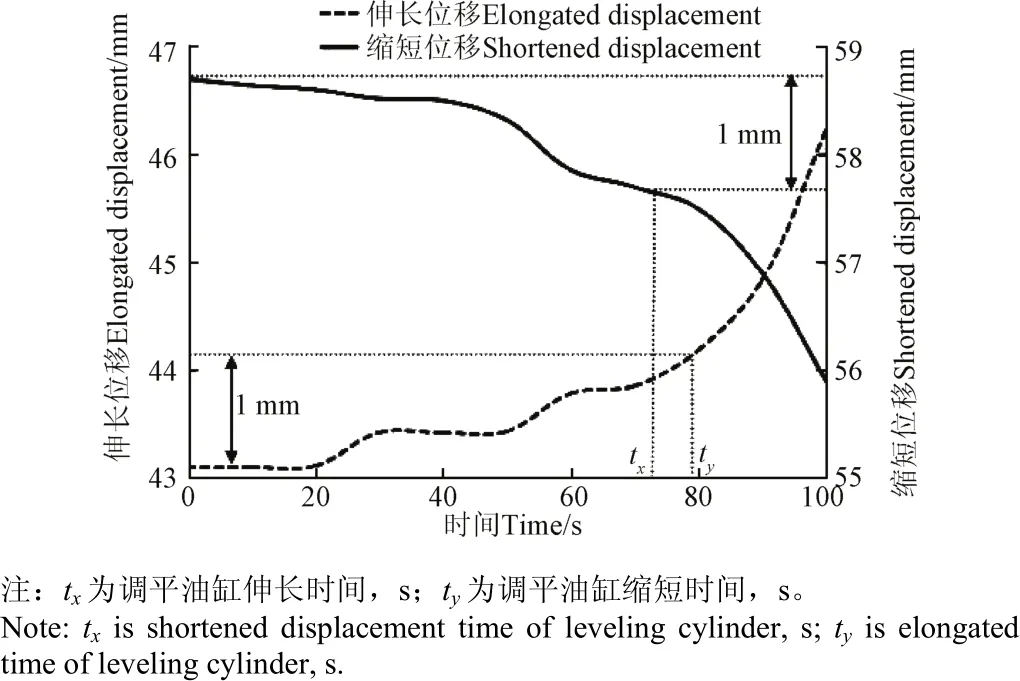
图9 系统响应时间位移曲线Fig.9 Curves of system response time and displacement
由图9可知,调平油缸伸长时,控制系统响应时间为0.078 s,比油缸缩短时的反应时间长0.008 s,主要原因是工作台重力导致液压阻力较大。
5.2 调平测试试验
5.2.1 试验设备与条件
在山东农业大学前期研制的果园升降平台上,安装自动调平控制系统,进行调平效果试验。该平台以拖拉机为动力源,主要参数如表4所示。

表4 果园升降平台主要参数Table 4 Main parameters of orchards lifting platform
由于果园作业环境复杂,地形不规则,地面坡度不宜测量,因此在山东农业大学校内硬质地面上进行试验,测得试验坡地坡度分别为5.1°、10.5°、14.5°、18.8°,如图10所示,试验时间为2016年12月。采用北京瑞芬星通科技有限公司的DMI108数显倾角仪(精度0.01°)和上海直川电子科技有限公司的ZCT230M倾角仪(精度0.05°,数据通过RS485连续输出)测量工作台倾角;采用日本Panasonic公司HG-C1100激光位移传感器测量调平油缸位移量,精度0.01 mm;此外,还包括瑞因思仪器有限公司的质量仪表(200、0.01 kg)、卷尺(3、0.01 m)等。

图10 试验现场Fig.10 Test of field
5.2.2 试验内容及方法
根据《农业机械生产试验方法》(GB/T 5667-2008)[31]进行调平效果试验,以原调平控制系统为对照组,当平台不升降时,安装在工作台的倾角传感器将实时输出工作台倾角,并显示在触摸屏上,观察数据平稳时,停止拖拉机运转,利用瑞芬DMI108数显倾角仪测得工作台倾斜角度;当平台升降时,利用ZCT230M倾角仪将工作台倾角实时在显屏上输出。分析自动调平在不同坡度(5.1°、10.5°、14.5°、18.8°),不同载质量(0、50、100、150 kg)下的调平性能。
5.2.3 试验结果与分析
1)平台不升降工况
当平台不升降时,测试工作台与水平面的倾斜角度,即为调平误差。在不同坡度和不同载质量下分别做3次试验,试验数据如表5所示。
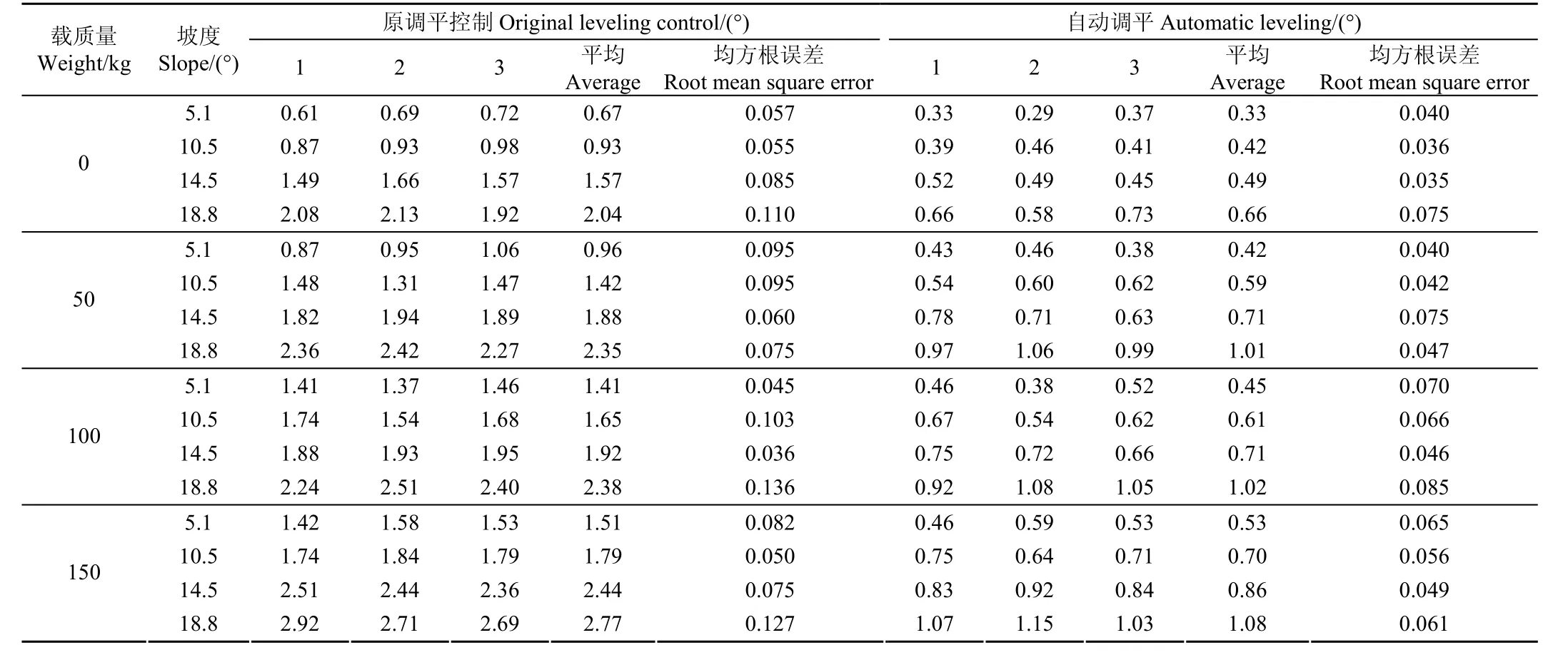
表5 调平数据Table 5 Data of leveling
由表5可知,在4种坡度和载质量下,2种调平误差随着载质量和坡度增加而增大,原调平控制的最大均方根误差为0.136°,而自动调平控制仅为0.085°,离散程度比原调平控制降低37.50%;在最大坡度满载下原调平控制最大误差为2.77°,自动调平最大误差为1.08°,比原调平系统调平精度提高了1.69°。
2)平台升降工况
升降平台在4种坡度(5.1°、10.5°、14.5°、18.8°)下满载情况(150 kg)进行升降作业,试验过程中工作台倾角变化如图11所示。从图11可知,在斜坡上进行升降作业,原调平系统受结构影响,调平误差呈现出周期性的变化,自动调平则没有这种现象。通过对比图11a、11b、11c、11d可知,随坡度增加,原调平系统累积误差不断增加,调平误差呈增大趋势,在4种坡度上最大调平误差分别约为1.73°、2.27°、3.05°、3.65°;自动调平误差相对稳定,工作台倾角始终维持在0°附近,最大调平误差分别约为0.65°、1.12°、1.51°、1.74°,调平精度最大提高了1.91°,满足升降平台工作要求。

图11 两种调平控制的工作台倾角变化Fig.11 Change in tilt angle of platform under two types of leveling control mechanisms
6 结论与讨论
1)设计了一种果园升降平台自动调平控制系统,根据倾角传感器实时采集的工作台倾角值,采用融合卡尔曼算法的模糊PID控制电磁阀驱动调平油缸运动改变工作台位姿,实现工作台自动调平。
