无人机航空摄影测量在城市竣工测绘中的应用与实践
2017-07-07陈玲丁亚杰
陈玲,丁亚杰
(常州市测绘院,江苏 常州 213003)
无人机航空摄影测量在城市竣工测绘中的应用与实践
陈玲*,丁亚杰
(常州市测绘院,江苏 常州 213003)
以多旋翼无人机为航摄平台,对新建小区进行大比例尺地形图快速测绘,得到1∶500地形图及正射影像图,本文通过对无人机航空摄影、影像、空三加密、立体采集、正射影像制作的作业方法和流程介绍及质量情况分析,阐述无人机航空摄影测量在城市竣工测绘中的实际应用情况。
无人机航空摄影;竣工测绘;1∶500地形图
1 引 言
无人机航摄系统作为全数字摄影测量的有力补充,目前在应急测绘、国土资源监测、重大工程建设等方面得到广泛应用。它机动灵活、数据获取快捷、地面分辨率高、高效快速、作业成本低等优势,在小区域和人行困难地区高分辨率影像快速获取方面具有明显优势。
近年来,无人机航测遥感技术在测绘行业有了很大的推广应用,但大多是用于生产制作DOM及小比例尺带状地形图测绘等,对于大比例尺地形图的生产只能满足 1∶2 000、1∶1 000精度,对 1∶500比例尺地形图测绘还没有得到推广应用。本文从单位实际生产实例出发,以目前最先进的无人机航测技术为主线,分析探讨和解决了无人机航测的一些特殊问题并论证了无人机航空摄影测量系统应用于 1∶500比例尺地形图生产的可行性,为无人机航空摄影测量技术在大比例尺地形图测绘的应用积累了经验。
2 无人机航摄系统
低空无人飞行器航摄系统是以无人机为飞行平台,获取和处理高分辨率及高精度遥感影像的崭新技术。利用空中和地面控制病影像的自动拍摄和获取,同时实现航迹规划和监控、数据压缩和自动传输,影像预处理等功能,是具有高智能化、稳定可靠、作业能力强的低空遥感系统。
2.1 系统组成
无人机航空摄影测量系统由飞行平台、地面站系统、航拍摄影系统、数据处理软件等组成。飞控系统包含机载飞控、地面站及通信设备,是飞行控制的核心设备。其主要任务是利用导航定位信号,对过测定无人机在飞行中的速度、高度、姿态等信息以及接收处理地面发射的测控信息,对无人机进行数字化控制,控制无人机按照预定的航迹飞行。地面站系统则是通过从地面计算机上监视飞行状态,并根据航线规划和实际飞行情况调整和控制飞行任务的执行。航拍摄影系统是通过搭载在无人机上的数码相机等小型遥感传感器进行影像获取。目前普通的数码相机都具有 2 000万像素左右的分辨率,可获得地面分辨率 0.2 m、 0.1 m及以上地面影像。最后通过一系列的数据后处理软件对无人机航摄获取的数据进行处理,从而获得DLG、DEM、DOM等各种所需的成果。
2.2 无人机的优势
(1)现势性强。
(2)影像清晰,分辨率高。
(3)云下摄影,受气候影响小。
(4)摄影方向任意,自主性强,可以量测。
(5)场地限制少,自主性强,效率高。
3 无人机航摄系统在小区竣工项目中的应用
3.1 竣工测区概况
本项目实施的测区位于金坛镇区,为新建小区竣工,面积约 0.22 km2,测区内地势平缓,共有建筑51幢,多数为11层房屋。附属设施均已建设完成。
3.2 技术流程
具体作业流程如图1所示。
3.3 航摄资料情况
