不同结构形式张力腿平台水动力参数比较分析
2017-07-08闫发锁孙丽萍
闫发锁,刘 浩,苏 威,李 辉,孙丽萍
(1.哈尔滨工程大学,黑龙江哈尔滨150001;2.中海石油深海开发有限公司,广东深圳518000; 3.中海油海洋工程股份有限公司,北京100029)
不同结构形式张力腿平台水动力参数比较分析
闫发锁1,刘 浩2,苏 威1,李 辉3,孙丽萍1
(1.哈尔滨工程大学,黑龙江哈尔滨150001;2.中海石油深海开发有限公司,广东深圳518000; 3.中海油海洋工程股份有限公司,北京100029)
随着张力腿平台(TLP)在深海油气开发领域的广泛应用,在早期传统式(C-TLP)的基础上衍生出了多种结构形式,其中还有延展式(E-TLP)、最小化深海水面式(MOSES)和海之星式(SeaStar)已具备业界建造运营经验。为了体现TLP各类结构形式的性能特点,服务于工程开发方案中平台构型选择,本文基于三维势流理论频域方法,针对现已建造的4种TLP的水动力性能及相关参数进行了对比研究。首先,在质量惯性、结构刚度相似的条件下,完成了各类型平台的主尺度方案;其次,采用SESAM软件分析计算了各方案设计平台的附加质量、势流阻尼和运动响应幅值算子(RAO);最后的结果对比表明,不同结构形式对张力腿平台的固有周期影响很大,分散立柱形式的C-TLP与E-TLP的垂向运动响应更小。
张力腿平台;水动力参数性能;结构形式;三维势流理论
张力腿平台(TLP)是一种典型的半顺应式平台,采用数条张力筋键与海底基础相连,通过浮力和重力的不平衡控制筋键中的初始张力腿。其系泊方式决定了平台的垂向自由度运动(垂荡、横摇、纵摇)近于固定式,而平面内的运动(横荡、纵荡、艏摇)显示出顺应式的特征[1]。一座典型的TLP,其垂荡、纵摇与横摇三个垂向运动的固有周期为2~4 s,而平面内纵荡、横荡和艏摇运动的固有周期约为100~200 s,基本上可以避免平台运动与波浪主要激励频率发生共振的可能性,体现了良好的运动性能。
典型传统式张力腿平台(C-TLP)的总体结构,一般采用横截面为矩形的等长环绕浮筒和立柱、甲板的结构,平台甲板通过4根立柱连接浮筒,立柱通常采用圆柱型结构,主要作用是为平台本体提供必要的结构刚度。平台的浮力由位于水面之下的浮筒和立柱的水下部分提供,浮筒首尾与各立柱端部连接,形成环状结构。
E-TLP(Extended Tension Leg Platform)为延伸式张力腿平台。相对于传统类型的TLP,E-TLP主要是在平台主体结构上做了改进,其主体亦由立柱和浮筒两部分组成,按照立柱数目的不同可以分为三柱式和四柱式,立柱有方柱和圆柱两种形式,在环形基座的每一个边角上,都有一段浮筒沿对角线方向向外延伸,形成悬臂梁,悬臂梁的外端部挂载张力筋键[2-3]。这种结构形式使上部甲板能得到有效支撑,结构设计更为灵活,更能有效地承受平台的载荷。这种延伸悬臂梁结构是区别于传统类型TLP最显著的特点,其由此得名。