2)运用Matlab对控制系统进行仿真,结果表明,这种控制系统较传统PID具有较好的控制效果,峰值时间缩短47.82%,调节时间缩短48.10%,最大超调量减小52.78%,经卡尔曼滤波后误差降低44.57%,有效抑制了干扰信号和测量噪声。
3)对控制系统进行响应时间和调平效果测试,结果表明:系统调平响应快,响应时间为0.078 s;在平台不升降和升降2种工况下,随坡度和负载增加,自动调平误差变化不大,最大分别为1.08°和1.74°,调平精度相对原果园升降平台调平控制系统分别提高了1.69°和1.91°,调平效果较好。
试验过程中,偶尔会出现调平不准确、响应稍慢等现象,分析原因主要有:1)地面起伏不平影响了角度传感器对信号的采集;2)安装铰链间隙引起工作台偏离设定位置;3)升降速度过快,工作台由于惯性出现摆动。另外,该试验样机无横向调平执行机构,仅进行了纵坡调平试验,因此后续工作为增加横向调平机构、研究干扰信号控制算法和系统控制数学模型的精确性,从而实现全方位调平并提高控制精度。
[1] 孟祥金,沈从举,汤智辉,等. 果园作业机械的现状与发展[J]. 农机化研究,2012(1):238-241. Meng Xiangjin, Shen Congju, Tang Zhihui, et al. Actuality and development of orchard machinery and equipment[J]. Journal of Agricultural Mechanization Research, 2012(1): 238-241. (in Chinese with English abstract)
[2] 刘大为,谢方平,李旭,等. 果园采摘平台行走机构的研究现状及发展趋势[J]. 农机化研究,2013(2):249-252. Liu Dawei, Xie Fangping, Li Xu, et al. Research status and development trend of running gear in orchard picking platform[J]. Journal of Agricultural Mechanization Research, 2013(2): 249-252. (in Chinese with English abstract)
[3] 罗锡文,廖娟,胡炼,等. 提高农业机械化水平促进农业可持续发展[J]. 农业工程学报,2016,32(1):1-11. Luo Xiwen, Liao Juan, Hu Lian, et al. Improving agricultural mechanization level to promote agricultural sustainable development[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(1): 1-11. (in Chinese with English abstract)
[4] 刘大为,谢方平,李旭,等. 小型果园升降作业平台的设计与试验[J]. 农机工程学报,2015,31(3):113-121. Liu Dawei, Xie Fangping, Li Xu, et al. Design and experiment of small lifting platform in orchard[J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(3): 113-121. (in Chinese with English abstract)
[5] 王小龙,谢方平,刘大为,等. 果园升降平台调平装置的设计[J]. 湖南农业大学学报,2014,40(5):548-551. Wang Xiaolong, Xie Fangping, Liu Dawei, et al. Design and experiment of the leveling deveice of the orchard lifting platform[J]. Journal of Hunan Agricultural University, 2014, 40(5): 548-551. (in Chinese with English abstract)