本项目采用大疆S1000多旋翼无人机进行航摄,如图2所示。
航摄时间: 2015年12月

图1 技术流程图
相机:索尼α6000微单。
焦距:16 mm。
航高:204 m。
像幅:23.5 mm*15.6 mm。
像元大小:0.003 92 mm。
像片重叠度:航向70%~85%,旁向50%左右。
像片旋偏角:小于7°;倾斜角:小于2° ;航线弯曲度:小于3%。
影像质量:色彩均匀清晰,颜色饱和无云影,层次丰富反差适中。

图2 小区航线分布图
3.4 像控布设及测量
像片控制点全部布设为平高控制点,测区外围与测区内均匀布设平高点。采用网络RTK模式测量像控点。在野外选择合适的点位,点位的选择按照规范要求,在图纸上标记像控点点号,并利用手机拍摄近、远两张照片作为点之记的补充资料,供空三加密解算时参考。为保证测区 1∶500测图精度,本测区共布设了31个平高点,其中一部分可作为检查点使用。在空三解算过程中,我们进行了多种布点方案的测试,布点及精度情况如表1所示,□为像控点,△为检查点。通过方案对比,为保证较高的测图精度,我们认为在测区周边均匀布设4个点,中间适量布1~2个点即可满足500测图精度。

多余控制点误差表 表1
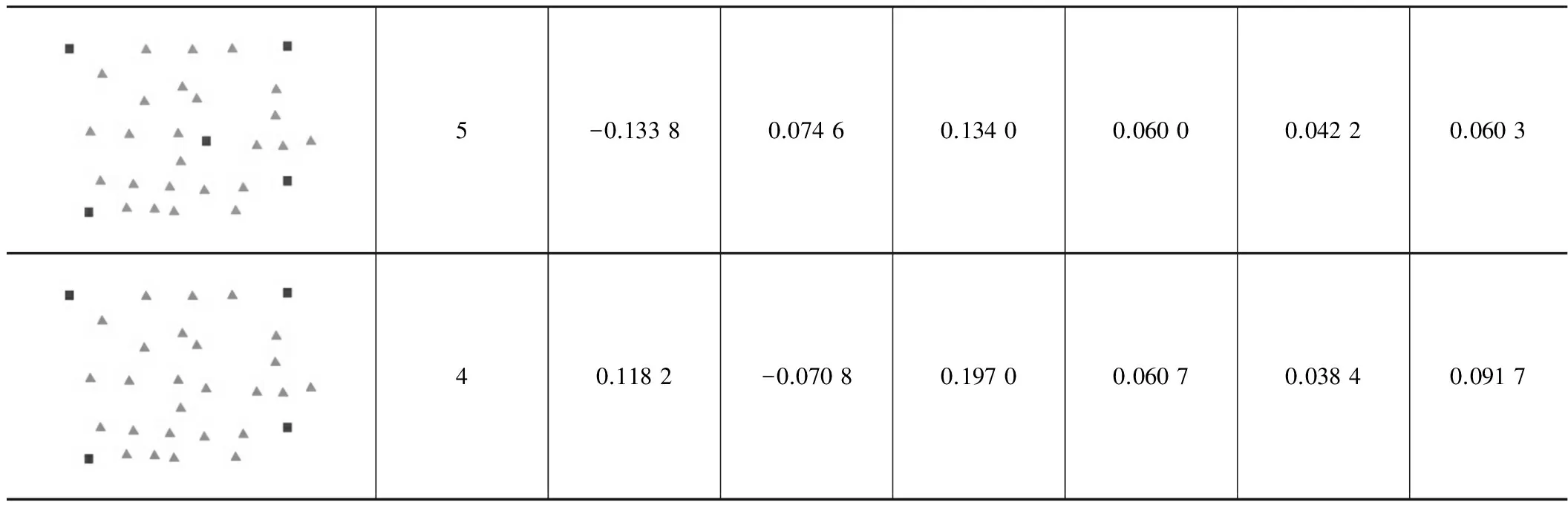
续表1
3.5 空三解算
由于无人机获取的航片不仅像幅小,影像畸变大,而且偏角和滚角也大,为此,本项目采用SVS低空摄影测量系统进行空三加密与平差解算,其自动空三模块具有快速并行处理海量数据的能力,平差模块具有处理姿态极差航片的能力。能够快速高效地生成大量高精度、高强度的模型连接点,获得高精度的空三加密结果,以满足大比例尺测图的要求。空三加密成果精度如表2所示。
多余控制点误差表 表2
检查点平面最小误差为 0.015 3 m,最大误差为 0.083 2 m,中误差为 0.052 3 m。检查点高程最小误差为-0.014 7 m,最大误差为 -0.078 8 m,中误差为 0.047 3 m,均符合相关规范要求。
3.6 线划图采集制作
在航天远景MapMatrix全数字摄影测量工作站上进行内业数据采集,直接将加密像对导入测图工作站。内业测绘所有地物的外轮廓,对立体判测有疑问的影像加注说明,为下一工序提供准确、可靠、完整的数据。由于无人机拍摄的影像像幅小,重叠度不规则,因此在立体量测时,模型采集区域要严格把控,尽量在中心区域进行量测,离开像片边缘至少 1 cm~2 cm。
外业根据内业测定的定位点、线调绘地物性质,对新增、变化的地物进行现场实测,对高程注记点进行外业实地采集测量。
当外业调绘、补测完成后,根据统一的作业文件,采用统一的平面坐标系、高程系、等高距,明确坐标取位,对线划图进行编辑入库。
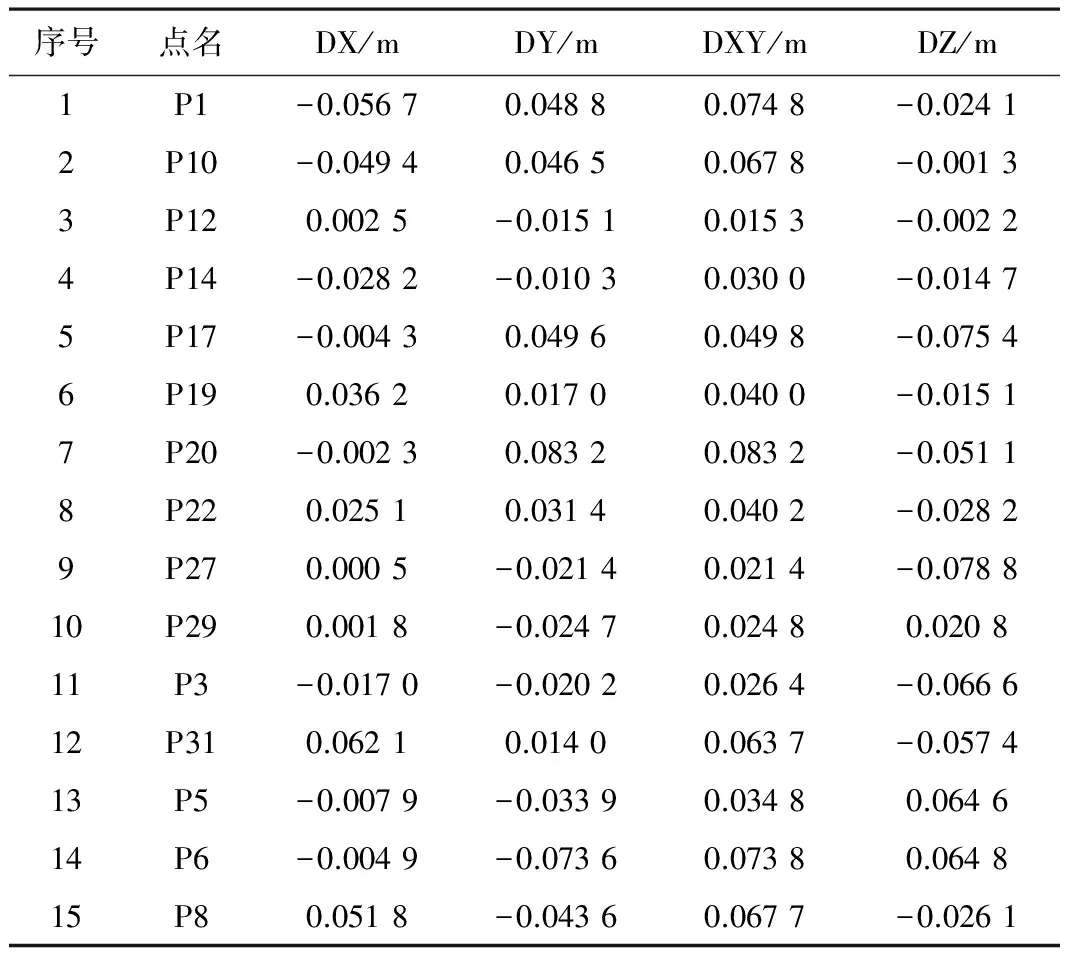
我们对成果数据进行检查,将无人机航空摄影测量的数据与外业实测点位进行比较。检查内容包括平面精度检测,高程精度检测,检查情况如表3、表4所示:

平面精度检查统计表 表3

续表3

高程精度检查统计表 表4