海之星式(SeaStar)TLP是最早按照小型化(Mini-TLP)概念设计的张力腿平台,被认为是一种灵活、经济的张力腿平台形式[4]。其主体采用单柱式设计,称为中央柱,中央柱上端支撑平台甲板,在下端部位呈辐射式均匀布置3个矩形截面的浮筒,各浮筒向外延伸成类似悬臂梁结构,彼此在水面上的夹角为120°,且浮筒的截面由根部向外端逐渐缩小。这3个浮筒提供了平台的主要浮力,并且在外端与张力筋连接。
最小化深海水面式(Minimum Offshore Surface Equipment Structure,MOSES)TLP平台主体由4根紧凑的细长立柱、1个水下浮式基座和4个悬伸浮筒组成,平台的浮力主要由基座和浮筒提供[5-6]。整个浮式基座位于水面下较深的位置,通常为多面体结构,受表面波浪影响较小,改善了平台主体的水动力性能,使波浪载荷对平台本体的影响最小化,减小了平台在“疲劳区域”中的响应,从而能以最小的预张力提供符合设计要求的平台运动性能[7-8]。在基座多面体4个对角面位置,立柱与浮筒交接,浮筒向外延伸形成悬臂梁结构,浮筒形状与SeaStar TLP类似。
(王 燕 编辑)
张力腿平台自出现以来衍生的多种形式,体现了自身的水动力性能特点,丰富了平台的应用选择。针对中国南海油气资源的开发,我国开展了张力腿平台概念设计研究[9]。为了服务于工程开发方案中平台选型问题,有必要明确各类结构形式TLP的动力性能特点,系统化的比较研究有待开展[10]。基于此目的,本文依据三维势流理论,并辅以Morison方法对小尺度构件的黏性效应处理,对比分析了4种已有张力腿平台水动力性能,为工程开发方案的选择提供参考。
1 计算原理
目前,工程领域海洋平台的水动力计算主要基于线性势流理论,即假设在均匀、不可压缩和无黏的理想流体中,平台在微幅(波高波长比远小于1)波浪中做微幅运动[11]。流场速度势满足:

在平均水线面上满足运动学条件、动力学条件:

由式(2)和式(3)可得到速度势满足的线性自由面条件:

规则波中稳态情况下Φ=φeiωt。在线性势流理论中,浮体周围的波浪速度势可以分解为3部分φ=φl+ φd+φp,式中φl为单位波幅的一阶入射势,φd为对应的绕射势,φp为辐射势。扰动势φp在物面S根据迭加原理,进一步分解为7部分

式中,φj为第j模态单位运动引起的辐射势。这3种速度势分别对应了入射波产生的Froude-Krylova力,绕射波产生的绕射力和浮体自身运动引起的辐射波产生的辐射力。辐射力(矩)由两部分组成,一部分和浮体的加速度成正比,比例系数为浮体的附加质量;另一部分和浮体的速度成正比,比例系数为浮体的兴波阻尼系数。因此作用于浮体的动力矩可表示为速度和加速度的函数。于是,浮体运动有如下控制方程:

