坦克装甲车辆综合电子信息系统的总体设计研究
2017-07-10毛明刘勇胡建军
毛明, 刘勇, 胡建军
(中国北方车辆研究所, 北京 100072)
坦克装甲车辆综合电子信息系统的总体设计研究
毛明, 刘勇, 胡建军
(中国北方车辆研究所, 北京 100072)
车辆综合电子信息系统(简称车电)是坦克装甲车辆平台信息化的基础和核心,直接影响坦克装甲车辆信息化水平和战术性能。由于对其兼具信息化总体和车电功能系统双重角色的内涵认识不清晰,车电发展受到一定制约。阐明了车电系统本质内涵,得出“坦克装甲车辆综合电子信息系统的关键在于综合”的结论,并通过梳理、分析车电技术的发展进程,凝炼了传感综合、显控综合、席位综合、处理综合与信息综合等重点,提出车电系统的关键技术、总体设计流程及仿真建模方法,为坦克装甲车辆综合电子信息系统发展提供借鉴。
兵器科学与技术; 坦克装甲车辆; 综合电子信息系统; 架构; 任务; 综合
0 引言
联合作战,特别是机械化与信息化深度融合是包括坦克装甲车辆在内的武器装备发展的紧迫内在需求,综合电子信息系统是实现武器装备信息化的物化表现,也已成为武器装备最重要的系统之一。如果将发动机比作“心脏”,那么综合电子信息系统就可以比作装有一定“知识”,并具备一定“聪明程度”的“大脑”。综合电子信息系统的发展不仅得益于信息技术本身的飞速发展,而且也得益于武器装备需要处理的信息越来越多和武器装备对质量、空间的限制越来越苛刻。综合电子信息系统率先在飞机上(简称航电)得以蓬勃发展[1-2],随后在坦克装甲车辆(简称车电)、舰船、导弹上陆续得到重视和发展。车电是坦克装甲车辆平台信息化的基础和核心[3],是实现坦克装甲车辆由机械化向信息化跨越式发展的基本技术途径,是新型坦克装甲车辆的主要技术特征和重要标志。车电对外通过射频连接战场上各级、各类通信与环境感知设备[4],对内综合坦克装甲车辆本身的火力、防护、机动等系统以及乘载员的显示和操控信息,既是战场信息的基本感知单元和信息源,也是协同作战体系形成机动力、防护力、打击力和持续作战能力的桥梁和枢纽。车电既是实现坦克装甲车辆信息采集、传输、处理、存储和显控的电子信息平台,也是信息综合运用的核心所在;不仅包含计算机、总线、显示器等硬件,还包含控制策略、辅助决策、任务规划等软件[5]。车电既可以成为火力、机动力、防护力的“倍增器”,也可能将是系统复杂、价格昂贵的“花架子”,更糟糕的甚至成为可靠性差、让人束手无策、虚警不断的“麻烦制造者”。
车电技术是借鉴航电技术同步发展的,与航电发展历程[6-9]类似,车电技术经历了分立式、联合式到综合化的发展历程。
早期,坦克装甲车辆信息系统采用分立式系统结构[10],由于缺乏统一的总线技术和核心计算机技术,各个电子设备分离安置,未实现互联互通。因此,车辆上互联电缆繁多,质量大,且乘员要面对的显示和控制装置繁多,操作复杂。
随着坦克上装载的电子设备种类和数量不断增加,互联接口、布局布线越来越复杂[11],为了解决系统间信息交互能力不足和扩展能力较弱的问题[12],美军M1A2和德国豹Ⅱ等以计算机为中心的联合式车电系统[13]设计渐渐成为主流。其特点在于通过统一总线网络实现子系统间的互联互通[14],但各系统的资源和功能仍然相互独立。
信息化战争和技术的发展使坦克承担的任务进一步多样化和复杂化,感知能力、打击手段和防护技术日益电子化、智能化。为解决光电、射频设备占用空间与质量持续增长、经济成本居高不下、维护困难等突出矛盾,信息系统进一步发展为综合式系统结构[15]。综合式信息系统是一个高度开放的实时计算系统,致力于支持不同重要程度级别的系统任务程序,适合构造一种规模可变的系统[16-17]。它以交换式高速数据网络为主传输通道,利用分层和分区来隔离信息系统组件和软件[18],使不同的应用程序驻留在通用的硬件平台上,能够有效支撑系统数字化、模块化、标准化、通用化的硬件体系架构,并通过裁剪或扩展功能模块,满足武器装备执行各种任务的需求。综合式车电系统架构具有以下优势:采用开放式的标准化体系架构,减少了标准化模块种类和备用部件数量,降低了维护成本;开放式体系更易于系统集成、维护和技术升级;软件与硬件分离,方便移植和重用[19];支持不同安全性需要;能够优化计算、通信和I/O资源,通过统一规划分配系统资源,实现资源共享、减少部件数量等[20]。
我国车电技术经过近几十年的发展,使装甲装备初步实现了统一指控、态势共享、协同攻防、综合保障等信息化功能, 随着车电地位和作用的显著提升,坦克装甲车辆各分系统数字化、自动化水平明显提高,车电技术的发展到了一个转型升级的关键时期。本文试图阐明对车电系统本质内涵的认识,提出车电系统的关键技术和总体设计流程及仿真建模方法,为车电技术的进一步发展提供参考。