[6] 孙江宏,何世风. 一种新型自动调平平台结构与控制系统设计[J]. 机械设计与制造,2015(7):11-15. Sun Jianghong, He Shifeng. Structure and control system design of a new automatic leveling platform[J]. Machinery Design & Manufacture, 2015(7): 11-15. (in Chinese with English abstract)
[7] 买合木江·巴吐尔,李忠新,杨莉玲,等. 多功能自走式果园作业平台的设计与试验[J]. 中国农机化学报,2016,37(11):32-35. Maihemujiang Batuer, Li Zhongxin, Yang Liling, et al. Design and experiment on multifunctional self-propelled orchard working platform[J]. Journal of Chinese Agricultural Mechanization, 2016, 37(11): 32-35. (in Chinese with English abstract)
[8] 樊桂菊,王永振,张晓辉,等. 丘陵山区果园作业平台的设计与试验[J]. 农机化研究,2016(8):77-81. Fan Guiju, Wang Yongzhen, Zhang Xiaohui, et al. Development and experiment of platform for orchards in hill area[J]. Journal of Agricultural Mechanization Research, 2016(8): 77-81. (in Chinese with English abstract)
[9] 高兰. 基于PLC的高空作业平台调平控制系统研究[D].石家庄:石家庄铁道大学,2016. Gao Lan. Design of Leveling Control System for a High Lift Platform Based on PLC[D]. Shijiazhuang: Shijiazhuang Tiedao University, 2016. (in Chinese with English abstract)
[10] 秦敬贤. 基于模糊的高空作业平台自动调平系统[D]. 沈阳:沈阳建筑大学,2012. Qin Jingxian. Research of Suspend Access Platform Automatic Leveling System Based of Fuzzy PID[D]. Shenyang: Shenyang Jianzhu University, 2012. (in Chinese with English abstract)
[11] 胡炼,林潮兴,罗锡文,等. 农机具自动调平控制系统设计与试验[J]. 农业工程学报,2015,31(8):15-20. Hu Lian, Lin Chaoxing, Luo Xiwen, et al. Design and experiment on auto leveling control system of agricultural implements[J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(8): 15-20. (in Chinese with English abstract)
[12] 周浩,胡炼,罗锡文,等. 旋耕机自动调平系统设计与试验[J]. 农业机械学报,2016,47(增刊):117-123. Zhou Hao, Hu Lian, Luo Xiwen, et al. Design and experiment on auto leveling system of rotary tiller[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(Supp.): 117-123. (in Chinese with English abstract)