式中,ω为波浪激励频率,[M]为物体质量,[A]为附加质量,[B]为兴波阻尼,[C]为静水回复力刚度,[ξ]为各态运动分量,[FDI]为波浪激励力。其中矩阵[A]和[B]中的Ajk与Bjk即为浮体的附加质量系数与附加阻尼系数,并且是ω的函数。
2 目标平台设计方案
为此本文选取了目前世界在役的几种典型TLP结构型式进行了运动响应分析,以此探讨他们性能。就单纯比较的目的而言,只有在共同的前提条件,或者说相似的重要控制参数的基础上对比才有意义。本文的研究,针对所要对比的4种平台采用了惯性相似的原则,亦即各类平台排水量、重量、重心和惯性矩相同或近似(这样决定了张力筋总预张力也是近似的)。所完成的各种平台的主尺度设计方案,如表1所示;各平台的质量惯性参数如表2所示。
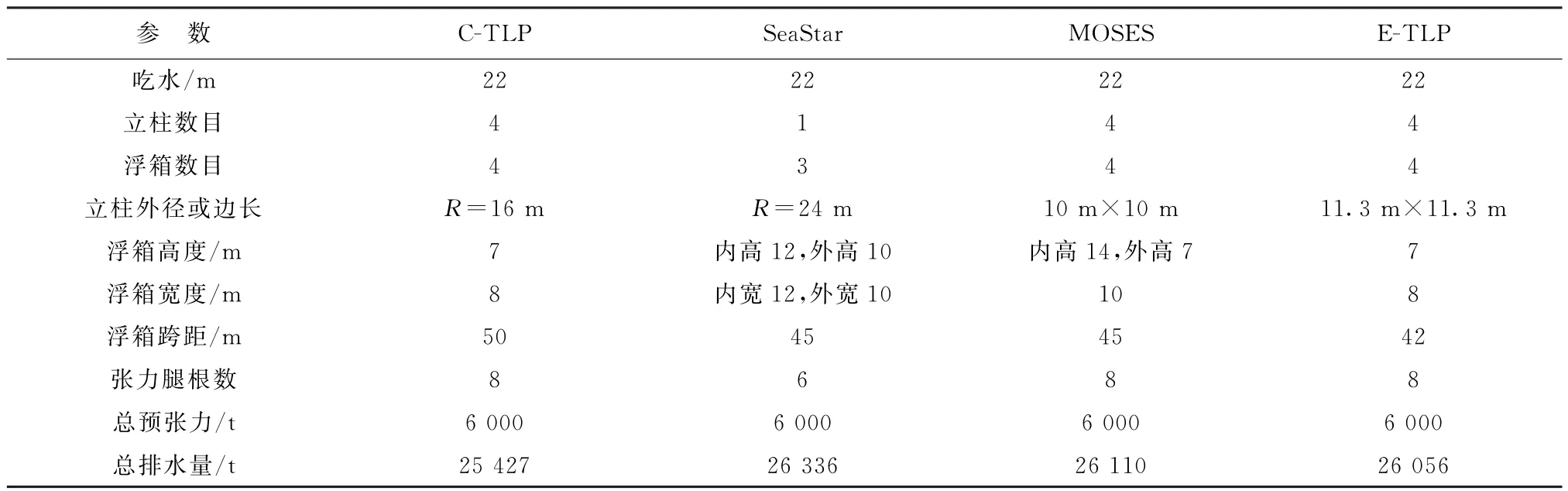
表1 目标平台主要参数Table 1 The main parameters of the TLP studied

表2 质量惯性参数Table 2 Mass inertia parameters of the TLP studied
依据4种平台的几何参数,利用SESAM的Geni E和Hydro D模块分别建立了4种张力腿平台的水动力模型以及莫里森杆模型,其水动力湿表面模型具体如图1所示。模型使用的是右手直角坐标系,原点取在张力腿平台中纵剖面与中横剖面的交线与水线面相交处,X轴为纵轴,Y轴为横轴,Z轴垂直向上为正。
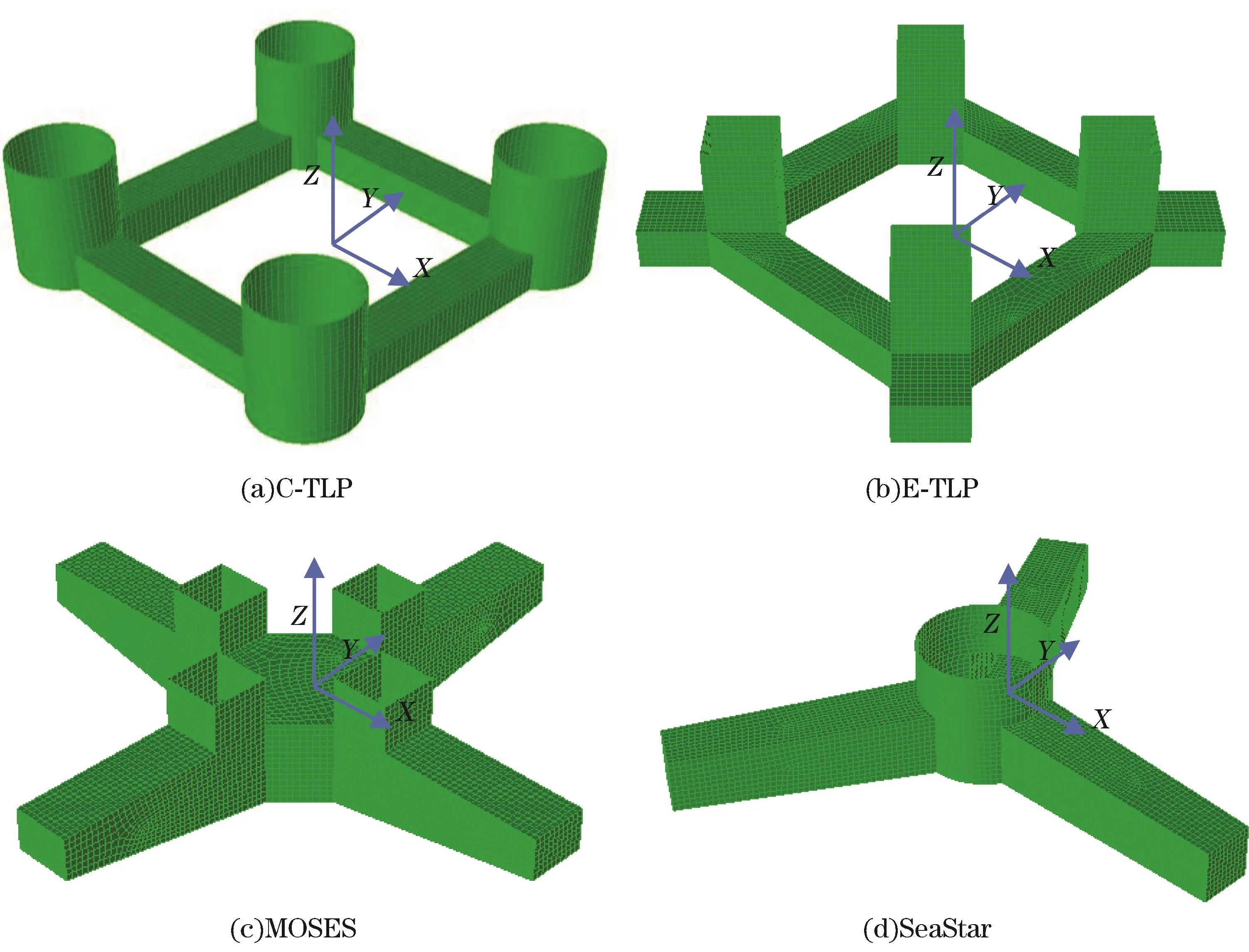
图1 4种形式平台水动力模型Fig.1 The hydrodynamic models of the 4 types of TLP
3 水动力参数及运动性能对比
3.1 附加质量系数
附加质量和阻尼是浮体做强迫简谐运动时受到的稳态水动力和力矩。作用在摇荡浮体上的力和力矩由两部分组成,一部分与摇荡运动的加速度成比例,与加速度的方向相反,既是所谓的附加质量。附加质量和阻尼系数受船体的形状影响较大。本文所针对的4种张力腿平台,水动力性能的差异主要体现在船体的几何形状,即所谓的湿表面形状。