1 车电系统的组成与本质内涵
车电系统往往表现为总线拓扑结构图,如图1所示为美国M1A2主战坦克车电系统的拓扑示意图。
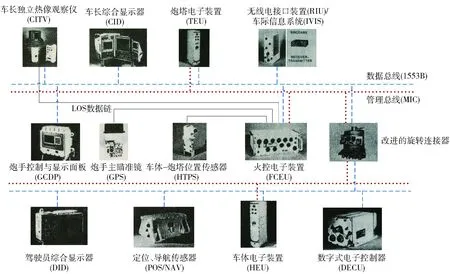
图1 美国M1A2主战坦克车电系统的拓扑示意图[21]Fig.1 Topological graph of vetronics system of M1A2 main battle tank[21]
从总线拓扑结构图的形式,人们往往简单地将车电系统理解为信息采集、传输、处理、存储和显控的电子系统,认为只要掌握计算机或总线等电子信息技术就能胜任车电系统的设计,特别是美国未来战斗系统(FCS)由波音公司和国际科学应用公司而不是通用动力公司作为总承包商牵头集成更是强化了这一偏见。
事实上,总线拓扑图(车电系统架构)只是车电系统的外在表现形式,而为什么要采用这个架构以及运行在其中的软件才是内容。车电系统设计首先是一个总体顶层设计问题,涉及到对坦克执行诸如进攻作战、防守作战、集结机动、潜伏监视、演习训练、维修保障等作战训练任务的理解,与上一级战场指挥保障信息系统的协调,以及车长、炮长、驾驶员的协作分工和坦克各分系统的自动化信息化程度。因此,由于车电技术的加入,使得传统意义上以战术技术指标分配,性能、参数匹配,空间位置布置,各分系统机械、电气、信息接口协调为主要工作的坦克总体设计(可以称为“机械化总体”)必须发展成以任务综合、功能综合、信息综合、显示综合与操控综合为主的“信息化总体”。
车电系统的设计包括两部分:一部分是基于任务管控的坦克总体信息设计与集成,完成人机之间和分系统之间任务、功能与信息的分解和综合,设计车电系统架构、设计规范以及车电系统的集成;另一部分是各车电功能系统的设计,完成任务管理与辅助决策系统、通信与定位系统、以及执行信息采集、传输、处理、存储和显示功能的通用电子平台等软硬件的设计。
基于任务管控的坦克总体信息设计与集成是“信息化总体”的主要工作内容[22],必须由坦克系统总体设计人员来完成。其核心包括如下4个方面:
1)根据坦克作战使命任务进行人机之间功能分配与信息设计。在规定的任务剖面下,人做什么,机器做什么,坦克乘员间如何分工,乘员操控的作业流程是什么,通过在车电顶层设计时与坦克需求方逐一明确这些问题,把坦克作战使命任务落实到坦克乘员的操控使用上,以实现任务需求到技术需求的转变。
2)坦克(人机中的机)任务、功能的分解和信息设计。需要坦克本身完成的任务、功能又如何分配到各分系统,各分系统之间又如何协作协调。目前,主战坦克有100多个独立的电子部件,它们往往需要一些相同的信息,比如车速信号,发动机、传动装置、行动系统、火控系统、光电对抗系统都需要,信息存储、处理等资源是可以共用、共享,就像云计算一样。总体设计的任务就是要在全面了解分析的基础上提出各分系统之间功能的综合和分配的要求,通过系统之间信息功能与接口设计,实现整车的电子信息要求到分系统技术要求的转变。
3)根据整车电子信息功能和各分系统功能,设计整车信息系统架构,包括系统管理架构、软件架构、硬件架构、网络架构等,同步提出设计规范,明确部件之间、模块之间、软件与硬件之间、软件与软件之间的功能、物理接口和信息接口及其集成测试规范。
4)建模、仿真、集成与验证,根据装备作战使命任务,搭建动态仿真测试验证环境,实现对车电总体方案以及车电功能系统的仿真集成和验证。
车电功能系统的设计是在上述4个方面的工作完成后开展的设计工作,核心是为完成坦克作战使命任务提供信息服务,主要包括任务管理与辅助决策系统、通信与定位系统和通用电子平台。
任务管理与辅助决策系统完成坦克的任务管理、辅助决策以及坦克本身状态的综合管理。它包含任务规划、多源情报信息融合、辅助决策、系统综合管理和乘员显控等功能。
通信与定位系统完成坦克与战场指挥与控制信息系统之间和坦克内各乘员之间的通信、坦克本身的定位。包含通信系统、卫星定位系统和惯性导航系统等,实现车际之间以及车内乘员间的通信与位置服务。
通用电子平台为任务管理与辅助决策系统、通信与定位系统以及火力、机动、防护等各分系统提供通用化、模块化的信息采集、传输、处理、存储、显示的软硬件服务环境。包含任务信息管理网络、控制网络、通用处理计算机、乘员终端等,实现信息传输、处理、存储和显控等通用服务。