平面精度统计结果,最小误差 0.005 m,最大误差 0.239 m,中误差 0.111 m。高程精度统计结果,最小误差 0.035 m,最大误差 0.378 m,中误差 0.200 m。通过对所抽查图幅的各项质量特性检查,平面精度达到 1∶500精度要求,高程精度达到 1∶2 000精度要求,若 1∶1 000地形图等高线采用 1 m等高距,此时高程精度达到了 1∶1 000精度要求。
3.7 DEM与DOM制作
根据格网密度由模型自动生成DEM,对人工地物及植被等DEM处进行编辑,利用编辑好的DEM和经纠正后的原始影像进行正射影像。竣工测绘一般区域较小,地面一般较平整,因此DEM的编辑工作较小,有些高差小的可以通过直接赋予一个平均高程的方式生成DEM。用编辑完成的DEM与影像进行正射纠正,由于无人机航摄一般像片像幅都较小,新建的竣工地块一般高层楼房较多,体块较大,往往会跨度几张像片,因此在DOM拼接编辑时要注意高层房屋的拼接情况,在保证房屋完整的情况下尽量使房屋倒向一致。另外,如只需影像索引及工作用图时,可采用快拼的方法,即只进行影像自动镶嵌拼接而不进行后期编辑处理,此方法拼接的影像在检查飞行质量及像控布点时有极大用处。
4 总结与经验
通过实际生产作业,我们认为无人机航空摄影测量在小区竣工测绘中的应用与下面一些因素有直接关系:
(1)影像质量
拍摄当天天气晴朗,获取的影像色彩均匀清晰,颜色饱和无云影,层次丰富反差适中,并且姿态保持稳定,影像质量较好,有利于后期空三精度的提高。
(2)相机严格标定与畸变差改正
由于无人机航摄采用的是普通数码相机,与量测相机相比,普通相机像幅小、畸变大、飞行姿态不稳定等因素对空三精度影响较大,为满足精度要求,我们需要对相机进行了严格的标定,并在空三加密前对影像进行了畸变差改正。
(3)空三软件的性能
在利用SVS软件进行空三加密过程中,软件自动匹配得到的像点较多,另外通过软件“二次转点”功能,进一步加大匹配点的数量。通过迭代运算,软件自动检测并将粗差点剔除,获得稳固的加密网。
(4)像控布设
此次项目测区面积约0.2 km2,通过不同像控布设方案的对比,在测区周边均匀布设4个点,中间适量布1个~2个点即可满足500测图精度。较密的控制网对空三精度的提高意义重大。另个如果航飞时同步进行差分GPS进行定位,相信像控点的数量会大大差少。
(5)立体采集精度
由于无人机影像是采用普通数码相机拍摄的,虽然经过了畸变差改正,但影像边缘误差较中心区域仍有所增大,在立体采集时需特别注意,尽可能不采用模型边缘进行地物采集,以提高测图精度,航向70%~85%、旁向50%左右的像片重叠度也为这样操作提供了可能。
5 结 语
实践证明无人机航空摄影测量在城市竣工测绘中能快速、高效地提供高精度、高分辨率的线划图与影像图,采用无人机航测系统,效率高,成本低,灵活机动,应急反应快,并能大大减少外业工作量,且数据获取可靠直观。为城市及乡镇竣工测绘提供可能。但也存在飞行姿态不稳定、影像重叠度不规则、像幅小像片数量多、影像畸变大等缺陷。目前低空无人机航空摄影测量在城市测绘的应用还处于初级阶段,在实际应用中还有许多需要探索的地方,如航飞的智能化及飞行时精密POS的获取,解决加载大像幅、多镜头数码相机,后期数据处理的自动化等,还需要不断研究和总结。