附加质量依赖于运动模态(自由度)、入射波频率和物体的速度,为一个6×6矩阵,起主要作用的为主对角线上的6个分量。本文所研究的4种目标平台的附加质量见图2。由于平台主体形状的对称性,图2中只给出了横荡、垂荡、纵摇、艏摇四个主要分量。从图2可见,各类平台的附加质量主要变化区间位于5~10 s范围,即表示平台以某一周期做单位幅值强迫振动时,受到的平均水动作用力在此范围内非常敏感;在激励波浪周期(T)大于10 s时,各平台的附加质量趋于定常值。由图2a,强迫纵向振动时,MOSES平台受到较大的加速度方向反作用力,纵荡幅值相对较小,其他各平台纵荡附加质量变化趋势与量值相近;通过图2b中可以看出,垂荡附加质量最小的是C-TLP平台,变化较剧烈且平均值最大的是MOSES平台,而ETLP和SeaStar平台居于二者之间且量值接近。所以,在同等总体垂向刚度条件下,MOSES平台具有较大的垂荡固有周期。纵摇附加质量见图2c,E-TLP的纵摇附加质量最大,量值约是其余3种平台的2.5倍。由此也说明,在波浪作用下E-TLP平台纵摇或横摇固有周期较大;考虑平台艏摇情况下的强迫运动受力见图2d,E-TLP艏摇附加质量最高,其次为SeaStar,最低是C-TLP和MOSES平台。

图2 平台各运动模态的附加质量Fig.2 The added mass of different motion modes of TLP
3.2 势流阻尼系数
浮体做强迫简谐运动时受到的稳态水动力和力矩由两部分组成,与运动速度成比例且方向相反的这一部分力和力矩既是所谓的阻尼系数。这部分力和力矩是浮体在运动环境中有自由面存在时所特有的现象,由于自由面的兴波将导致运动能量的耗散。本文所针对的4种张力腿平台,阻尼系数的差异也主要依赖船体的几何形状,即所谓的湿表面形状。在表现形式上,阻尼系数同样有36项,主对角线上的各项起主导作用。
从图3所示的四类平台阻尼系数的对比发现,总体规律上由于量值上的显著差别,该4种平台总体上可以分为两类,一类为C-TLP和E-TLP,另一类为MOSES TLP和SeaStar TLP。划分两类的依据主要考虑到阻尼系数的量值接近程度、变化趋势和频响区间。4种平台的有效阻尼量值周期范围都在0~20 s区间。两类平台阻尼系数的差别主要是因为船体的几何形状,第一类TLP总体上为4个分散开的立柱和环形浮筒结构,而第二类为中央紧凑立柱或立柱群和悬伸浮筒结构。对于纵荡自由度(图3a),C-TLP和E-TLP因为结构形式相似,势流阻尼起伏变化较大,极值出现在波浪周期6.5 s附近,MOSES和SeaStar的峰值周期相对较大,变化幅度小;由此可以推断,纵荡强迫运动时,C-TLP和E-TLP的分散的四立柱浮筒受到的与速度反向的作用力较大,且对周期区间非常敏感,从能量耗散的角度,表征了该类平台在相对高频区间自由面兴波较大,低频区间较小。从垂荡自由度(图3b)看,MOSES TLP因为较大的底部多边形中心舱和悬伸浮筒垂向迎流面积,阻尼幅值最大,且与其他形式相比差距显著;对于纵摇自由度,与平台摇转运动相关的水动作用力主要表现为,MOSES和SeaStar TLP量值接近,且明显大于其他两种形式;考虑艏摇阻尼时,同样因为结构形式,C-TLP和E-TLP峰值大且明显。从变化趋势上看,各自由度势流阻尼在20 s周期及以后渐趋于零。