从以上关于车电系统设计的主要内容可以看出,车电系统的本质是对坦克作战使命任务的解析与管理,以及实现各分系统信息采集、传输、处理、存储、显示的集中统一管理。车电系统的设计既是坦克总体设计的核心,也是车电功能系统的软硬件设计,其设计水平直接关系到坦克综合作战效能。随着未来战争朝着联合作战、体系对抗、透明战场等形态的演进,任务管理越来越复杂,信息越来越多,车电系统的设计也越来越复杂,总体设计的层级也会越来越高。
2 车电系统的关键在于综合
车电系统的根本是适应装备信息化、智能化作战使用的需求,适应装备空间质量的要求,适应装备维护保障的要求,为此,需要从坦克装甲车辆任务出发分析车电系统总体设计的综合重点,从车电系统功能需求研究车电体系架构,并明确支撑车电系统综合的关键技术。
2.1 车电系统总体设计的综合重点
车电系统总体设计核心思想是基于对坦克作战任务的理解,来分解、分配、设计坦克信息的功能与接口,重心在于使坦克装甲车辆乘员能简洁、全面、快速地感知战场、理解态势、掌握平台、使用武器,达到正确决策,准确完成任务的目标。为了支撑这一目标,首先需要做好传感综合、席位综合、显控综合和信息综合,使乘员在合理任务负荷情况下快捷发现、识别、跟踪目标;其次通过处理综合,使各功能系统有效协调运行,高效完成乘员意图。
2.1.1 传感综合
随着战场环境日益复杂,车辆任务与功能逐渐增加,战场感知手段多样化,使得传感器日益增多,必须通过传感综合[23]来满足总体空间和质量的约束。传感综合包括了射频综合与光电综合。
1) 射频综合
为了适应未来战争中对探测与通信的需求,必须加装兼具战场态势感知、近程防护、电子对抗、敌我识别、宽频谱智能协同通信的各类射频传感器。而目前传统车辆内部的传感器都是单独安装,如果按照功能累积的思路、架构进行发展,车外独立安装的天线数量及车内处理单元数量将会成倍增加[24]。
首先是射频前端与处理的集成。通过射频天线、射频前端收/发通道、信息处理与控制等资源的共用,实现雷达、电子对抗、通信导航及敌我识别多任务的统一管理、控制和调度。
其次是射频资源的规划、频谱共用与复用。综合射频系统涉及多种频段、多种功能、多种信号形式的综合电子信息系统,其中包括工作于同一频段的不同功能部分,因此通过规划、共用和复用,实现多个功能、多个孔径在时间、空间、频段上的统一管理调度,就非常重要。
最后是射频综合探测。射频综合探测的主要功能是完成对低空、地面目标的监视和跟踪,结合坦克装甲车辆的使用工况,发挥其搜索速度快、扫描范围广的特点,灵活设计探测系统的工作模式,综合提高其战场主动探测能力。
2) 光电综合
光电综合从战场观察和目标搜索与瞄准需求出发,通过分布式感知的综合,提供1 km范围内的全景实时快速感知,实现透明座舱,满足装甲平台需要高速编队行军、城市作战、遥控武器观瞄等近距离全景态势观察能力需求;通过多频谱搜索瞄准综合,实现5 km地面目标、10 km低空目标的自动探测和高精度的自动跟踪瞄准,达到先敌发现、先敌打击的快速打击目的。
2.1.2 席位综合
随着无人车辆技术的发展和以乘员为中心的装备发展需求,未来坦克装甲车辆必将实现席位综合,逐步由现在的3~4乘员发展到2乘员,再发展到单乘员。
在目前主流的装甲装备中,大部分是驾驶员、车长和炮长3乘员通过互相配合,共同完成机动驾驶、火力打击和光电对抗,以及用于支持这3项功能的目标搜索、信息处理、车际通信等工作。随着技术水平的提高,未来坦克装甲车辆改为2乘员后,必须重新规划人机功能并进行2乘员任务分配。美国早在FCS中就进行了席位综合与乘员任务负荷分析的研究。
有3种较为可行的2乘员任务分配方案:驾驶员- 车炮长、驾驶员(车长)-炮长、驾驶员(炮长)—车长。要完成乘员任务分配,首先需要根据辅助决策与人工智能技术的进展,确定人机功能分配,尽量由机器完成以前乘员重复度高、负荷大的操作,如目标自动搜索与识别等。
2.1.3 显控综合
随着感知技术和信息技术的发展,乘员需要感知和处理的信息量有巨大的增加,对乘员的显控提出了更高的要求,对乘员间的协同产生了更高的需求。在复杂交互环境下,坦克装甲车辆操作程序的复杂度直接关系到任务能否得到正常、有效地执行。因此,以乘员完成任务为中心,以提高任务完成效率为目标,将乘员的显示界面、操控设备等显控资源进行综合,基于任务将显控功能进行有机的组合和设计,并利用先进的信息技术实现更高程度的人机结合,从而提高坦克装甲车辆乘员的人机交互手段和交互方式,以提高坦克装甲车辆的作战效能和可用性,增强乘员的态势感知能力和决策能力,减少决策和反应时间,降低操作误差。
2.1.4 信息综合
信息综合是指多源信息的综合利用,对于坦克装甲车辆主要包括战场态势信息融合和协同指挥控制两部分。
1) 信息融合技术