[1] 张祖勋. 从数字摄影测量工作站(DPW)到数字摄影测量网格(DPGrid)[J]. 武汉大学学报·信息科学版,2007.
[2] 何敬,李永树,鲁恒等. 无人机影像的质量评定及几何处理研究[J]. 测绘通报,2010(4):22~24.
[3] 杜全叶,陆锦忠. 无人飞艇低空摄影测量系统及其DOM制作关键技术[J]. 测绘通报,2010(6):41~43.
[4] 凡亦文,刘海全,高文涛等. 无人机航空摄影测量在大比例尺测图中的应用[A]. 第十七届中国遥感大会[C]. 2010.
[5] 杨润书,吴亚鹏,李加明等. 无人机航摄系统的特点及应用前景探讨[J]. 地矿测绘,2011(27):8~9.
[6] 中国标准出版社第四编辑室. 测绘标准汇编——摄影测量与遥感卷[J]. 北京:中国标准出版社.
[7] 王鹏. 浅析无人机1∶1000地形图测绘中的应用及实践[J]. 华北国土资源,2013(6):83~85.
[8] 蔡雪梅. 浅析无人机在测绘中的应用[J]. 大科学,2013(19):244~245.
Application of UAV Aerial Photogrammetry for Urban Construction Completion Acceptance
Chen Ling,Ding Yajie
(Changzhou Surveying and Mapping Institute,Changzhou 2130002,China)
In multi-rotors unmanned aerial vehicle (UAV) photogrammetry platform,new residential area for the large scale topographic map surveying and mapping,quick get 1∶500 topographic map and orthography like figure,this article through to the UAV aerial photography,video,empty three encryption,three-dimensional acquisition,orthogonal projection like making method and process is introduced and the quality of analysis,expounds UAV aerial survey completed in city surveying and mapping in the actual application situation.
unmanned aerial photogrammetry;completion of surveying and mapping;1∶500 topographic map
1672-8262(2017)03-110-05
P237
B
2016—07—28
陈玲(1979—),女,工程师,主要从事航空摄影测量、4D生产等相关技术工作。