3.3 运动响应RAO
图4为4种不同结构形式平台在沿X轴正向(0°)来波作用下,平台的运动响应幅值算子(RAO)分布情况。因为纵荡与横荡,纵摇与横摇运动形式相似,所以图中只给出了4个自由度的计算结果。虽然在其他方向来浪情况下,平台运动的RAO幅值有所不同,但图4所给的是在波浪传播方向下平台最为显著的运动自由度结果(垂荡和首摇则与来浪方向不敏感),所以并不失代表性。在纵荡响应中(图4a),4类平台在单位波幅、相同周期的波浪激励下的运动幅值接近,主要是因为平台的平动刚度主要由张力筋的初始预张力提供,实际上4类平台采用了相近的预张力;而对于垂荡和纵摇响应(图4b,图4c),也是TLP平台最为关注的,除固有周期附近外,4类平台相比较而言C-TLP与E-TLP的响应较小,原因是此类平台受到较大的垂向波浪力;对于艏摇运动(图4b),平台转角随运动周期增大而增大,相对之间差别不大,也是因为艏摇刚度由初始张力决定。

图4 平台运动响应RAOFig.4 The motion RAO of the TLP
4 结 论
本文综合现在已有的4种主要结构形式的TLP平台,采用三维线性势流理论方法进行水动力性能的比较分析,讨论了各结构形式的水动力参数及其频响特征。在惯性相似条件下,即近似的排水体积、预张力、重量以及惯性矩,TLP平台的几何形式决定了水动力参数,对平台固有周期的有较大影响;而平台的张力筋腱刚度和初始张力主导平台的运动响应。通过比较分析发现,MOSES平台具有较大的垂荡附加质量,E-TLP具有较大的纵摇/横摇和艏摇附加质量,在相近的张力筋腱刚度条件下,二者可较显著地改变平台的固有周期;而平台势流阻尼参数的不同主要体现在两类平台的结构形式,即分散立柱形式和中央紧凑立柱形式,中央紧凑形式的平台具有明显较大的阻尼系数。需要指出的是,因为TLP平台的张力筋腱的轴向刚度远大于平台浮体自由漂浮状态下的回复力,平台垂荡、横摇和纵摇运动响应主要受此影响;在质量惯性和张力筋刚度的相近条件下,分散立柱形式的C-TLP与E-TLP的垂向运动响应较小。
[1]ZENG X H,SHEN X P,XU B H,et al.Hydrodynamic forces and structural mechanics of tension leg platform[J].Shipbuilding of China,2003,44(Supp.):429-433.曾晓辉,沈晓鹏,徐本和,等.张力腿平台的水动力及结构力学问题[J].中国造船,2003,44(增刊): 429-433.