未来坦克装甲车辆所装备传感器类型和数量的成倍增长,直接导致产生的多源异构信息种类与信息量爆炸式增长。目前,军事领域多传感器目标关联融合、定位和跟踪技术已基本成熟,但对地面目标的跟踪技术尚未成熟,并且随着目标性能(机动、隐身防护等)的提高不断出现新的亟待解决的问题。对于多源目标属性融合识别问题,由于不同类型信息源获取的目标属性信息粒度(敌我、国籍、类型、型号等)存在较大差异,信息级别也存在较大差异(信号级、数据级、特征级、判定级等),并且信息之间有时存在弱相容或相悖性,因此,无法构建统一的物理识别模型和统计识别模型,更缺乏统一的理论和方法支持;自动识别只能限于局部特定的范围,而智能识别则需借助于人机交互。战场态势与威胁评估知识/规律的提取与精炼是目标(状态与属性)融合估计对作战决策整体支持能力的提升,由于涉及到对诸战场目标之间及与其他态势要素之间关系的估计与预测,并且要与作战意图紧密联系,因此,更是十分复杂且与指挥员的能力(知识、理解与智慧)相关的一个领域。作为实现态势自动估计与推理的信息融合技术,由于其信息来源存在多样化和不确定性的特点,尚未有一个成熟的、统一的理论与方法,只在威胁估计的某些局部领域,有一些定量或定量与定性相结合方法的应用。至于融合过程的精炼与优化,目前还只限于提出研究思路的层面上。总体来看,基于地面开放环境下的信息融合技术还不够成熟,是一个制约坦克装甲车辆态势感知能力提高的关键技术。
2) 协同指挥控制
面向未来基于体系的联合化协同作战,应实现坦克装甲车辆车际车内一体化融合设计,包括指控信息、态势信息与坦克装甲车辆平台的融合,以及战场信息与平台信息的融合显示等,将作战分队中各平台的武器系统、防护系统、机动系统、乘员等通过车际和车内网络有机地连接为一个虚拟的“大坦克平台”,通过大平台内各子系统和设备的协同,实现作战分队的综合控制和分队的指挥控制自动化,使作战分队和其中的每个武器装备都能够真正成为联合作战体系中的一个重要的感知节点、打击节点和防护节点,进而为乘员和指挥员完成任务构建游刃有余的信息运用环境,提高作战分队的作战效能。
而且,未来战场上的协同,不只是基于预先方案的协同,还是全作战过程中的实时协同,应该能够根据战场态势的变化,实时地进行协同。信息系统应该能够根据坦克装甲车辆作战分队中各组成的能力和战场环境,对协同任务进行科学、合理的分解与分配,并在执行任务过程中,根据环境的变化,动态地对任务进行调度,以保证系统能高效地完成复杂的作战任务。
2.1.5 处理综合
未来坦克装甲车辆通过网络化感知、控制、打击、防护,实现全维态势感知、一体化指挥控制、实时协同作战、精确打击、精准机动、综合保障的高度融合。而这种融合必将打破传统各分系统的界限,由分布式控制管理向集中管理、分布控制的高度综合化过渡。一方面将继续大幅度提高信息处理和使用的能力;另一方面将实现系统功能的高度综合集成,提升系统功能扩展、自动化综合管理和诊断能力。这些均需要构建一个开放式的通用软硬件平台,进行诸多控制与管理功能的综合处理,进而实现以下能力:
1)功能软件化。越来越多地利用软件取代原来由硬件实现的功能, 所有应用程序共享硬件资源,减少配置子系统个数,节省质量、空间、成本, 提升资源利用率, 并为后续扩展预留空间。
2)网络统一化。统一车电任务网络和控制网络, 改变联合式结构中多种数据总线并存的格局, 有助于降低成本、减轻系统质量、提高数据传送速度。
3)调度灵活化。将应用程序进行细粒度划分, 采用周期轮转或优先级抢占调度策略,确保每个应用程序或安全关键程序的截止期限得到满足。
2.2 未来车电系统的体系架构
车电系统体系架构经历了独立式、联合式、综合式的发展历程,综合化程度越来越高。但随着坦克装甲车辆任务负载多样化和能力要求全面化,综合的规模也越来越大。同时,坦克装甲车辆无人炮塔和轻量化的要求对空间和质量的限制越来越严,可靠性、安全性要求越来越高,需要有效平衡综合规模和空间限制、可靠性和安全性的矛盾。为此,基于分布综合的思想。本文提出车电系统是模块化分布式集成车电系统(DIMV)体系架构,具体如图2所示。
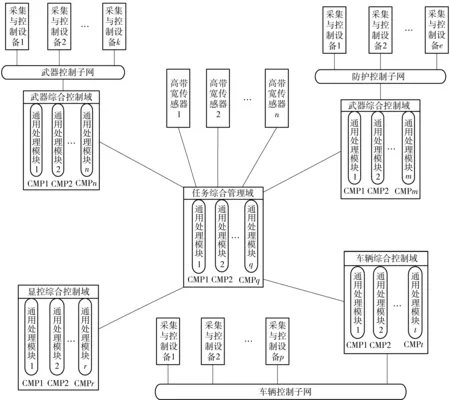
图2 分布式集成车电系统结构图Fig.2 Distributed integrated vetronics system
DIMV由按区域和功能分布的不同功能域及其所属的控制子网、任务综合管理域以及相关高带宽传感器等组成,基于系统区域组织的分布式架构形成区域组织管理模式,实现基于虚拟核心平台的系统管理、功能和资源综合。该架构具有以下5个特点:
2.2.1 采用统一复合网络,实现车载信息系统的互连、互通和互操作