[13] 陈君梅,赵祚喜,陈嘉琪,等. 水田激光平地机非线性水平控制系统[J]. 农业机械学报,2014,45(7):79-84. Chen Junmei, Zhao Zuoxi, Chen Jiaqi, et al. Design of nonlinearleveling control system for paddy land leveler[J].Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(7): 79-84. (in Chinese with English abstract)
[14] 王涛,杨福增,王元杰,等. 山地拖拉机车身自动调平控制系统的设计[J]. 农机化研究,2014(7):232-235. Wang Tao, Yang Fuzeng, Wang Yuanjie, et al. Design of body automatic leveling control system of hillside tractor[J]. Journal of Agricultural Mechanization Research, 2014(7): 232-235. (in Chinese with English abstract)
[15] 张战文. 微型履带山地拖拉机稳定性能研究[D]. 杨凌:西北农林科技大学,2011. Zhang Zhanwen. Research on Stability of Micro-Hillside Caterpillar Tractor[D]. Yangling: Northwest A&F university, 2011. (in Chinese with English abstract)
[16] 刘俊,陈无畏. 车辆电动转向系统的卡尔曼滤波模糊PID控制[J]. 农业机械学报,2007,38(9):1-5. Liu Jun, Chen Wuwei. Study on EPS using fuzzy and PID multi-mode control with kalman filter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2007, 38(9): 1-5. (in Chinese with English abstract)
[17] 张邦成,方勇,王跃光,等. 离合器性能试验台卡尔曼滤波模糊PID控制[J]. 武汉理工大学学报,2009,31(23):151-154. Zhang Bangcheng, Fang Yong, Wang Yueguang, et al. Research on the automobile clutch performance test platform based on Fuzzy-PID control with kalman filter[J]. Journal of Wuhan University of Technology, 2009, 31(23): 151-154. (in Chinese with English abstract)
[18] 王航宇,倪原. 基于卡尔曼滤波器的电动汽车PID控制系统设计[J]. 西安工业大学学报,2008,28(3):267-269. Wang Hangyu, Ni Yuan. Research of PID control system of electric vehicle motor based on kalman filter[J]. Journal of Xi’an Technological University, 2008, 28(3): 267-269. (in Chinese with English abstract)
[19] 陶永华. 新型PID控制及其应用[M]. 北京:机械工业出版社,2003.