[2]HUANG E,BHAT S,LUO Y,et al.Evaluation of dry tree platform concepts[C]∥Offshore Technology Conference.Houston,Texas: OTC,2000.
[3]CHEN X J.Research of extended tension leg platform based on South China Sea[D].Tianjin:Tianjin University,2011.陈孝建.南海延伸式张力腿平台设计研究[D].天津:天津大学,2011.
[4]KIBBEE S,CHIANIS J,DAVIES KB,et al.The seastar tension-leg platform[C]∥Offshore Technology Conference.Houston,Texas: OTC,1994.
[5]FURLOW W.Unlimited depth minimal TLP gets first application on Prince[J].Offshore,2001,61(10):1-2.
[6]WYBRO P G,SHELL D,CHAISON M.Development of deepwater fields using MOSES small TLP[J].Journal of Offshore Technology, 1995,3(3):36-39.
[7]YANG H.Dynamic performance analysis of a MOSES TLP in extreme environment[D].Harbin:Harbin Engineering University,2015.杨慧.MOSES TLP在极端环境下的动力性能研究[D].哈尔滨:哈尔滨工程大学,2015.
[8]YAN F,YANG H,SUN L,ZHANG D.Nonlinear analysis of dynamic responses of a MOSES TLP in extreme conditions[C]∥ASME, Proceedings of 34th International Conference on Ocean,Offshore and Arctic Engineering.St.John’s:ASME.2015.
[9]The Group for“Typical Deep Water Platform Conceptual Design”.Hydrodynamic analysis for TLP[J].Shipbuilding of China,2005,46: 477-489.“典型深水平台概念设计研究”课题组.张力腿平台水动力响应分析[J].中国造船,2005,46:477-489.
[10]LI H.Tension leg platform hydrodynamic response and global strength research[D].Harbin:Harbin Engineering University,2011.李辉.张力腿平台水动力响应与总体强度研究[D].哈尔滨:哈尔滨工程大学,2011.
[11]DAI Y S,DUAN W Y.Potential flow theory of ship motions in waves[M].Beijing:National Defense Industry Press,2008.戴遗山,段文洋.船舶在波浪中运动的势流理论[M].北京:国防工业出版社,2008.
A Comparative Study on the Hydrodynamic Parameters of Different Tension Leg Platforms(TLP)
YAN Fa-suo1,LIU Hao2,SU Wei1,LI Hui3,SUN Li-ping1
(1.Harbin Engineering University,Harbin 150001,China; 2.CNOOC Deepwater Development Co.Ltd.,Shenzhen 518000,China; 3.China Offshore Oil Engineering Corporation,Beijing 100029,China)
With the widespread use of tension leg platform(TLP)in the field of deep-sea oil and gas exploration,multiple structural forms of TLP have been arisen on the basis of the early conventional TLP(CTLP),of which the extended TLP(E-TLP),the minimum offshore surface equipment structure(MOSES)and the sea-star TLP(SeaStar)have been practically applied in industry.In order to give expression to the performances of different structural forms of TLP and to serve the platform configuration selection in engineering development programs,the hydrodynamic performances and related parameters of the 4 types of TLP are compared based on the frequency domain method of 3-D potential flow theory.Firstly, the main dimension scheme of all the types of platforms is completed under the conditions of similar mass inertia and structural rigidity,and then the added mass,the potential flow damping and the motion response amplitude operators(RAOs)of the platforms designed in different schemes are analyzed and computed by means of SESAM software.The comparison of the final results indicate that the structural forms have a great influence on the natural period of the TLP,and that the dispersed column types of C-TLP and E-TLP have a smaller response to the vertical motion.
tension leg platform;hydrodynamic performance;structural form;3-D potential flow theory
January 20,2017
U661.4
A
1002-3682(2017)02-0001-08
10.3969/j.issn.1002-3682.2017.02.001
2017-01-20
工业和信息化部海洋工程装备科研项目——500米水深油田生产装备TLP自主研发
闫发锁(1977-),男,副教授,博士,主要从事浮式结构物载荷与响应方面研究.E-mail:yanfasuo@hrbeu.edu.cn