本架构采用统一复合网络,整车骨干网[25]采用全车统一的交换式高带宽光纤网络,连接分布式功能域、任务综合管理域、高带宽光电传感设备等各类需要高带宽数据交换的设备。每一类型设备配置的数量可根据具体车型需求选择。由于各设备之间通过对等的交换式网络互联,通过动态路由管理,能够实现各类信息在所有节点之间的自由交互,且同一类型设备之间可互为冗余备份,为系统任务综合与功能重构创造了基础条件。例如,通过交换式光纤网络,任一光电传感设备采集的视频信息可传递到任一乘员显示终端进行显示,也可同时传递到任一分布式处理单元进行目标识别等图像处理运算,实现光电资源综合、显控资源综合、运算处理资源综合。此外,交换式网络具有较强的系统开放性,网络节点的增减对整个网络信息流和网络性能影响微小。
2.2.2 采用基于功能分区的功能子网,提高系统安全关键性功能的可靠性
根据以功能为主的划分原则,为各子系统配置若干功能子网,通过网关形式与整车统一复合网进行信息交互。功能子网一般连接分布式功能域与若干采集控制设备,实现子系统传感器采集、执行部件控制与子系统功能综合。功能子网主要按实现某一特定功能的子系统进行划分(如武器控制子网、防护控制子网、车辆控制子网等)。
2.2.3 通过物理分布的方式,有效解决系统的体积和质量问题
DIMV架构针对坦克装甲车辆基于物理分布的思想,采用物理上分布布置的多个分布处理单元,通过高速总线网络互连,构成整车的运算处理平台。该种方式与传统集成了所有功能模块的“大而全”的计算机相比,具有体积小、质量轻等优点。
2.2.4 通过资源综合,提高系统的开放性
在DIMV架构中,将物理分布在平台不同位置的分布处理单元,通过统一的高速总线网络相连,实现硬件资源的共享,使全车所有运算处理资源在逻辑上融合为一个统一整体,实现了整车的运算处理资源综合、显控资源综合、传感资源综合、射频综合和各子系统的功能综合。在系统运行过程中,能够根据任务和功能需求灵活分配各功能或任务占用的资源。
2.2.5 通过高速交换光纤网络,满足未来图像和高带宽传感器的海量数据传输需求
DIMV架构针对未来坦克装甲车辆的图像和大带宽传感数据传输提供了数据网络,通过高速互连总线网络将高清摄像头、雷达等大带宽传感器、乘员显控终端以及处理设备等连接在一起,能够实现任一高清数据流实时地传输至任一乘员显控终端或存储、处理设备。
2.3 支撑车电系统综合的关键技术
2.3.1 辅助决策技术
随着坦克装甲车辆作战任务越来越复杂、需要处理的信息越来越多,乘员在紧张的作战过程中需要进行的思考、决策等也相应增多,但高度紧张的作战过程中又要求乘员尤其是指挥员必须在最短的时间内作出正确的决策。辅助决策技术是一个有效的途径,利用计算机技术、人工智能技术等,可以充分利用大量的战场态势、情报、车况等信息,自动进行机动路线规划、自动驾驶、目标威胁评估、打击防护决策、火力分配等[26],乘员或指挥员只需要在计算机生成方案的基础上,进行选择作出决策即可,能够大大降低乘员的任务负荷,极大地提高坦克装甲车辆的作战效能。
2.3.2 人工智能技术
随着作战模式向网络战、信息战方向转变,利用人工智能技术,实现坦克装甲车辆的智能化,使其成为一个智能集群,是坦克装甲车辆的一个重要发展趋势。人工智能可分为计算智能、感知智能和认知智能3个层次。利用计算智能,坦克装甲车辆可辅助乘员进行部分作战指挥决策,辅助乘员完成复杂的作战任务;利用感知智能,可实现自然语言理解、图形图像识别等功能,能够为乘员提供一种更加友好、更加人性化的人机交互方式和信息融合手段;更进一步,如果能够实现认知智能,计算机具有一定的“智力”,能够实现乘员与计算机之间“知识”的交互和融合,从而能够理解战场态势并自动进行决策,将在更大程度上解放乘员,实现坦克装甲车辆的智能化。
2.3.3 通用电子平台技术
通用电子平台为武器、防护、车辆综合控制和任务综合管理提供通用的软硬件处理平台,通过统一的技术体制和标准软硬件,实现装备平台资源、信息、功能和任务的高效有机融合。进行功能模块化、标准化、通用化设计,通过模块化硬件层和构件化软件层的结合,满足装备标准化、可靠性以及成本、空间和质量等方面的要求。
通用电子平台的核心是模块通用化和软件构件化。功能模块包括通用信息模块、通用信号处理模块、大容量存储模块等,所有模块的结构、电气、通信接口应保持一致,相同功能模块可以相互替换,其功能由动态加载的应用软件确定。通过中间件技术,应用软件构件独立于功能模块硬件,便于实现软件功能的快速开发和移植,也使其不受硬件平台更新升级的影响。
2.3.4 软件无线电技术