[20] 刘浩蓬,龙长江,万鹏,等. 植保四轴飞行器的模糊PID控制[J]. 农业工程学报,2015,31(1):71-77. Liu Haopeng, Long Changjiang, Wan Peng, et al. Fuzzy self-adjusting proportion integration differentiation for eppo quadrocopter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(1): 71-77. (in Chinese with English abstract)
[21] 宋淑然,阮耀灿,洪添胜,等. 果园管道喷雾系统药液压力的自整定模糊PID控制[J]. 农业工程学报,2011,27(6):157-161. Song Shuran, Ruan Yaocan, Hong Tiansheng, et al. Self-adjustable fuzzy PID control for solution pressure of pipeline spray system in orchard[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(6): 157-161. (in Chinese with English abstract)
[22] 洪剑青,赵德安,孙月平,等. 水产养殖自动导航无人明轮船航向的多模自适应控制[J]. 农业工程学报,2017,33(1):95-101. Hong Jianqing, Zhao Dean, Sun Yueping, et al. Multi model adaptive control of paddlewheel vehicle's course in aquaculture[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(1): 95-101. (in Chinese with English abstract)
[23] Rubaai A, Castro-Sitiriche M J, Ofoli A R. Design and implementation of parallel fuzzy PID controller for high-performance brushless motor drives an intetrated invironment for rapid control prototyping[J]. IEEE Trans Industry Application, 2008, 44(4): 1090-1098.
[24] 郭娜,胡静涛. 基于Smith-模糊PID控制的变量喷药系统设计及试验[J]. 农业工程学报,2014,30(8):56-64. Guo Na, Hu Jingtao. Design and experiment of variable rate spaying system on Smith-Fuzzy PID control[J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(8): 56-64. (in Chinese with English abstract)
[25] Kalman R E. A new approach to linear filtering and prediction problems[J]. Transaction of the ASME Journal of Basic Engineering, 1960, 82(3): 35-45.
[26] Zarchan P, Musoff H. Fundamentals of Kalman Filtering: A Practical Approach[M]. Reston: American Institute of Aeronautics and Astronautics, 2009.
[27] 沈法鹏,赵又群,林棻. 基于卡尔曼滤波的车辆侧偏角软测量[J]. 农业工程学报,2013,29(10):71-75. Shen Fapeng, Zhao Youqun, Lin Fen. Soft sensor of vehicle side slip angle based on kalman filter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(10): 71-75. (in Chinese with English abstract)
[28] 王莉,王庆林,陈虹. 状态空间表达下控制系统的稳态误差[J]. 火力与指挥控制,2009(6):28-31. Wang Li, Wang Qinglin, Chen Hong. The steady-state error to control systems in state-space expression[J]. Fire Control & Command Control, 2009(6): 28-31. (in Chinese with English abstract)
[29] 滕青芳. 自动控制原理[M]. 北京:机械工业出版社,2015.
[30] 赵金辉,刘立晶,杨学军,等. 播种机开沟深度控制系统设计与室内试验[J]. 农业工程学报,2015,31(6):35-41. Zhao Jinhui, Liu Lijing, Yang Xuejun, et al. Design and laboratory test of control system for depth of furrow opening[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(6): 35-41. (in Chinese with English abstract)
[31] 农业机械生产试验方法:GB/T 5667-2008[S]. 北京:中国标准出版社,2009.