坦克装甲车辆与各军兵种的互联互通是体系化协同作战的必要条件和信息综合的重要基础。装备之间存在不同程度的通信不兼容问题,无疑会降低部队执行作战任务的能力,软件无线电是解决通信问题的重要技术途径。软件无线电的组成架构的中心点是将宽带模- 数(A/D)和数- 模(D/A)转换器尽可能地靠近天线,将尽可能多地电台功能以软件的形式定义(即用软件来实现),这就意味着同样的硬件可以在不同软件支持下完成不同的功能。无线电系统的功能性要求由软件来实现,而不是由硬件来决定。在同一无线电系统中,通过多种软件模块的实现来适应不同通信体制下的信息交互,并可以灵活地接入新功能,而无需硬件组件的更新或升级。软件无线电标准在2012年正式发布了SCA4.0. 坦克装甲车辆软件无线电的关键是根据其任务需求和互联互通要求,对SCA 4.0组件进行合理裁剪,提出坦克装甲车辆软件无线电规范,并在国产化硬件平台上设计出符合规范的商用货架产品。
3 基于模型的车电系统总体设计方法与流程
在采用高度综合的车电系统架构后,需要有新的车电系统总体设计方法和流程,支撑高效的车电系统总体设计和动态综合。
在坦克装甲车辆领域,美国FCS地面车辆非瞄准线火炮(NLOS-C)采取了以模型为中心的乘员操作界面设计、功能分解、信息接口分解、系统开发和系统集成验证的开发流程。NLOS-C研发人员首先通过乘员操作界面设计,明确乘员任务分工和各系统所需操控和显示,并通过分析乘员操作的信息流进行各系统功能分解,确定各系统的信息接口。通过后续的系统开发和系统集成效果来看,其信息总体设计非常成功,系统之间非常顺畅完成了综合集成与验证。同时,NLOS-C项目采取了基于模型的设计方法,在各个设计阶段都根据建立的任务模型、信息流模型和控制模型进行数字或半实物仿真,而且很好地完成了在设计阶段的验证以及系统综合时模型的再利用,使得系统开发周期大为缩短,仅花了一年半的时间就研制出样机并通过试验验证。基于模型的系统设计方法特别适合于功能繁多、组成复杂、信息交互耦合度很高的复杂系统的总体设计。
基于模型的系统工程(MBSE)方法论支持在 “模型驱动的”[27]环境中综合集成系统工程学科的诸多相关流程、方法和工具,建立和传递的“模型”包含需求、结构、行为和参数在内的动态信息。“模型”使整个组织中各类专业工程技术领域人员更加直观地理解和表达系统,确保全程传递和使用的是基于同一模型。同时,研制过程中发生的任何工程更改,都能保证在同一个基线修改和再次刷新并传递,从而支持了在复杂系统工程中,需求不断变化和演进,以及过程不断迭代和优化的渐进演化。
Harmony 系统工程方法[28]是基于模型的系统设计方法中较为著名的一种系统工程方法,它支持自顶向下的系统工程和软件工程,是集合了系统工程的分析、设计、验证和确认的方法学。Harmony系统工程方法流程强调设计过程中的迭代、验证和确认,使用系统建模语言(SysML)[29]和统一建模语言(UML)[30-31]作为图形化的建模语言完成从系统工程到软件工程的无缝集成。
如图3所示,Harmony 系统工程方法遵循了系统设计的经典“V形”生命周期开发模型。即自顶向下的系统设计和自下而上的集成验证,包括了需求分析、系统功能分析和设计综合3个部分。它实现以下的关键目标:
1) 识别/导出所要求的系统功能;
2) 识别相关系统的状态和模式;
3) 将系统功能/模式分配到物理架构。
以Harmony 系统工程方法为基础,结合车电系统的设计特点,坦克装甲车辆信息系统的总体设计可以采用模型驱动的设计方法,进行系统分析、设计及验证,以可视化的模型为手段,实现自顶向下增量设计,自底向上集成验证,各层同步迭代验证的“V形”模式设计过程,如图4所示。
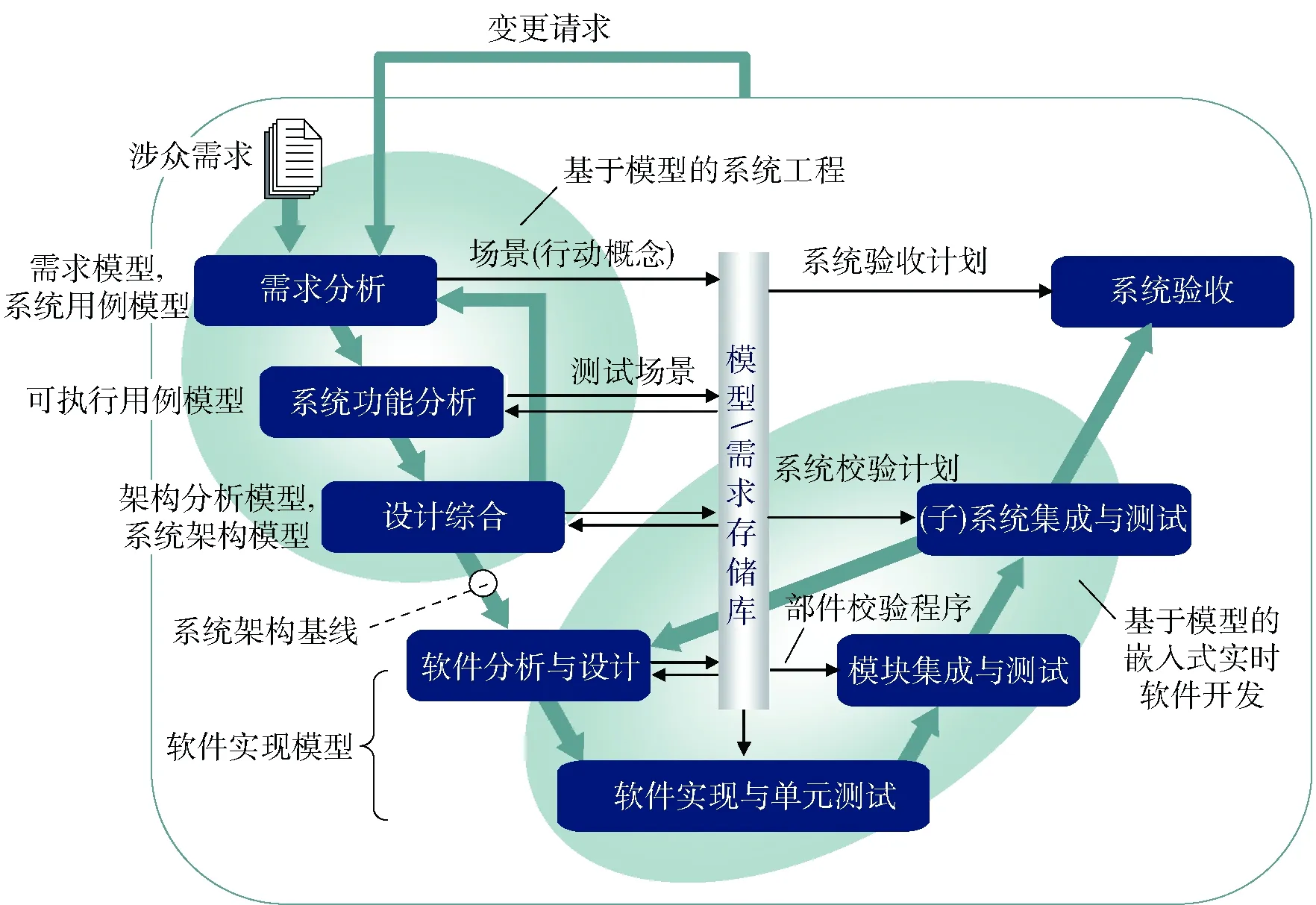
图3 基于MBSE的“V形”模式设计流程Fig.3 MBSE-based V mode design procedure

图4 基于SysML的车电系统设计方法Fig.4 SysML-based vetronics design method
在系统需求分析阶段,总体设计人员对用户需求进行分析,形成系统需求和系统用例模型即车辆任务模型,并将其在需求与模型知识库中管理,从而得到系统需求。需求分析阶段的输出包括:用例模型、系统需求规格说明书草案。
在顶层设计阶段,根据需求模型和任务模型,得到可执行的系统模型,包括系统的活动图、时序图和状态机,分别对应为信息系统的功能模型、信息流模型和状态机;然后可生成系统详细需求规格说明书,通过需求与模型知识库进行管理。顶层设计阶段的输出包括:系统可执行模型、更新的系统需求。
在详细设计阶段,以实现系统最优为目标进行架构分析,得到信息系统架构模型,然后进行功能分配,并设计系统内部的信息流。以系统架构分解为基础,在接口控制文件(ICD),设计阶段输出信息系统的逻辑接口。最终得到分系统架构模型、逻辑ICD以及分系统/部件需求规格说明书。系统建模设计过程中同步开展乘员操作程序(COP)设计,完成系统界面的设计和开发,并通过原型界面与系统模型的联合仿真,演示系统的工作流程并验证系统的功能逻辑和数据流的有效性和正确性。
模型驱动的车电系统设计方法既从设计流程上解决了层次不清晰、功能未解耦等问题,又充分地利用了标准建模语言SysML的优点;既清晰规范地描述了系统,又对系统模型进行了仿真验证。
4 结论
车电系统的关键在于综合,核心在于基于任务的总体设计。本文从车电系统的概念内涵、组成、车电技术的发展历程出发,系统介绍了基于模型的车电系统总体设计方法与流程,凝炼出坦克装甲车辆车电系统的总体设计重点在于传感综合、显控综合、席位综合、信息综合与处理综合,同时提出未来车电系统综合的一般架构——模块化分布式集成车电系统架构DIMV和支撑综合的关键技术。第一次明确提出车电系统的总体设计是坦克装甲车辆总体设计的核心,是所谓“信息化总体”的重要组成。采用基于模型的设计方法,以综合为主导,以模块化分布式集成系统为架构,是未来车电系统总体设计的基本思路与方法基础。按照本文提出的车电系统总体设计的理念、思路和方法,不仅可以提升坦克装甲车辆的信息感知能力、运用能力和作战效能,还能有效控制整车质量、成本,保证系统有较好的重用性和移植性。
随着电子信息技术的发展,综合的形态必将进一步扩展,例如传感的激光综合、网链综合、信息的跨平台体系化综合等,需要紧密跟踪技术发展和装备任务需求,适时进一步提升车电系统的综合程度。
References)
[1] Collinson R P G. Introduction to avionics systems[M]. Netherlands: Springer Science & Business Media, 2013.
[2] Spitzer C R. Avionics: elements, software and functions[M]. US: CRC Press, 2016.
[3] 任友银.现代战争与军事通信[J].兵器知识, 2002(11):44-45. REN You-yin. Modern warfare and military communications[J]. Ordnance Knowledge, 2002(11):44-45.(in Chinese)
[4] Headquarters of the Department of the Army. Tactics, techniques, and procedures for the tactical Internet (FBCB2)[M]. Washington DC, US: Department of the Army, 1997.
[5] Endsley M R. Designing for situation awareness: an approach to user-centered design[M]. Boca Raton,FL,US: CRC Press, 2016.
[6] Spitzer C R, Uma F, Thomas F, et al. Evolution of avionics: safety and certification[M]. 3rd ed. Boca Raton,FL,US:CRC Press, 2014.
[7] Blasch E, Paces P, Kostek P, et al. Summary of avionics technologies[J]. IEEE Aerospace and Electronics Systems Magazine, 2015,30(9):6-11.
[8] Satwat N E, El-Dakroury M, Zekry A. The evolution of aircraft data networks[J]. International Journal of Computer Applications, 2014, 94(11):27-32.
[9] Watkins C B,Walter R. Transitioning from federated avionics architectures to integrated modular avionics[C]∥2007 IEEE/AIAA 26th Digital Avionics Systems Conference. Dallas, TX, US:IEEE, 2007.