Design and experiment of automatic leveling control system for orchards lifting platform
Fan Guiju1,2, Wang Yongzhen1, Zhang Xiaohui1,2※, Zhao Jinying3, Song Yuepeng1,2
(1. College of Mechanical and Electrical Engineering, Shandong Agricultural University, Tai'an 271018, China; 2. Shandong Provincial Key Laboratory of Horticultural Machinery and Equipment, Tai'an 271018, China; 3. Chinese Academy of Agricultural Mechanization Sciences, Beijing 100083, China)
Lifting platform for orchards plays a significant role in the fruit industry, because it successfully solves many difficult problems of picking fruit and trimming branches. However, there are some uncontrollable problems such as leveling instability, poor operational capacity in current machines. So it is necessary to design better leveling system to improve their working efficiency and stability. Domestic and foreign scholars have done a lot of researches on the leveling system for high-altitude lifting platforms, which provide important academic reference for the design and improvement of the leveling system for orchards lifting platform. There are higher leveling requirements because of poor terrain in orchards. United States, Australia and Japan are the earlier countries to produce lifting platform for orchards and their devices have achieved the automatic leveling. They are yet too expensive for Chinese farmers to afford. In China, it was not until 1980s that the lifting platform for orchards was made. Some types of the lifting platforms made in China realized mechanical leveling, but their leveling accuracy and working efficiency were lower. To this end an auto leveling control system was designed on the basis of the related information at home and abroad. Such a leveling control system consisted of lifting platform, leveling mechanism, hydraulic system and control system. By analyzing forces and movement of the leveling mechanism of the leveling control system, the dynamic mathematical model for the control system was set up. As we all know, the fuzzy control can decrease the overshoot, and PID (proportion, integral, derivative) control can increase the response speed, and Kalman filter can reduce signal interference. So the fuzzy PID control system with Kalman filter was designed. According to the information collected by inclinometer, the control system makes a decision, and then controls electromagnetic valve to drive the leveling cylinder to extend or retract, which can change the motion of the work platform and keep it level. The results of simulation showed that the performance of fuzzy PID control system was better than that of traditional PID. Firstly its rise time was 0.09 s, it’s peak time was 0.12 s, its regulation time was 0.41 s, and they were respectively shortened by 43.75%, 47.82%, and 48.10%, respectively, which indicated the initial and overall speed of fuzzy PID control system were better. Secondly the maximum overshoot was 17%, which was reduced by 52.78% of traditional PID’s, so fuzzy PID control system realized a good stabilization. Moreover in combination with Kalman filter, the leveling precision of fuzzy PID control system was improved greatly. Its steady state error was about 0.051° and was reduced by 44.57% of PID’s. The experiments were done in different slopes (5.1°, 10.5°, 14.5° and 18.8°) and different loads (0, 50, 100, and 150 kg). The results showed that the performance of automatic leveling system was better compared with the original leveling control system. The response time of automatic leveling control system was shorter and was about 0.078 s. When the platform wasn’t lifted, under the maximum load and the slope of 18.8°, the maximum automatic leveling error was 1.08°, the automatic leveling precision was increased by 1.69°. In the process of the platform lifted, the maximum automatic leveling error was 1.74º, and the automatic leveling precision was increased by 1.91°. In addition, there were some occasional phenomena such as leveling inaccurately and running slowly in the process of experiments. There were following main 3 reasons: 1) Irregular terrain disturbed the signals collected by angle sensors; 2) The workbench deviated from the set position because of hinge clearances; 3) With the action of motion inertia, the workbench swung back and forth when rising or falling too fast. So the following works will be carried out, including modifying the mechanical structure of lifting platform, and researching control algorithm and mathematical model of the control system to improve control accuracy and leveling efficiency. In conclusion, the automatic leveling control system can meet the design requirements and effectively improve leveling degree and work efficiency, and is well suitable for orchards.
algorithms; control; design; lifting platform; auto leveling
10.11975/j.issn.1002-6819.2017.11.005
S233.74
A
1002-6819(2017)-11-0038-09
樊桂菊,王永振,张晓辉,赵金英,宋月鹏. 果园升降平台自动调平控制系统设计与试验[J]. 农业工程学报,2017,33(11):38-46.
10.11975/j.issn.1002-6819.2017.11.005 http://www.tcsae.org
Fan Guiju, Wang Yongzhen, Zhang Xiaohui, Zhao Jinying, Song Yuepeng. Design and experiment of automatic leveling control system for orchards lifting platform[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(11): 38-46. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2017.11.005 http://www.tcsae.org
2016-11-26
2017-05-09
国家“十二五”科技支撑计划项目(2011BAD20B10-2-4);山东省现代农业产业技术体系果品产业创新团队资金(SDAIT-06-12);山东省重点研发项目(2016GNC112006)
樊桂菊,女,山东曲阜人,博士,副教授,主要从事智能农业装备设计与研究。泰安 山东农业大学机械与电子工程学院,271018。
Email:fanguiju2002@163.com
※通信作者:张晓辉,男,山东聊城人,教授,博士生导师,主要从事农业机械设计及理论研究。泰安 山东农业大学机械与电子工程学院,271018。Email:Zhangxh@sdau.edu.cn