[10] 张豫南,谢永成.装甲车辆电气与电子系统[M].北京: 国防工业出版社, 2003. ZHANG Yu-nan, XIE Yong-cheng. Electrical and electronic systems of armored vehicles [M]. Beijing: National Defense Industry Press,2003. (in Chinese)
[11] 宋小庆. 军用车辆综合电子系统总线网络[M]. 北京:国防工业出版社,2010. SONG Xiao-qing. Military vehicles integrated electronics systems bus networks[M]. Beijing: National Defense Industry Press,2010.(in Chinese)
[12] 曹宏炳、程树康. 战斗车辆计算平台数据传输体系结构[J]. 兵工自动化, 2010, 29(9):52-55. CAO Hong-bing, CHENG Shu-kang. Data transmission architecture of combat vehicle computing platform[J]. Ordnance Industry Automation, 2010, 29(9):52-55.(in Chinese)
[13] 乔文昇.装甲车综合电子信息系统设想[J].电讯技术,2007, 47(4):87-90. QIAO Wen-sheng. The idea for designing integrated electronics information system for armored vehicles[J]. Telecommunication Engineering, 2007, 47(4): 87-90.(in Chinese)
[14] 彭真明,朱宗平,饶劲松,等.新型车辆综合电子系统发展设想[J].车辆与动力技术,2010, 117(1):1-5. PENG Zhen-ming, ZHU Zong-ping, RAO Jin-song ,et al. Development prospect of the vehicle's new integrated electronic system[J]. Vehicle and Power Technology, 2010, 117(1): 1-5.(in Chinese)
[15] 熊华钢,王中华.先进航空电子综合技术[M].北京:国防工业出版社.2009. XIONG Hua-gang, WANG Zhong-hua. Advanced avionics integration techniques[M]. Beijing: National Defense Industry Press, 2009.(in Chinese)
[16] Luo R L,Guo Z . Development of the F-35 avionics system[J]. Ship Electronic Engineering,2012, 87(3):54-60.(in Chinese)
[17] 霍曼,邓中卫.国外军用飞机航空电子系统发展趋势[J].航空电子技术,2004,35(4):5-10. HUO Man, DENG Zhong-wei. Development trend of foreign military avionics[J]. Avionics Technology, 2004, 35(4): 5-10.(in Chinese)
[18] Prisaznuk P J. ARINC 653 role in integrated modular avionics (IMA)[C]∥IEEE/AIAA Digital Avionics Systems Conference. St Paul, MN, US: IEEE, 2008.
[19] Gavin P, Mike K U K. MoD land open systems architecture and coalition interoperability with the U.S.[C]∥Proceedings of SPIE 8742, Ground/Air Multisensor Interoperability, Integration, and Networking for Persistent. CA, US: SPIE, 2013.
[20] Wang G Q,Gu Q F. Research on distributed integrated modular avionics system architecture design and implementation[C]∥IEEE/AIAA 32nd Digital Avionics Systems Conference. NY, US: IEEE, 2013.
[21] 陈正捷,陈志昊,张浅秋,等.坦克电子综合化[M].北京:兵器工业出版社,2006. CHEN Zheng-jie, CHEN Zhi-hao, ZHANG Qian-qiu, et al. Integration of the tank electronics[M]. Beijing: Publishing House of Ordnance Industry, 2006.(in Chinese)
[22] 刘勇,李志强.从需求出发提升装甲车辆综合电子研制水平[J].车辆与动力技术,2005, 99(3):59-62. LIU Yong, LI Zhi-qiang. Improve the development level of the integrated electronics on the armored vehicle from the considerations of requirements[J]. Vehicle and Power Technology, 2005, 99(3):59-62.(in Chinese)
[23] Mitchell H B. Multi-sensor data fusion: an introduction[M]. Heidelberg, Germany: Springer Science & Business Media, 2007.
[24] 景博, 张劼, 孙勇. 智能网络传感器与无线传感器网络[M]. 北京: 国防工业出版社, 2011. JING Bo, ZHANG Jie, SUN Yong. Intelligent network sensor and wireless sensor network[M]. Beijing: National Defense Industry Press,2011.(in Chinese)
[25] Hank P,Vermesan O,Keybus J V D,et al. Automotive ethernet: in-vehicle networking and smart mobility[C]∥The Conference on Design, Automation and Test in Europe. Alpexpo Grenoble, France: IEEE, 2013.
[26] Li T,Liu P Y,Ke Y. Battlefield awareness network research based on intelligence role division and wireless sensor network[J]. Applied Mechanics and Materials, 2013, 301(1):580-584.
[27] Stephen J M, Balcer M J. Executable UML:a foundation for model-driven architecture[M]. Boston, MA, US:Addison-Wesley Professional, 2002.
[28] Hoffmann H P. SysML-based system engineering using a model-driven development approach [EB/OL].[2008-10-15]. http:∥rose-hulman.edu / Class / cs / OldFiles / csse490-mbse / Readings/SysML_based_systems_engineering-08.pdf.
[29] Friedenthal S, Alan M, Rick S. A practical guide to SysML: the systems modeling language[M]. Burlington, MA, US: Morgan Kaufmann Publishers, 2014.
[30] Dennis A, Barbara H W, David T. Systems analysis and design: an object-oriented approach with UML[M]. Hoboken, NJ, US: John Wiley & Sons, 2015.
[31] Alexandre S. Automating the application of design patterns based on UML models[D]. Ottawa, Ontario, Canada:Carlcton University, 2005.
Research on the Overall Design of Integrated ElectronicInformation System for Tanks and Armored Vehicles
MAO Ming, LIU Yong, HU Jian-jun
(China North Vehicle Research Institute, Beijing 100072,China)
Integrated electronic information system, which is the basis and core to fulfill the informatization of tanks and armed vehicles, has direct impacts on the platform informatization level and tactical capabilities. The development of integrated electronic information system has been constrained to some extent due to lack of clear understanding on its double role as general informatization unit and vetronics function system. The essential meaning of vetronics system is illustrated, and it is concluded that the electronic information system of tanks and armored vehicles relies on system integration. The history and development process of vetronics technology are reviewed and analyzed, and the important technique points of sensor integration, display and control integration, seat role integration, processing and information integration are discussed and summarized. The key technology, as well as the general design process and modeling simulation method of vetronics system are proposed, which could be considered to provide some useful directions for the evolution of the integrated electronic information system of tanks and armored vehicles.
ordnance science and technology; tank and armored vechicle; integrated electronic information system; architecture; mission; integration
2016-12-03
国家国防科技工业局技术基础科研项目(JSJC2013208C055)
毛明(1962—), 男, 研究员,博士生导师。E-mail: ming_mao@noveri.com.cn
TJ810.1
A
1000-1093(2017)06-1192-11
10.3969/j.issn.1000-1093.2017.06.020
